1.本实用新型涉及车辆动态称重技术技术领域,尤其涉及一种车载动态称重垃圾桶挂桶机构。
背景技术:
2.为了进一步加强城市垃圾的精细化管理,实现垃圾源头车载称重的目标,现多在清运车辆上加装车载称重设备。现有的车载称重设备多为称重传感器配合挂桶构件的方式来实现称重。
3.现有车载称重设备所采用的称重传感器多为应变式传感器,在垃圾倾倒作业中,应变式传感器所称量的结果不稳定、误差大,难以满足动态称重的需求,而且挂桶构件难以满足市面上不同垃圾桶挂桶的需求,具有一定的局限性。为此,提出一种车载动态称重垃圾桶挂桶机构。
技术实现要素:
4.本实用新型为了解决现有车载称重设备称重误差大的问题,提供一种车载动态称重垃圾桶挂桶机构,通过对车载称重设备的合理设计,提高称重的准确度以及使用的便捷性。
5.为实现上述目的,本实用新型所采用的技术方案是:
6.一种车载动态称重垃圾桶挂桶机构,包括两组称重模块以及垃圾桶挑爪,每组所述称重模块包括带有称重传感器的底座以及设置在底座上的主体,所述主体内设置有直线轴承,所述直线轴承内滑动连接有直线光轴,所述直线光轴和称重传感器上下对应,直线光轴上设置有限位螺栓以限制直线光轴滑动;
7.所述垃圾桶挑爪包括杆部、套部和爪部,所述杆部通过所述套部分别和两组所述称重模块连接,套部套设在直线光轴上、且和直线光轴通过销钉连接,杆部上间隔设置有四个所述爪部,爪部和称重模块上下分布。
8.进一步地,所述主体内开设有阶梯通孔,主体和底座连接后、所述称重传感器置于阶梯通孔下方;
9.所述直线轴承置于所述阶梯通孔上方、且下端抵在阶梯通孔轴肩处,直线轴承通过顶丝和所述主体连接。
10.进一步地,所述直线光轴下端穿过直线轴承连接有所述限位螺栓,所述限位螺栓突出于直线光轴,限位螺栓置于阶梯通孔下方、且和阶梯通孔轴肩处存在间隔。
11.进一步地,所述直线轴承和限位螺栓上下分布,所述限位螺栓和阶梯通孔轴肩处的间距为1~2mm。
12.进一步地,所述主体上设置有安装孔,所述安装孔为阶梯孔;
13.所述直线光轴上端伸出主体开设有安装平面。
14.进一步地,所述杆部为板状,杆部下方两侧设置有所述套部,套部截面呈矩形、与
安装平面相适配合;
15.所述销钉穿设在套部和直线光轴之间,销钉上还设置有开口销。
16.进一步地,所述杆部上方间隔布设所述爪部,爪部截面呈倒“l”形;
17.相邻两个所述爪部的间距依次为85mm、80mm和85mm。
18.通过上述技术方案,本实用新型的有益效果是:
19.本实用新型结构设计合理,采用模块化设计,每个垃圾桶挂桶机构使用一个垃圾桶挑爪和两个称重模块组成一套的结构模块,可实现任意数量挂桶工位的安装及称重,进而满足垃圾桶的挂上、取下的同时,又具备动态称重功能。
20.本实用新型通过对称重模块结构的调整,达到拆装方便、维护简便、运行稳定的目的,有效解决了车辆动态运行中的残余应力直接传到称重传感器上,导致称重数据不准确的问题;垃圾桶挑爪和称重模块采用销钉连接,连接强度可靠,同时销钉可以旋转活动释放其他方向应力,满足挂桶结构功能和动态称重功能。
21.本实用新型相邻两个所述爪部的间距依次为85mm、80mm和85mm,该尺寸能避开市面多种垃圾桶的加强筋位置和尺寸,满足多种垃圾桶的挂桶功能。
附图说明
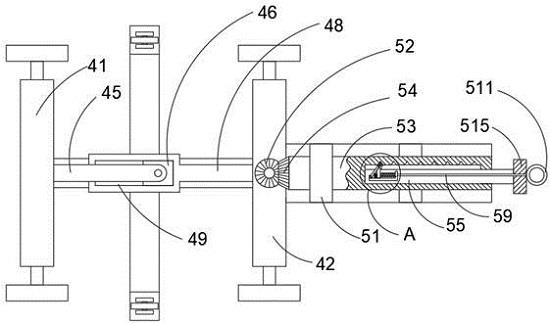
22.图1是本实用新型一种车载动态称重垃圾桶挂桶机构的主视图。
23.图2是本实用新型一种车载动态称重垃圾桶挂桶机构的图1中a
‑
a向剖视图。
24.图3是本实用新型一种车载动态称重垃圾桶挂桶机构的图2中b处放大示意图。
25.图4是本实用新型一种车载动态称重垃圾桶挂桶机构的图2中c
‑
c向剖视图。
26.图5是本实用新型一种车载动态称重垃圾桶挂桶机构的爆炸视图。
27.附图中标号为:1为称重传感器,2为底座,3为主体,4为直线轴承,5为直线光轴,6为限位螺栓,7为杆部,8为套部,9为爪部,10为销钉,11为阶梯通孔,12为顶丝,13为安装孔,14为安装平面,15为开口销。
