1.本技术涉及焊接加工设备的领域,尤其是涉及一种高精度五轴激光焊接机床。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法。激光焊接是激光材料加工技术应用的重要方面之一。20世纪70年代主要用于焊接薄壁材料和低速焊接,焊接过程属热传导型,即激光辐射加热工件表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、峰值功率和重复频率等参数,使工件熔化,形成特定的熔池。由于其独特的优点,已成功应用于微、小型零件的精密焊接中。
3.相关公告号为cn209681402u的中国实用新型专利,其公开了一种三轴柔性点焊装置,包括焊枪,包括焊枪座、静电极、动电极、动电极驱动机构和变压器,焊枪座包括左侧板和右侧板,左侧板和右侧板通过连接件连接为一个整体式的焊枪座,左侧板和右侧板之间留有间隔,静电极嵌入间隔并与静电极安装位固定连接,动电极驱动机构嵌入间隔并与动电极驱动机构安装位连接,动电极驱动机构能够驱动动电极往复运动,并与静电极配合实现焊接;变压器嵌入间隔并与变压器安装位固定连接,静电极和动电极分别与变压器的两电极连接;三轴驱动机构与焊枪连接,包括x向驱动单元、y向驱动单元和z向驱动单元。其能够保证焊接工位焊接要求的同时,提升焊接的效率和稳定性。
4.针对上述中的相关技术,发明人认为相关的焊接装置仅能实现三轴直线联动,难以进行复杂曲面的焊接作业,需要多次装夹工件,焊接加工精度较低。
技术实现要素:
5.为了相关的焊接装置难以进行复杂曲面的焊接作业,焊接加工精度较低的问题,本技术提供一种高精度五轴激光焊接机床。
6.本技术提供的一种高精度五轴激光焊接机床采用如下的技术方案:
7.一种高精度五轴激光焊接机床,包括安装底座、三轴立式机床、二轴旋转变位器、工作平台、控制器以及用于对工件进行焊接的激光焊接头,所述三轴立式机床和工作平台均固定在安装底座上,所述三轴立式机床内设置有三轴移动机构,所述三轴移动机构的输出端与激光焊接头相对固定,所述三轴移动机构用于带动激光焊接头沿正交坐标系中的x轴、y轴和z轴方向上移动,所述工作平台位于三轴立式机床的一侧,所述二轴旋转变位器固定在工作平台上,所述二轴旋转变位器用于带动工件沿平行于x轴、y轴和z轴中任意两轴方向转动,所述二轴旋转变位器、三轴移动机构以及激光焊接头均与控制器电性连接。
8.通过采用上述技术方案,待加工工件固定在二轴旋转变位器上,根据工件上的待焊接的位置,二轴旋转变位器将工件转动到适宜位置,随后,控制器控制三轴移动机构启动,三轴移动机构带动激光焊接头沿x轴、y轴或z轴方向移动,使得激光焊接头移动到工件的待焊接位置,并对其进行焊接作业。通过三轴移动机构和二轴旋转变位器的相互配合,使得该焊接机床能够完成各类三维曲面结构的激光焊接加工作业,有效提高工件的焊接加工
精度。
9.可选的,所述三轴立式机床包括x轴安装座、y轴安装座和z轴安装座和焊接安装座,所述三轴移动机构包括x轴移动机构、y轴移动机构以及z轴移动机构,所述x轴移动机构固定在x轴安装座上,所述x轴移动机构与y轴安装座连接,用于带动y轴安装座沿x轴方向上移动;所述y轴移动机构固定在y轴安装座上,所述y轴安装座与z轴安装座连接,用于带动z轴安装座沿y轴方向上移动;所述z轴移动机构固定在z轴安装座上,所述z轴移动机构与焊接安装座连接,用于带动焊接安装座沿z轴方向移动,所述激光焊接头固定设置在焊接安装座上。
