1.本发明涉及医疗设备领域,更具体的说是一种医用伤口清洁器。
背景技术:
2.根据患者损伤的情况,对患者进行表面清理的装置,进而实现对伤口的清理;专利号为202020785988.8公开一种外科手术术后伤口清洁护理装置,包括底板,所述底板的上表面固定安装有伸缩杆,所述底板的下表面转动连接有底轮,所述伸缩杆的上端固定连接有护理台,所述护理台的上表面设置有护理机构和清洗机构。该实用新型通过设置的护理机构和清洗机构的配合使用,可便于为外科手术后的患者更换药剂和绷带,还可对患者的伤口进行清洗,有利于患者的及早康复,且护理机构和清洗机构通过滑块与护理台滑动连接,可适应不同的患者,通用性较强,通过设置的臂带与护理台固定连接,防止使用者在清洁护理的过程中由于疼痛导致手臂晃动影响护理效果,且防止护理过程中患者出现大出血的情况。但是该设备无法根据数据结果实现皮肤清理的自动化。
技术实现要素:
3.本发明的目的是提供一种医用伤口清洁器,其有益效果为通过程序算出结果,配合人设备的自动操作,对所要进行清理的皮肤实现自动清理。
4.本发明的目的通过以下技术方案来实现:
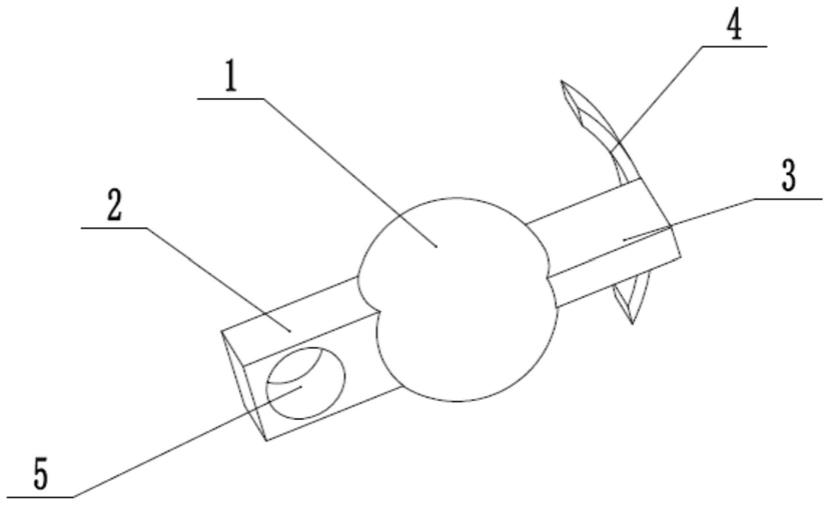
5.本发明的目的是一种医用伤口清洁器,包括中心驱动球体、清洁器连接板、调节驱动板、弧形角度驱动板和清洁器连接螺纹孔,所述中心驱动球体的两端分别固定连接清洁器连接板和调节驱动板,调节驱动板上固定连接有用于角度驱动的弧形角度驱动板,清洁器连接板上设置有用于固定清理器的清洁器连接螺纹孔。
6.所述中心驱动球体转动连接在用于传动调节的球形转动槽内,球形转动槽设置在用于深度驱动调节的深度驱动座内,深度驱动座上固定连接有用于角度驱动的角度驱动器,角度驱动器通过齿轮啮合传动弧形角度驱动板;深度驱动座上固定连接有用于深度驱动连接的深度驱动齿轮。
7.所述深度驱动座深度纵向滑动连接在用于横向驱动调节的横向滑动座内,横向滑动座上固定连接有用于深度驱动的深度驱动器,深度驱动器啮合传动深度驱动齿轮;横向滑动座上固定连接有用于横向驱动的横向驱动齿轮。
8.所述横向滑动座横向滑动连接在用于限定横向位移的横向限位固定框内,横向限位固定框上固定连接有用于横向驱动的横向驱动器,横向驱动器通过齿轮啮合传动连接横向驱动齿轮。
9.所述横向限位固定框设置有两个,两个横向限位固定框分别对称固定连接在用于夹紧固定肢体的左夹紧器和右夹紧器内。
10.通过在左夹紧器和右夹紧器上分别固定连接用于操作和记录使用对损坏的皮肤进行清理的装置,进而通过左夹紧器和右夹紧器在对病人皮肤损坏部位进行夹紧,再通过
两个横向限位固定框上的结构实现自动驱动和清理的过程,进而通过自动化的驱动和使用,对病人损坏的皮肤进行自动的修理,确保精准度,进而实现皮肤清理的自动化。
11.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果为通过程序算出结果,配合人设备的自动操作,对所要进行清理的皮肤实现自动清理;通过不同进行清理的部位进行调整夹紧;通过纵向深度、横向和角度转动的驱动调节,配合程序整理,实现皮肤清理的自动化。
附图说明
12.图1是本发明的中心角度驱动连接的结构示意图一;
13.图2是本发明的中心角度驱动连接的结构示意图二;
14.图3是本发明的纵向深度操作的结构示意图一;
15.图4是本发明的纵向深度操的结构示意图二;
16.图5是本发明的横向位移操作的结构示意图一;
17.图6是本发明的横向位移操作的结构示意图二;
18.图7是本发明的夹紧器的结构示意图;
19.图8是本发明的左夹紧器的结构示意图;
20.图9是本发明的右夹紧器的结构示意图;
