1.本实用新型公开了一种机械臂防松锁紧机构、机械臂和车轮生产线。
背景技术:
2.这里的陈述仅提供与本实用新型相关的背景技术,而不必然地构成现有技术。
3.随着现代信息技术的发展,自动化设备越来越广泛的应用到生产实践当中。车轮生产作业中,制动盘自动化安装生产线被引入进来,机械臂又是流水线作业中最重要的部分。其中,广州地铁、e27、e28、标准动车组车轮机械臂主要承担对应车型车轮加工过程中的吊运工作。
4.车轮在机械臂吊运的过程中,通过电机带动丝杠旋转将旋转运动转换为直线运动实现机械臂的夹紧和松开,而此方式夹取车轮运转时存在一定的安全隐患,例如由于机械结构的损坏或者操作人员误碰操作导致机械臂松开车轮掉落而发生安全事故,造成人员伤亡公司财产损失。
技术实现要素:
5.针对现有技术存在的不足,本实用新型的第一发明目的是提供一种机械臂防松锁紧机构,该装置应分别从机械结构和自动化控制两个方面考虑,使该锁紧装置既能实现机械结构上的锁紧,又能实现自动化控制上对电机的锁紧。
6.本实用新型的第二发明目的是提供一种机械臂。
7.本实用新型的第三发明目的是提供一种车轮生产线。
8.为了实现上述目的,本实用新型是通过如下的技术方案来实现:
9.第一方面,本实用新型的实施例提供了一种机械臂防松锁紧机构,包括驱动杆、连杆组件、第一定位件、第二定位件、距离传感器、控制单元;
10.所述的连杆组件一端与驱动杆相连,另一端与第一定位件相连,连杆组件将驱动杆的旋转运动转换成第一定位件的上下移动;第二定位件固定在第一定位件上且随第一定位件上下移动;所述的距离传感器与所述控制单元相连,距离传感器用于检测第二定位件的位置,控制单元根据第二定位件的位置控制机械臂的电机。
11.作为进一步的技术方案,还包括指示灯,指示灯与控制单元相连,用于显示机械臂是否锁紧。
12.作为进一步的技术方案,还包括门碰装置,所述的门碰装置设置在驱动杆旋转的极限位置。
13.作为进一步的技术方案,还包括固定在机械臂上的安装座,在安装座顶部设有通孔,第一定位件位于安装座内,可穿过通孔。
14.作为进一步的技术方案,所述的连杆组件包括第一连杆和第二连杆,所述的第一连杆为弯折连杆,第二连杆为直连杆,其中弯折连杆的弯折部通过销轴与安装座相连,弯折连杆的一端与驱动杆相连,弯折连杆的另一端与第二连杆一端铰接,第二连杆的另一端与
第一定位件铰接。
15.作为进一步的技术方案,所述的距离传感器固定在安装座的顶部,位于第二定位件的上方。
16.作为进一步的技术方案,在所述的机械臂上设有第三定位件,在所述的第三定位件上设有定位孔,定位孔用于与第一定位件配合。
17.作为进一步的技术方案,所述的定位孔包括多个,多个定位孔对应不同的车轮。
18.第二方面,本实用新型实施例还提供了一种机械臂,包括所述的机械臂防松锁紧机构。
19.第三方面,本实用新型实施例还提供了一种车轮生产线,包括所述的机械臂。
20.上述本实用新型的实施例的有益效果如下:
21.1、本实用新型提出的机械臂防松锁紧机构不仅实现常规对机械臂的机械结构上锁紧,而且通过自动化控制的方式实现电机的自锁,机械和电气两种锁紧方式共同保障机械臂在夹取工作中能够安全工作;极大提高了安全防护能力,有效保障了员工的人身安全。
22.2.本实用新型提出的锁紧机构操作简单,工作过程中平稳,固定在机械臂上,不受空间和人力的局限,省时省力,1人即可完成操作。
23.3、本实用新型巧妙的利用了曲柄滑块机构,操作时节省人力,有效结合现场使用环境,节省使用空间,具有很强的实用性。