10.通过采用上述技术方案,激光焊接头通过x轴移动机构、y轴移动机构以及z轴移动机构实现了正交坐标系内的灵活移动,使得激光焊接头能够准确的移动到工件的待焊接的位置,从而保障激光焊接头的焊接加工精度和可靠性。
11.可选的,所述三轴立式机床上设置有第一柔性防护罩,所述第一柔性防护罩覆盖在三轴移动机构的外侧。
12.通过采用上述技术方案,第一柔性防护罩对三轴移动机构起到保护作用,能够有效阻挡外界灰尘、焊接飞溅物等杂物,保障三轴移动机构的良好运行。
13.可选的,所述激光焊接头和焊接安装座之间设置有焊接精调装置,所述焊接精调装置包括第一安装座、第二安装座、固定设置在第一安装座上的第一精调机构以及固定在第二安装座上的第二精调机构,所述第一安装座固定在焊接安装座上,所述第一精调机构与第二安装座连接,用于带动第二安装座沿平行于x轴方向上移动,所述第二精调机构与激光焊接头连接,用于带动激光焊接头沿平行于z轴方向上移动,所述焊接精调装置与控制器电性连接。
14.通过采用上述技术方案,三轴移动机构将激光焊接头移动到工件待焊接的位置处时,进行激光焊接头位置的初步调节;随后焊接精调装置通过第一精调机构和第二精调机构对激光焊接头在x轴和z轴方向上进行进一步的调节,从而有效提高激光焊接头的焊接加工精度和质量。
15.可选的,所述第一安装座和第二安装座上均设置有第二柔性防护罩,各所述第二柔性防护罩覆盖在相应的第一精调机构和第二精调机构的外侧。
16.通过采用上述技术方案,第二柔性防护罩对第一精调机构和第二精调机构起到保护作用,能够有效阻挡外界灰尘、焊接飞溅物等杂物,保障焊接精调装置的良好运行。
17.可选的,所述激光焊接头上固定设置有激光追踪器,所述激光追踪器与控制器电性连接。
18.通过采用上述技术方案,激光追踪器用于对工件在空间中的运动进行跟踪并实时测量待焊接位置的空间三维坐标,并将信号反馈到控制器,从而控制器通过三轴移动机构和二轴旋转机构将激光焊接头移动到相应位置进行焊接,使得焊接加工的自动化程度更高,焊接作业简便且有效提高焊接加工精度。
19.可选的,所述激光焊接头的一侧设置有若干焊接保护气管,所述焊接保护气管远离激光焊接头的一端连通有供气装置。
20.通过采用上述技术方案,供气装置通过焊接保护气管对激光焊接作业时提供合适的焊接保护气体,从而提高焊缝质量和焊接速度,有效降低焊接飞溅量和焊接烟尘。
21.可选的,所述安装底座上开设有若干叉车搬运孔。
22.通过采用上述技术方案,通过叉车搬运孔可以使用叉车对该焊接机床进行搬运输送,提高焊接机床的搬运移动的便利性。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过设置三轴移动机构和二轴旋转变位器,使得该焊接机床能够完成各类三维曲面结构的激光焊接加工作业,有效提高工件的焊接加工精度;
25.2.通过设置第一柔性防护罩,对三轴移动机构起到保护作用,能够有效阻挡外界灰尘、焊接飞溅物等杂物,保障三轴移动机构的良好运行;
26.3.通过设置焊接精调装置,实现激光焊接头位置的进一步精度调节,从而有效提高激光焊接头的焊接加工精度和质量。
附图说明
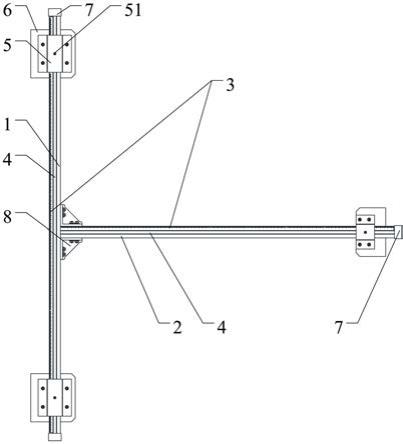
27.图1是本技术实施例的一种高精度五轴激光焊接机床的整体结构示意图。
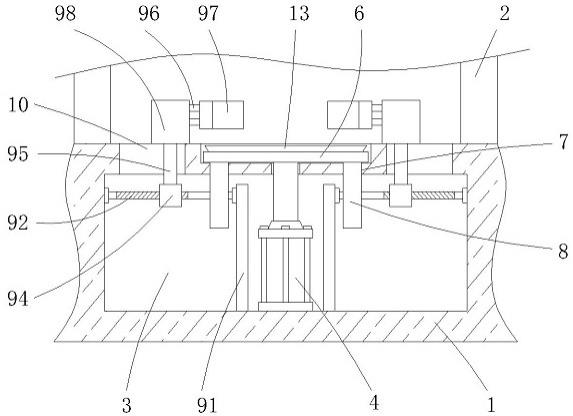