具体实施方式
28.下面结合附图对本实用新型的具体实施方式做详细描述:
29.如图1~图5所示,一种车载动态称重垃圾桶挂桶机构,包括两组称重模块以及垃圾桶挑爪,每组所述称重模块包括带有称重传感器1的底座2以及设置在底座2上的主体3,所述底座2和主体3采用螺栓连接方式安装。
30.本实施例中,所述称重传感器1和底座2螺栓连接,称重传感器1采用半导体式称重传感器来进行称重,所述主体3内设置有直线轴承4。
31.为了便于直线轴承4的安装,所述主体3内开设有阶梯通孔11,所述直线轴承4置于所述阶梯通孔11上方、且下端抵在阶梯通孔11轴肩处,直线轴承4上平面和主体3上平面齐平,直线轴承4通过顶丝12和所述主体3连接,在顶丝12的限制作用下,可保证直线轴承4位置的固定,避免其上下移动。
32.本实施例中,所述直线轴承4内上下滑动连接有直线光轴5,所述直线光轴5和称重传感器1上下对应,在主体3和底座2连接安装后、所述称重传感器1也置于阶梯通孔11下方,进而形成一个封闭的称重空间,在此称重空间内通过直线光轴5下移、抵在称重传感器1从
而进行称重。
33.在直线光轴5和直线轴承4安装时,直线光轴5穿过直线轴承4,此时直线轴承4的多排滚动钢珠和直线光轴5接触,实现较低摩擦力的接触和运行,以达到剔除非垂直方向的干扰应力的目的,即通过直线轴承4滚动钢珠低摩擦力的运动副消除车辆动态运行中对称重传感器1的应力干扰;
34.当直线光轴5受到压力时,保证其所承载的重量完全正压到称重传感器1上,有效解决了车辆动态运行中的残余应力直接传到称重传感器1上,导致称重数据不准确的问题,从而提高称重结果的准确性。
35.为了对直线光轴5的滑动进行限制,所述直线光轴5上设置有限位螺栓6以限制直线光轴5滑动,具体为,所述直线光轴5下端穿过直线轴承4连接有所述限位螺栓6,所述限位螺栓6突出于直线光轴5,限位螺栓6置于阶梯通孔11下方、且和阶梯通孔11轴肩处存在间隔。
36.本实施例中,所述直线轴承4和限位螺栓6上下分布,所述限位螺栓6和阶梯通孔11轴肩处的间距为i,i为1~2mm,进而保证了直线光轴5的1~2mm的微量运动距离,以此来保证车辆动态运行中不损伤称重传感器1。
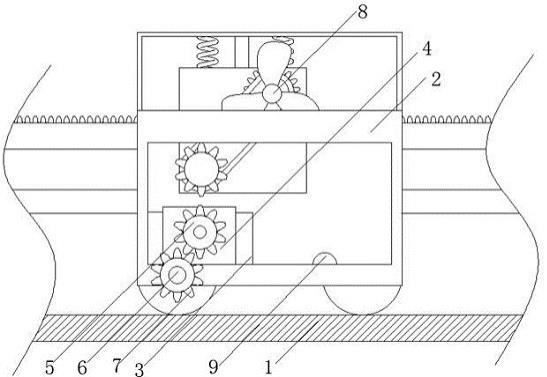
37.本实施例中,所述垃圾桶挑爪包括杆部7、套部8和爪部9,所述杆部7为板状,杆部7通过所述套部8分别和两组所述称重模块连接,套部8套设在直线光轴5上、且和直线光轴5通过销钉10连接。
38.具体的,所述直线光轴5上端伸出主体3开设有安装平面14,所述杆部7下方两侧设置有所述套部8,套部8截面呈矩形、与安装平面14相适配合,安装时,所述销钉10穿设在套部8和直线光轴5之间,销钉10上还设置有开口销15;
39.在开口销15的作用下,防止销钉10销钉10窜动、避免脱落,垃圾桶挑爪通过销钉10和称重模块连接在一起,连接强度可靠,同时销钉10可以旋转活动释放其他方向应力,满足挂桶结构功能和动态称重功能。
40.为了便于支撑垃圾桶,所述杆部7上间隔设置有四个所述爪部9,爪部9和称重模块上下分布,具体的,所述杆部7上方间隔布设所述爪部9,爪部9截面呈倒“l”形,相邻两个所述爪部9的间距依次为l1,l2和l3;
41.本实施例中,l1为85mm,l2为80mm,l3为85mm,进而能避开市面多种垃圾桶的加强筋位置和尺寸,满足多种垃圾桶的挂桶功能。
42.本实用新型采用模块化设计,每个垃圾桶挂桶机构均采用一个垃圾桶挑爪和两个称重模块组成配套的结构模块,可实现任意数量挂桶工位的安装及称重;
43.为了便于本实用新型的安装,所述主体3上开设有安装孔13,所述安装孔13为阶梯孔,通过螺栓穿过安装孔13与相应的车载部件连接,进而实现安装,安装简单可靠。
44.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。