24.4.本实用新型的锁紧装置在操作过程中,不同车型车轮对应到不同的定位槽,当第一定位件插入到对应的定位孔中时,指示灯亮,操作人员可以直观的判断机械臂是否正常锁紧,不同车轮对应的锁紧定位孔是否准确。
附图说明
25.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
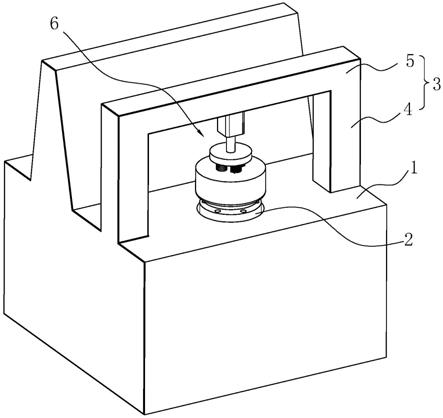
26.图1是本实用新型根据一个或多个实施方式的锁紧装置的示意图;
27.图2是本实用新型根据一个或多个实施方式的锁紧装置的原理图;
28.图3是第一定位件伸出状态的示意图;
29.图4、图5是第一定位件收回状态的示意图;
30.图6是不同车轮对应的定位孔的结构示意图;
31.图中:为显示各部位位置而夸大了互相间间距或尺寸,示意图仅作示意使用。
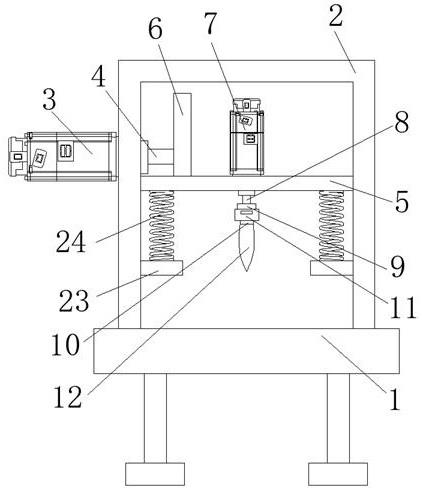
32.1定位销,2安装座,3距离传感器,4定位板,5第二连杆,6第一连杆,7驱动杆,8手柄,9定位板,10定位孔,11门碰装置,12门碰装置。
具体实施方式
33.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本实用新型使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
34.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根
据本实用新型的示例性实施方式。如在这里所使用的,除非本实用新型另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;
35.为了方便叙述,本实用新型中如果出现“上”、“下”、“左”“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
36.术语解释部分:本实用新型中“第一定位件”“第二定位件”“第三定位件”分别代表不同的定位件,“第一、第二、第三”对定位件的结构不起限定作用。
37.正如背景技术所介绍的,现有技术中车轮在机械臂吊运的过程中,通过电机带动丝杠旋转将旋转运动转换为直线运动实现机械臂的夹紧和松开,而此方式夹取车轮运转时存在一定的安全隐患,例如由于机械结构的损坏或者操作人员误碰操作导致机械臂松开车轮掉落而发生安全事故,造成人员伤亡公司财产损失,为了解决如上的技术问题,本实用新型提出了一种机械臂防松锁紧机构。
38.本实用新型的一种典型的实施方式中,提出了一种机械臂防松锁紧机构,包括驱动杆、连杆组件、第一定位件、第二定位件、距离传感器、控制单元、门碰装置和安装座;连杆组件一端与驱动杆相连,另一端与第一定位件相连,连杆组件将驱动杆的旋转运动转换成第一定位件的上下移动;第二定位件固定在第一定位件上且随第一定位件上下移动;所述的距离传感器与所述控制单元相连,距离传感器用于检测第二定位件的位置,控制单元根据第二定位件的位置控制机械臂的电机。门碰装置设置在驱动杆旋转的极限位置。安装座固定在机械臂上,在安装座顶部设有通孔,第一定位件位于安装座内,可穿过通孔。所述的距离传感器固定在安装座的顶部,位于第二定位件的上方。锁紧机构不仅实现常规对机械臂的机械结构上锁紧,而且通过自动化控制的方式实现电机的自锁,机械和电气两种锁紧方式共同保障机械臂在夹取工作中能够安全工作。