28.图2是本技术实施例的三轴立式机床的整体结构示意图。
29.图3是本技术实施例中焊接精调装置的局部结构爆炸图。
30.附图标记说明:1、安装底座;11、叉车搬运孔;2、三轴立式机床;21、x轴安装座;211、安装槽;22、y轴安装座;23、z轴安装座;24、焊接安装座;25、第一柔性防护罩;3、三轴移动机构;31、x轴移动机构;311、移动丝杆;312、移动电机;313、移动螺母;314、直线滑轨;315、滑块;32、y轴移动机构;33、z轴移动机构;4、焊接精调装置;41、第一安装座;411、传动槽;42、第二安装座;43、第一精调机构;431、精调丝杆;432、精调螺母;433、精调电机;434、线性导轨;435、滑动块;44、第二精调机构;45、第二柔性防护罩;5、激光焊接头;51、安装支架;52、焊接保护气管;53、激光追踪器;6、二轴旋转变位器;61、转动底座;62、变位机旋转头;63、旋转盘;7、工作平台;71、t形槽;8、尾顶;81、锁紧杆。
具体实施方式
31.以下结合附图1
‑
3对本技术作进一步详细说明。
32.本技术实施例公开一种高精度五轴激光焊接机床。参照图1,一种高精度五轴激光焊接机床包括安装底座1、三轴立式机床2、二轴旋转变位器6、工作平台7、控制器以及用于对工件进行焊接的激光焊接头5。其中,三轴立式机床2和工作平台7均固定在安装底座1上,安装底座1上开设有若干叉车搬运孔11,以方便该焊接机床的移动运输。工作平台7位于三轴立式机床2的一侧,三轴立式机床2内安装有三轴移动机构3,激光焊接头5与三轴移动机构3连接,三轴移动机构3用于带动激光焊接头5沿正交坐标系中的x轴、y轴和z轴方向上移动。二轴旋转变位器6安装在工作平台7的一端,二轴旋转变位器6用于带动工件沿平行于x轴、y轴和z轴中任意两轴方向转动,二轴旋转变位器6、三轴移动机构3以及激光焊接头5均与控制器电性连接。本实施例中,二轴旋转变位器6用于带动工件沿平行与x轴和y轴的方向转动;控制器采用keba运动控制器进行控制。在进行工件加工时,将工件固定在二轴旋转变位器6上,根据工件上的待焊接的位置,二轴旋转变位器6将工件转动到适宜位置,随后,控制器控制三轴移动机构3启动,三轴移动机构3带动激光焊接头5移动到工件的待焊接位置,并对其进行焊接作业。通过三轴移动机构3和二轴旋转变位器6的相互配合,使得该焊接机
床能够完成各类三维曲面结构的激光焊接加工作业,有效提高工件的焊接加工精度。
33.参照图1和图2,三轴立式机床2包括x轴安装座21、y轴安装座22和z轴安装座23和焊接安装座24,三轴移动机构3包括x轴移动机构31、y轴移动机构32以及z轴移动机构33。x轴安装座21焊接固定在安装底座1上,x轴移动机构31安装在x轴安装座21上,且x轴移动机构31与y轴安装座22连接,用于带动y轴安装座22沿x轴方向上移动;y轴移动机构32安装在y轴安装座22上,y轴安装座22与z轴安装座23连接,用于带动z轴安装座23沿y轴方向上移动;z轴移动机构33安装在z轴安装座23上,z轴移动机构33与焊接安装座24连接,用于带动焊接安装座24沿z轴方向移动。激光焊接头5相对固定在焊接安装座24上。本实施例中,x轴移动机构31的移动形成为1200mm,y轴的移动行程为400mm,z轴的移动行程为1000mm,通过x轴移动机构31、y轴移动机构32以及z轴移动机构33,实现激光焊接头5在各行程范围区域内的灵活移动,使得激光焊接头5能够准确的移动到工件的待焊接的位置。
