1.本实用新型实施例涉及医护人员训练技术领域,具体涉及一种医护人员六自由度摇摆训练平台。
背景技术:
2.舰艇经常航行于波涛汹涌、气象变化无常的海洋,且远离大陆,舰员突发疾病、意外受伤等情况下,急需在海上开展医护处理,舰艇在海洋环境中的六自由度摇摆运动,为医护处理带来了严峻挑战,对医护人员的技术水平提出了很高的要求。因此,为提高医护人员在舰艇摇摆情况下的技能,缩短训练周期,提高训练效率,节约训练经费,减少训练风险,需要在陆地建造,用于模拟舰艇摇荡情况下医护人员训练平台,其中,用于模拟舰艇风浪环境中摇荡情况的医护训练舱是主体结构,是训练平台重要组成之一,我国在摇摆平台的设计建造方面一直在跟踪国外产品和技术,同时缺乏建造适合模拟舰艇海上运动特点的摇摆平台设计方案。因此,有必要实现一种能够精准、可靠的模拟舰艇海上航行时摇摆情况的平台,从而弥补我国在舰艇医护人员训练上的不足,对提高海上医护训练具有重大的实际应用价值。
技术实现要素:
3.为此,本实用新型实施例提供一种医护人员六自由度摇摆训练平台,以解决现有技术中舰艇医护人员训练不足的问题。
4.为了实现上述目的,本实用新型实施例提供如下技术方案:
5.根据本实用新型实施例公开的一种医护人员六自由度摇摆训练平台,包括框架、控制器、第一伺服电机、第二伺服电机、第三伺服电机、第四伺服电机、绞盘、钢缆和医护训练舱,所述框架顶部设置有第一支撑杆和第二支撑杆,所述第一伺服电机和所述第二伺服电机安装于第一支撑杆上,所述第三伺服电机和所述第四伺服电机安装于第二支撑杆上,所述第一伺服电机、所述第二伺服电机、所述第三伺服电机和所述第四伺服电机的输出端均与绞盘相连,每个所述绞盘上均盘绕有钢缆,所述绞盘用于对钢缆进行收放,所述钢缆远离所述绞盘的一端与所述医护训练舱相连,四根所述钢缆远离所述绞盘的一端分别连接于所述医护训练舱的四个角上,所述第一伺服电机、所述第二伺服电机、所述第三伺服电机和所述第四伺服电机均与所述控制器电连接。
6.进一步地,绞盘与所述医护训练舱之间均设置有滑轮,所述滑轮的数量与绞盘相对应,4个所述滑轮分别固定于第一支撑杆和第二支撑杆上,所述钢缆在所述滑轮上滑动。
7.进一步地,滑轮选用转向滑轮。
8.进一步地,框架和所述医护训练舱可以根据实际应用情况进行大小的调整。
9.进一步地,还包括存储器,所述存储器与所述控制器电连接,所述存储器内存储有海浪、风和/或舰艇运动的参数及对应参数的调节比例,所述控制器通过设置具体参数进而模拟海上舰艇的具体摇摆情况。
10.进一步地,控制器通过无线传输模块与远程移动终端相连,所述远程移动终端可以对控制器进行设置。
11.进一步地,所述远程移动终端选用工控机。
12.进一步地,所述钢缆和所述医护训练舱通过环扣连接。
13.本实用新型实施例具有如下优点:
14.本实用新型具体公开的医护人员六自由度摇摆训练平台通过控制器、第一伺服电机、第二伺服电机、第三伺服电机和第四伺服电机的相互配合,可以实现医护训练舱的六自由度摇摆运动;通过控制器可以设置海浪、风、舰艇运动等参数,进而真实的模拟舰艇在海上的运动情况,使装置操作便捷,提高了装置的可控性和便捷性。
附图说明
15.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
16.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。
