1.本实用新型涉及一种运动控制装置,尤其涉及一种相控阵天线运动控制装置。
背景技术:
2.低轨通信卫星具有传输延时短、路径损耗小、通信速率高等特点,低轨卫星通信相比静止卫星通信具有较大优势,但是低轨卫星相对地面来说为非静止,且相对地面运动速度大,需要地面通信设备的天线具备快速、实时跟踪卫星的能力,同时为了适应车载、船载、机载等动态载体对卫星通信的需要,地面通信设备还需对载体姿态变化进行补偿以确保天线保持对准卫星。当前的动中通天线一般是基于俯仰
‑
方位型转台的抛物面天线,而转台运动为机械运动,存在跟踪速度慢、有天顶盲区等缺点,当载体姿态变化较大时,可能还会存在扫描盲区。而相控阵天线通过调节相位即可实现天线指向跟踪,速度非常快,指向切换间隔微秒级到毫秒级,但是相控阵天线的调节范围有限,不适用于进行低轨卫星大范围的移动的跟踪。因此,现有技术有待改进。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种相控阵天线运动控制装置,结合相控阵天线和传统动中通天线的机械运动,实现无扫描盲区的快速跟踪。
4.本实用新型为解决上述技术问题而采用的技术方案是提供一种相控阵天线运动控制装置,包括相控阵天线主体和机械执行单元,所述相控阵天线主体安装在机械执行单元上;所述相控阵天线主体包括天馈单元、控制单元和第一运动传感单元;所述机械执行单元包括天线安装结构和底座,所述底座上设置有第二运动传感单元;所述相控阵天线主体通过天线安装结构安装固定在底座上,所述底座设置在移动载体上,所述移动载体为车、船或者飞机;所述天馈单元、第一运动传感单元、第二运动传感单元、机械执行单元与控制单元电连接。
5.进一步的,所述天馈单元用于发射和接收对星通信的电磁波,所述控制单元通过天馈单元接收的电磁能量信息控制机械执行单元调整相控阵天线主体的姿态和方位,同时控制天馈单元调节相位,进一步调节相控阵天线主体的指向;所述第一运动传感单元和第二运动传感单元反馈相控阵天线主体和移动载体的实时状态信息到控制单元。
6.进一步的,所述第一运动传感单元和第二运动传感单元都包括三轴加速度计、三轴磁强计和三轴陀螺仪;所述第一运动传感单元检测相控阵天线主体的实时姿态和方位信息,所述第二运动传感单元检测移动载体的实时姿态和方位信息。
7.进一步的,所述机械执行单元的天线安装结构包括小型俯仰
‑
方位型转台,所述天线安装结构带动相控阵天线主体相对于底座和移动载体进行俯仰运动和水平方位的旋转运动;所述相控阵天线主体俯仰运动角度范围为0
‑
90
°
,所述相控阵天线主体水平方位的旋转运动的角度范围为0
‑
360
°
。
8.本实用新型对比现有技术有如下的有益效果:本实用新型提供的相控阵天线运动
控制装置,通过机械执行单元的机械调节结合相控阵天线主体的相位调节实现无盲区扫描;相控阵天线主体的电扫描速度快保证跟踪速度;通过第一运动传感单元反馈相控阵天线主体的俯仰角度和方位角度,实现机械调节的闭环控制;通过第二运动传感单元将测量的移动载体的实时姿态和方位信息进行相控阵天线主体的姿态补偿,保证了跟踪的准确性;信号捕获的全空域扫描方法和信号跟踪的多次逼近扫描方法,保证了跟踪的实时性和准确性。
附图说明
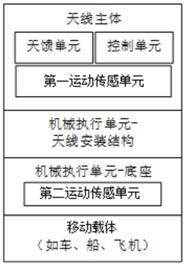
9.图1为本实用新型实施例中相控阵天线运动控制装置架构图;
10.图2为本实用新型实施例中空域划分和扫描范围示意图;