34.参照图1和图2,x轴移动机构31包括移动丝杆311、与移动丝杆311相适配的移动螺母313以及用于驱动移动丝杆311转动的移动电机312。x轴安装座21靠近y轴安装座22的端面上开设有用于安装x轴移动机构31的安装槽211,移动丝杆311位于安装槽211内且移动丝杆311轴向的两端与x轴安装座21转动连接,移动丝杆311轴向的一端穿出x轴安装座21并与移动电机312的输出轴同轴固定,移动电机312通过螺栓固定在x轴安装座21上,移动螺母313焊接固定在y轴安装座22上,y轴安装座22与x轴安装座21之间滑动连接。当移动电机312启动并带动移动丝杆311转动,移动丝杆311通过移动螺母313带动y轴安装座22沿x轴方向移动。x轴移动机构31还包括直线滑轨314以及与直线滑轨314相适配的滑块315,直线滑轨314位于安装槽211内,直线滑轨314长度方向的两端与x轴安装座21固定连接,滑块315固定在y轴安装座22的底端,y轴安装座22通过滑块315和直线滑轨314与x轴安装座21滑动连接。滑块315和直线滑轨314对y轴安装座22的移动起到移动导向作用,继而使得激光焊接头5在x轴方向上的移动更加精确稳定。而y轴移动机构32与z轴移动机构33均与x轴移动机构31的结构相同,因此,本实施例中,对于y轴移动机构32和z轴移动机构33不作过多赘述。
35.参照图1和图2,为了保障三轴移动机构3的良好运行,在x轴安装座21、y轴安装座22以及z轴安装座23上均安装有第一柔性防护罩25,本实施例中,该第一柔性防护罩25采用防尘风琴罩。各第一柔性防护罩25均覆盖于相应的x轴移动机构31、y轴移动机构32以及z轴移动机构33的外侧,对外界灰尘、焊接飞溅物等杂物进行阻挡。
36.参照图2和图3,激光焊接头5和焊接安装座24之间设置有焊接精调装置4,用于提高激光焊接头5的焊接作业精度。焊接精调装置4与控制器电性连接,焊接精调装置4包括第一安装座41、第二安装座42、第一精调机构43以及第二精调机构44。第一安装座41通过螺栓固定在激光焊接头5的端部,第一精调机构43安装在第一安装座41上,第一精调机构43与第二安装座42连接,用于带动第二安装座42沿平行于x轴方向上移动;第二精调机构44安装在第二安装座42上,第二精调机构44与与激光焊接头5连接,用于带动激光焊接头5沿平行于z轴方向上移动。三轴移动机构3对激光焊接头5位置的初步调节,随后,焊接精调装置4通过第一精调机构43和第二精调机构44对激光焊接头5在x轴和z轴方向上进行进一步的调节,从而有效提高激光焊接头5的焊接加工精度和质量。第一安装座41和第二安装座42上均安装有第二柔性防护罩45,本实施例中,该第二柔性防护罩45采用防尘风琴罩。各第二柔性防护罩45覆盖在相应的第一精调机构43和第二精调机构44的外侧,用于对外界灰尘、焊接飞
溅等杂物进行阻挡,以保障焊接精调装置4的良好运行。
37.参照图2和图3,第一精调机构43包括精调丝杆431、与精调丝杆431相适配的精调螺母432以及用于驱动精调丝杆431转动的精调电机433。第一安装座41远离焊接安装座24的一端开设有用于安装第一精调机构43的传动槽411,精调丝杆431转动连接与传动槽411内,精调丝杆431轴向的一端穿出第一安装座41并与精调电机433的输出轴同轴固定。精调电机433通过螺栓固定在第一安装座41上。