21.图10是本发明的弹簧锁紧顶座的结构示意图;
22.图11是本发明的上夹紧台的结构示意图;
23.图12是本发明的探测操作的结构示意图;
24.图13是本发明的整体的结构示意图;
25.图14是本发明的整体的结构示意图。
26.图中:中心驱动球体1;清洁器连接板2;调节驱动板3;弧形角度驱动板4;清洁器连接螺纹孔5;深度驱动座6;球形转动槽7;角度驱动器8;深度驱动齿轮9;横向滑动座10;深度驱动齿轮11;横向驱动齿轮12;横向驱动器13;两个横向限位固定框14;左夹紧器15;右夹紧器16;弧形弹簧杆17;多个弧形弹簧18;夹紧弧形底台19;上夹紧台槽20;固定插槽21;中心轴22;探测滑槽23;尺寸调节弹簧轴24;上夹紧台25;锁紧插座26;伸缩探测杆27;探测记录仪28;
具体实施方式
27.下面结合附图对本发明作进一步详细说明。
28.如这里所示的实施方式所示,
29.通过中心驱动球体1的结构特性,方便实现在对烫伤或者皮肤损伤的病人的皮肤清理进行角度调节,进而通过自动控制在对皮肤清理的时候,清洁范围大,清洁角度多,适用于对自动操作的使用;通过清洁器连接板2和清洁器连接螺纹孔5方便根据实际情况连接电动剪刀或者激光切割器,进而根据实际情况对损伤的皮肤进行清理;通过调节驱动板3和弧形角度驱动板4方便对安装的电动剪刀或者激光切割器进行角度驱动的调节,进而实现多角度的自动清理。
30.结合以上实施例进一步优化:
31.进一步的根据图1、图2、图3和图4所示的一种医用伤口清洁器示例的工作过程是:
32.通过中心驱动球体1转动连接在球形转动槽7内的球体特性,实现多角度的转动,进而方便对自动使用的角度调节及其操作范围,通过深度驱动座6的纵向深度的移动,进而实现对纵向深度的位移及操作,进而保障在自动操作和使用时,对纵向深度的操作;通过角度驱动器8与弧形角度驱动板4的传动啮合,进而使中心驱动球体1在球形转动槽7内发生角度偏移,进而将角度偏移的驱动算入程序中,方便自动使用和操作。
33.结合以上实施例进一步优化:
34.进一步的根据图3、图4、图5和图6所示的一种医用伤口清洁器示例的工作过程是:
35.通过深度驱动座6纵向滑动在横向滑动座10内,进而在深度驱动器11啮合传动深度驱动齿轮9的驱动下实现纵向深度的位移,通过算入程序内的操作,实现对深度操作的自动操作和记录。
36.结合以上实施例进一步优化:
37.进一步的根据图3、图4、图5和图6所示的一种医用伤口清洁器示例的工作过程是:
38.通过横向滑动座10在横向限位固定框14内限定横向位移;通过横向驱动器13与横向驱动齿轮12的啮合驱动,进而实现对横向驱动的自动操作和记录,方便在程序实现自动操作时,对横向位移操作进行自动操作和记录。
39.结合以上实施例进一步优化:
40.进一步的根据图5、图6、图7和图8所示的一种医用伤口清洁器示例的工作过程是:
41.通过在左夹紧器15和右夹紧器16上分别固定连接用于操作和记录使用对损坏的皮肤进行清理的装置,进而通过左夹紧器15和右夹紧器16在对病人皮肤损坏部位进行夹紧,再通过两个横向限位固定框14上的结构实现自动驱动和清理的过程,进而通过自动化的驱动和使用,对病人损坏的皮肤进行自动的修理,确保精准度,进而实现皮肤清理的自动化。
42.结合以上实施例进一步优化:
43.进一步的根据图5、图6、图7和图8所示的一种医用伤口清洁器示例的工作过程是:
44.通过左夹紧器15和右夹紧器16之间的中端位置的相互铰接,进而实现对所要进行清理的肢体部位进行夹紧和固定,防止在皮肤修理中发生移动,影响操作的精度。
45.结合以上实施例进一步优化:
46.进一步的根据图7、图8、图9和图10所示的一种医用伤口清洁器示例的工作过程是:
47.通过左夹紧器15和右夹紧器16之间的弧形弹簧杆17以及弧形弹簧杆17上的弧形弹簧18,进而实现在手动夹紧左夹紧器15和右夹紧器16的上端,进而使左夹紧器15和右夹紧器16的下端张开,进而方便用于对病人损坏部位或者肢体进行夹紧固定;通过弧形弹簧杆17上的弧形弹簧18在夹紧病人肢体时,通过弧形弹簧18的作用力,进行固定的同时防止张开,影响清理的操作。
48.结合以上实施例进一步优化:
49.进一步的根据图7、图8、图9和图10所示的一种医用伤口清洁器示例的工作过程是:
50.通过在对肢体和部位进行夹紧时,通过夹紧弧形底台19将底端进行夹紧,避免发
生肢体的偏移;通过夹紧弧形底台19上粘接有橡胶避免在夹紧过程中对夹紧的皮肤产生影响。
51.结合以上实施例进一步优化:
52.进一步的根据图9、图12、图13和图14所示的一种医用伤口清洁器示例的工作过程是:
53.通过在左夹紧器15和右夹紧器16上的探测滑槽23内操作伸缩探测杆27,进而通过操作伸缩探测杆27对所要进行记录的部位进行操作记录。
54.结合以上实施例进一步优化:
55.进一步的根据图9、图12、图13和图14所示的一种医用伤口清洁器示例的工作过程是:
56.通过探测记录仪28将观测到的发生损坏需要进行清除的皮肤进行观测记录和汇总,进而通过程序分析,将所要进行清理的数据汇总,通过程序自动驱动电机的运行,进而对所要进行摘除的皮肤进行清除,实现医疗上皮肤清理的自动化。
57.结合以上实施例进一步优化:
58.进一步的所述左夹紧器15和右夹紧器16的内壁均对称设置有用于限位滑动夹紧板的上夹紧台槽20;上夹紧台槽20内固定连接有用于弹簧夹紧的尺寸调节弹簧轴24。
59.该部分根据图8、图9、图11和图13所示的一种医用伤口清洁器示例的工作过程是:
60.通过夹紧左夹紧器15和右夹紧器16的上端,进而张开下端,将肢体夹紧固定,通过夹紧弧形底台19将肢体的底端进行固定,防止发生偏移同时固定所要进行自动清理的装置,并操作记录。
61.结合以上实施例进一步优化:
62.进一步的所述尺寸调节弹簧轴24滑动设置有用于根据尺寸调节的上夹紧台25,上夹紧台25设置在尺寸调节弹簧轴24上的弹簧和上夹紧台槽20的内壁之间。
63.该部分根据图8、图9、图11和图13所示的一种医用伤口清洁器示例的工作过程是:
64.通过滑动的上夹紧台25将根据不同尺寸的肢体进行调节,防止无法将肢体完全固定的现象出现;通过上夹紧台25将肢体的上半部位进行夹紧固定。
65.结合以上实施例进一步优化:
66.进一步的所述上夹紧台25上设置有用于固定的固定插槽21,上夹紧台25上的固定插槽21与左夹紧器15和右夹紧器16上的固定插槽21均插接有用于锁紧固定的锁紧插座26。
67.该部分根据图8、图9、图11和图13所示的一种医用伤口清洁器示例的工作过程是:
68.在上夹紧台25的位置确定后,通过插入锁紧插座26将上夹紧台25锁死,进而实现根据不同肢体和位置的大小进行固定的效果。
69.结合以上实施例进一步优化:
70.进一步的所述清洁器连接螺纹孔5内通过螺纹配合连接电动剪刀。
71.该部分根据图14、图9、图11和图13所示的一种医用伤口清洁器示例的工作过程是:
72.根据不同的清理情况和部位,安装电动剪刀或者激光清理器,通过自动电动剪刀或者激光清理器对多余或者损坏的皮肤进行自动的摘除,配合数据操作的自动控制,实现在医疗领域对皮肤清理的自动化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