11.图3为本实用新型实施例中旋转遍历电扫描示意图;
12.图4为本实用新型实施例中蛇形逐列遍历电扫描示意图;
13.图5为本实用新型实施例中多次逼近扫描示意图。
具体实施方式
14.下面结合附图和实施例对本实用新型作进一步的描述。
15.图1为本实用新型实施例中相控阵天线运动控制装置架构图。
16.请参见图1,本实用新型实施例的相控阵天线运动控制装置,包括相控阵天线主体和机械执行单元,所述相控阵天线主体安装在机械执行单元上;所述相控阵天线主体包括天馈单元、控制单元和第一运动传感单元;所述机械执行单元包括天线安装结构和底座,所述底座上设置有第二运动传感单元;所述相控阵天线主体通过天线安装结构安装固定在底座上,所述底座设置在移动载体上,所述移动载体为车、船或者飞机;所述天馈单元、第一运动传感单元、第二运动传感单元、机械执行单元与控制单元电连接。
17.具体的,本实用新型实施例的相控阵天线运动控制装置,天馈单元用于发射和接收对星通信的电磁波,所述控制单元通过天馈单元接收的电磁能量信息控制机械执行单元调整相控阵天线主体的姿态和方位,同时控制天馈单元调节相位,进一步调节相控阵天线主体的指向;所述第一运动传感单元和第二运动传感单元反馈相控阵天线主体和移动载体的实时状态信息到控制单元;所述第一运动传感单元和第二运动传感单元都包括三轴加速度计、三轴磁强计和三轴陀螺仪;所述第一运动传感单元检测相控阵天线主体的实时姿态和方位信息,所述第二运动传感单元检测移动载体的实时姿态和方位信息。
18.优选的,本实用新型实施例的相控阵天线运动控制装置,机械执行单元的天线安装结构包括小型俯仰
‑
方位型转台,所述天线安装结构带动相控阵天线主体相对于底座和移动载体进行俯仰运动和水平方位的旋转运动;所述相控阵天线主体俯仰运动角度范围为0
‑
90
°
,所述相控阵天线主体水平方位的旋转运动的角度范围为0
‑
360
°
。
19.本实用新型实施例的相控阵天线运动控制装置,工作过程如下:
20.s1:全空域扫描搜索卫星信号,记录信号能量最强方位,即为卫星的方位;
21.s2:控制单元控制机械执行单元调整相控阵天线主体的姿态和方位,使得最强方位落入相控阵天线电扫描范围;
22.s3:控制单位对天馈系统进行相位控制,使天线波束对准卫星的方位,实现卫星信
号捕获;
23.s4:随着卫星和移动载体的运动,采用多次逼近扫描对前一时刻的卫星方位的附近空域进行扫描,协调控制机械执行单元或天线相位,使得相控阵天线波束始终指向电磁能量最强信号方位,实现卫星信号跟踪和锁定。
24.相控阵天线本体扫描方式包括电扫描和机械扫描。电扫描是指天馈单元通过调节相位改变天线指向,对电扫描区域的电磁能量的扫描;所述机械扫描是指机械执行单元通过调节俯仰角和方位角度改变天线指向,对附近空域空间的扫描;所述天馈单元进行电扫描的范围为
±
60
°
的圆锥形空域,电扫描区域为圆锥形空域投射到附近空域的圆形区域,电扫描区域为一个电磁波波束覆盖的范围,其范围大小由相控阵天线本体的波束宽度决定。在电扫描盲区,机械执行机构输出额外的俯仰角、方位角进行调节,从而进行全空域扫描。
25.全空域扫描是将空域划分成多个方格分区,其中大圆圈代表附近空域,小圆圈代表电扫描区域,全空域扫描具体包括:在附近空域内对位于电扫描区域内的方格分区进行电扫描;机械执行单元调节俯仰角度和方位角度进行机械扫描;在图2中实线小圆圈范围内,直接对每个方格进行电扫描;在电扫描盲区图2中小圆圈范围外先由机械执行单元输出一个的姿态角和方位角,使盲区进入电扫描范围内,如图2中虚线小圆圈,然后对范围内的每个方格进行电扫描,机械执行单元输出了一个姿态角和方位角后,原来的盲区变为电扫描的可达范围;重复电扫描和机械扫描直到完成附近空域所有方格分区的扫描控制单元对扫描得到的电磁能量进行比较,能量值最大的方格为信号最强方格,即为卫星所在方位,完成信号捕获。