精调螺母432焊接固定在第二安装座42上,第二安装座42和第一安装座41滑动连接,当精调电机433启动并带动精调丝杆431转动,精调丝杆431通过精调螺母432带动第二安装座42在平行于x轴方向上移动。第一精调机构43还包括线性导轨434以及与线性导轨434相适配的滑动块435,线性导轨434固定在传动槽411内,线性导轨434的长度方向与精调丝杆431的轴向相平行,滑动块435固定在第二安装座42上,第二安装座42通过滑动块435和线性导轨434与第一安装座41滑动连接,滑动块435和线性导轨434对第二安装座42的移动起到导向的作用,从而使得激光焊接头5的移动更加稳定精确。第二精调机构44与第一精调机构43的结构相同,故本实施例中不作过多赘述。
38.参照图1和图3,激光焊接头5和第二精调机构44之间设置有安装支架51,激光焊接头5通过安装支架51与第二精调机构44连接固定,激光焊接头5上固定有激光追踪器53,本实施例中,激光追踪器53采用施努卡焊接激光跟踪器。激光追踪器53用于对工件在空间中的运动进行跟踪并实时测量待焊接位置的空间三维坐标,并将信号反馈到控制器,从而控制器通过三轴移动机构3和二轴旋转变位器6将激光焊接头5移动到相应位置进行焊接,使得焊接精度更高。安装支架51上安装有若干焊接保护气管52,焊接保护气管52位于激光焊接头5的一侧,焊接保护气管52远离激光焊接头5的一端固定有供气装置(图中未示出),为焊接作业提供保护气体,提高焊接质量。
39.参照图1,二轴旋转变位器6包括转动底座61、变位机旋转头62以及旋转盘63,变位机旋转头62转动连接于转动底座61上,转动底座61与变位机旋转头62的转动轴线与y轴相平行,旋转盘63转动连接于变位机旋转头62上,变位机旋转头62与旋转盘63的转动轴线与x轴相平行,本实施例中,该二轴旋转变位器6采用无锡凌世达bwj001型二轴旋转变位器6。二轴旋转变位器6为现有的相关技术,本实施例中故不作赘述。在进行工件的焊接加工时,将工件固定在旋转盘63上,变位机旋转头62和转动底座61带动工件在平行与x轴和y轴方向上转动。
40.参照图1,工作平台7上开设有若干相互平行的t形槽71,工作平台7上滑动连接有尾顶8,尾顶8与二轴旋转变位器6相对设置,尾顶8的底部固定有与t形槽71相适配的t形块,尾顶8通过t形块与工作平台7滑动连接,当待加工的工件在x轴方向上转动时,尾顶8用于顶紧工件,使得工件的转动更加稳定。尾顶8上螺纹连接有锁紧杆81,锁紧杆81与工作平台7相垂直,当尾顶8移动到需要的位置后,通过旋紧锁紧杆81,使得锁紧杆81与工作平台7抵接,从而将尾顶8和工作平台7进行相对固定。
41.本技术实施例一种高精度五轴激光焊接机床的实施原理为:待加工工件固定在二轴旋转变位器6上,根据工件上的待焊接的位置,二轴旋转变位器6将工件转动到适宜位置,随后,控制器控制三轴移动机构3启动,三轴移动机构3带动激光焊接头5沿x轴、y轴或z轴方向移动,使得激光焊接头5移动到工件的待焊接位置,对激光焊接头5进行初步的位置调整。之后,焊接精调装置4通过第一精调机构43和第二精调机构44对激光焊接头5在x轴和z轴方
向上进行进一步的调节,之后,激光焊接头5对工件进行焊接。通过三轴移动机构3、二轴旋转变位器6以及焊接精调装置4的相互配合,使得该焊接机床能够完成各类三维曲面结构的激光焊接加工作业,有效提高工件的焊接加工精度。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。