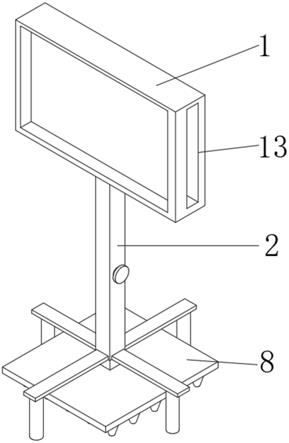
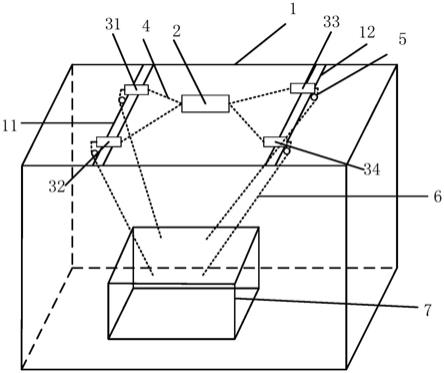
17.图1为本实用新型实施例提供的一种医护人员六自由度摇摆训练平台的结构示意图;
18.图2为本实用新型实施例提供的控制器电路系统示意图。
具体实施方式
19.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.结合图1和图2所示,本实用新型具体实施例公开了一种医护人员六自由度摇摆训练平台,包括框架1、控制器2、第一伺服电机31、第二伺服电机32、第三伺服电机33、第四伺服电机34、绞盘、钢缆6和医护训练舱7,所述框架1顶部设置有第一支撑杆11和第二支撑杆12,所述第一伺服电机31和所述第二伺服电机32安装于第一支撑杆11上,所述第三伺服电机33和所述第四伺服电机34安装于第二支撑杆12上,所述第一伺服电机31、所述第二伺服电机32、所述第三伺服电机33和所述第四伺服电机34的输出端均与绞盘相连,每个所述绞盘上均盘绕有钢缆6,所述绞盘用于对钢缆6进行收放,所述钢缆6远离所述绞盘的一端与所述医护训练舱7相连,四根所述钢缆6远离所述绞盘的一端分别连接于所述医护训练舱7的四个角上,所述第一伺服电机31、所述第二伺服电机32、所述第三伺服电机33和所述第四伺
服电机34均与所述控制器2通过数据线4电连接。本实用新型具体公开的医护人员六自由度摇摆训练平台通过控制器2、第一伺服电机31、第二伺服电机32、第三伺服电机33和第四伺服电机34的相互配合,可以实现医护训练舱7的六自由度摇摆运动;通过控制器2可以设置海浪、风、舰艇运动等参数,进而真实的模拟舰艇在海上的运动情况,使装置操作便捷,提高了装置的可控性和便捷性。
21.绞盘与医护训练舱7之间均设置有滑轮,所述滑轮的数量与绞盘相对应, 4个所述滑轮分别固定于第一支撑杆11和第二支撑杆12上,所述钢缆6在所述滑轮上滑动。滑轮选用转向滑轮5。框架1和所述医护训练舱可以根据实际应用情况进行大小的调整。还包括存储器,所述存储器与所述控制器2电连接,所述存储器内存储有海浪、风和/或舰艇运动的参数及对应参数的调节比例,所述控制器2通过设置具体参数进而模拟海上舰艇的具体摇摆情况。控制器2 通过无线传输模块与远程移动终端相连,所述远程移动终端可以对控制器2 进行设置。远程移动终端选用工控机,系统运行稳定,故障率低。钢缆6和所述医护训练舱7通过环扣连接。控制器2具有脉冲信号端子、方向信号端子、电流设定端子、单脉冲或双脉冲切换端子和细分设定端子,进而调节伺服电机的转动方向和转动速度,进而控制四根钢缆6的运动,实现医护训练舱7的六自由度摇摆运动。
22.在使用医护人员六自由度摇摆训练平台时,首先通过控制器2设置海浪、风和舰艇运动等参数,医护人员在医护训练舱7内部站定或坐定之后,启动控制器2,第一伺服电机31、第二伺服电机32、第三伺服电机33和第四伺服电机34根据控制器2的指令进行运动,通过绞盘和转向滑轮5按照运动指令控制钢缆6的长度,控制医护训练舱的六自由度摇摆运动。在训练过程中,可以实时更改控制器2的运动参数设置,可以让医护人员在不同舰艇摇摆情况下开展医护训练。训练结束,控制器2控制结束装置的摇摆运动,操作控制简单。
23.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。