26.机械扫描配合电扫描对附近空域的每个方格进行遍历时,遍历的方式为从中心点向外旋转的方式,或者为蛇形逐列/逐行的方式,如图3或图4的有向线方向进行。
27.在信号捕获阶段,移动载体发生抖动、运动方向变化或者姿态变化时,在全空域扫描过程中进行相控阵天线主体的姿态补偿,第二运动传感单元将测量的移动载体的实时姿态和方位信息传输给控制单元,控制单元计算得到相控阵天线主体需要补偿的姿态角和方位角,并通过天馈单元进行相位调整对相控阵本体的指向进行补偿,当控制单元计算的补偿姿态角和方位角超出电扫描范围时,由机械执行单元调节俯仰角度和方位角度对超出的部分进行补偿。
28.捕获信号后,由于载体及卫星的运动,相控阵天线本体的波束仍然停留在前一时刻卫星的方向,从而偏离了实际的卫星,相控阵天线本体随后对附近空域进行多次逼近扫描,并指向信号最大值,以实现信号跟踪。
29.请参见图5,本实用新型实施例的相控阵天线运动控制装置,实线大圆圈代表附近空域,虚线小圆圈代表相控阵天线本体的波束覆盖范围,虚线五角星代表前一时刻卫星,实线五角星代表当前时刻卫星。相控阵天线本体将在附近空域进行一次电扫描,例如,如图5中上、下、左、右顺序进行信号能量探测,将探测到的电磁能量送至控制单元进行判断,可以进一步锁定卫星的方位,如图5中实线小圆圈所示。以此方式进行多次电扫描就可逐步缩小范围并得到当前时刻卫星的方向。
30.多次逼近扫描具体包括:
31.s41:随着卫星和移动载体的运动,为连续跟踪卫星信号,对前一时刻的卫星方位作为中心点的附近空域进行电扫描,附近空域的范围大小的根据卫星运动速度和载体运动
速度确定;
32.s42:对附近空域所确定的圆形区域的上、下、左、右四个方向各进行一次电扫描;
33.s43:控制单元对扫描得到的电磁能量进行比较,确认能量值最大的方位,并将该方位作为新的中心点,并对其附近空域进行电扫描;
34.s44:当附近空域超出电扫描范围时,机械执行单元调节俯仰角度和方位角度改变相控阵天线主体姿态,使附近空域全部落入电扫描范围;
35.s45:重复步骤s42
‑
s44直到找到能量最大的方位,即为卫星当前时刻所在方位。
36.综上所述,本实用新型实施例的相控阵天线运动控制装置,通过机械执行单元的机械调节结合相控阵天线主体的相位调节实现无盲区扫描;相控阵天线主体的电扫描速度快保证跟踪速度;通过第一运动传感单元反馈相控阵天线主体的俯仰角度和方位角度,实现机械调节的闭环控制;通过第二运动传感单元将测量的移动载体的实时姿态和方位信息进行相控阵天线主体的姿态补偿;保证了跟踪的准确性;信号捕获的全空域扫描方法和信号跟踪的多次逼近扫描方法,保证了跟踪的实时性和准确性。
37.虽然本实用新型已以较佳实施例揭示如上,然其并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型的精神和范围内,当可作些许的修改和完善,因此本实用新型的保护范围当以权利要求书所界定的为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。