39.进一步的,在所述的机械臂上设有第三定位件,在所述的第三定位件上设有定位孔,定位孔用于与第一定位件配合。所述的定位孔包括多个,多个定位孔对应不同的车轮。还包括指示灯,指示灯与控制单元相连,用于指示机械臂是否锁紧。锁紧装置在操作过程中,不同车型车轮对应到不同的定位孔,当第一定位件插入到对应的定位孔当中时,指示灯亮,操作人员可以直观的判断机械臂是否正常锁紧,不同车轮对应的锁紧定位孔是否准确。
40.在本实施例中,如图1所示,上述的第一定位件为一个竖直设置的定位销1,当然不难理解的,在其他实施例中,还可以采用定位杆。
41.在本实施例中,如图1所示,第二定位件为一个水平设置的定位板4;当然不难理解的,在其他实施例中,还可以采用定位块。
42.在本实施例中,驱动杆7上安装有手柄8,所述的驱动杆7通过两个依次铰接的连杆与竖直设置的定位销1相连,通过连杆可以将手柄8的旋转运动转化成定位销1的上下直线运动,定位销1上连接有定位板,定位板的上方设有距离传感器,距离传感器与控制单元相连,控制单元控制电机转动;
43.在本实施例中,定位销1竖直安装在安装座2内,安装座2顶部设有通孔,定位销1可以穿过该通孔;安装座2固定在机械臂上。
44.在本实施例中,第一连杆6为一个弯折连杆,第二连杆5为一个直连杆,其中弯折连杆的弯折部通过销轴与安装座2的下部相连,弯折连杆的一端与手柄相连,弯折连杆的另一端与第二连杆5一端铰接,第二连杆5的另一端与定位销1铰接。
45.进一步的,在本实施例中,上述的第三定位件为定位板9,在所述的第三定位件上设有定位孔10,定位孔10用于与定位销1配合。如图6所示,定位孔10包括多个,多个定位孔对应不同的车轮。锁紧装置在操作过程中,不同车型车轮对应到不同的定位孔,当第一定位件插入到对应的定位孔当中时,指示灯亮,操作人员可以直观的判断机械臂是否正常锁紧,不同车轮对应的锁紧定位孔是否准确。
46.如图2所示,该锁紧机构基于曲柄滑块机构原理,通过转动手柄实现将转动变为定位销的直线运动。车轮夹紧以后,转动手柄,定位销伸出,进入定位槽内,实现了机械臂的锁紧,防止由于丝杠螺母结构故障导致机械臂松开,如图4、图5所示。定位销伸出过程中,固定在定位销上的定位板片随之上升,进入到传感器感应范围内后,传感器发射信号进入控制单元,控制单元接收到信号后对丝杠电机进行控制,实现电机的自锁,防止电机故障或者人员误操作导致机械臂松开。
47.该锁紧机构操作简单,工作过程中平稳,固定在机械臂上,不受空间和人力的局限,省时省力,1人即可完成操作。该装置巧妙的利用了曲柄滑块机构的远离,操作时节省人力,有效结合现场使用环境,节省使用空间,具有很强的实用性。本机构实现了机械臂有效地锁紧,避免了可能存在的安全隐患,具有很强的实用价值。
48.本实用新型具体的工作状态如下:
49.当机械臂处于未夹紧状态时,将该装置手柄8旋转到右边限位,并由门碰装置12将手柄锁紧,定位销1处于收回状态,如图4、图5所示;当机械臂处于夹紧状态时,将手柄旋转至左边限位,由门碰装置11将手柄锁紧,定位销1处于伸出状态并插入定位孔10中进行机械锁紧,如图3所示。定位板4固定在定位销1上并随定位销1上下移动,当定位销1处于伸出并锁紧状态时,距离传感器感8应到板片位置并发射信号,通过控制单元实现电机自锁,此时,指示灯亮;当定位销1收回,距离传感器8无感应信号,电机自锁解除,指示灯灭。
50.进一步的,本实施例还提出了一种机械臂,包括前面所述的机械臂防松锁紧机构,防松锁紧机构的安装座固定在机械臂上,门碰装置12和门碰装置11也固定在机械臂上。
51.进一步的,本实施例还提供了一种车轮生产线,包括前面所述的机械臂。
52.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。