用于确定激光检测器高程的系统和方法
1.相关申请的交叉引用
2.本技术要求于2019年2月8日提交的美国临时专利申请no.62/803,152和2019年12月20日提交的美国实用专利申请no.16/721,992的权益,两者的全部内容通过引用并入本文。
发明领域
3.本发明大体涉及机器控制和操作,更特别地涉及确定激光检测器的高程并以比照射激光检测器的激光入射频率更快的速率提供高程信息。
背景技术:
4.用于施工的机器可以使用旋转激光系统以确定机器和/或机器的器具的高程(例如,相对于参考的高度)。图1a描绘了一种旋转激光系统,其包括输出激光束128的激光发射器140,该激光束绕激光发射器140的竖向轴线旋转。激光发射器的镜、光学部件和/或机械部件使激光在具有已知高程132的激光参考平面中旋转。激光检测器112附接到杆114。激光检测器112在激光束128照射激光检测器112的多个激光检测器元件(图1b和图1c中所示的116)中之一时检测该激光束,如现有技术中所公知的。激光束128照射在多个激光检测器元件中之一上被称为激光入射(strike,冲击、照射)。激光检测器元件可以是光感受器、光电二极管或可以检测激光束128的其他类型的传感器。杆114被附接至机器110的器具120,诸如图1a所示的推土机。激光检测器112的高程是相对于激光束128确定的,并且机器的器具的高程可以基于激光检测器112的高程来确定,因为从器具120到激光检测器112的距离是已知的。激光检测器的输出速率是从激光检测器输出高程数据的频率。激光检测器的输出速率与激光检测器112检测到激光入射的速率直接相关。典型的激光发射器使激光在激光参考平面中以600rpm(10hz)旋转,这意味着每次旋转之间为100毫秒,因此激光检测器以10hz的速率检测激光入射。因此,激光检测器以检测激光的相同速率输出与激光入射有关的信息,在该示例中为10hz。在激光入射之间的时间段期间,激光检测器的高程不会被检测到。
5.图1b描绘了激光束128照射位于激光检测器112的竖向中心附近的多个激光检测器元件中之一。图1c描绘了激光束128照射位于激光检测器112的下端部附近的多个激光检测器元件116中之一。在该示例中,这种情况发生在激光检测器112已经相对于激光束128向上移动时。类似地,当激光检测器112相对于激光束128已经向下移动时,位于激光检测器112的上端部附近的激光检测器元件116中之一将检测到激光束128。从图1b和图1c中可以看出,只有当激光束128照射到多个激光检测器元件116中之一上时才能检测到激光束128。
6.需要的是一种用于以比检测激光入射的速率更快的速率提供高程信息的方法和系统。
技术实现要素:
7.一种用于确定激光检测器组件的高程的方法,该方法包括基于来自惯性测量单元的数据和检测到的激光入射来计算激光检测器组件的估计高程。然后输出估计高程。在一个实施方式中,基于检测到的激光入射来计算激光检测器组件的检测高程,并且响应于检测到的激光入射来输出检测高程。在检测高程的输出之间计算并输出估计高程。在一个实施方式中,计算和输出估计高程的频率与计算和输出检测高程的频率相同。估计高程的输出与检测高程的输出异相180度。在一个实施方式中,以比激光入射频率高的频率计算和输出激光检测器组件的估计高程。
附图说明
8.图1a描绘了用于确定高程的旋转激光系统;
9.图1b描绘了激光检测器,其中激光束照射多个激光检测器元件中之一;
10.图1c描绘了图1b的激光检测器,其中激光束照射多个激光检测器元件中的另一激光检测器元件;
11.图2描绘了根据一实施方式的激光检测器组件;
12.图3描绘了根据一实施方式的激光检测器组件的示意图;
13.图4描绘了示出基于激光入射来计算的激光检测器组件的高程的图表;
14.图5描绘了示出基于激光入射和来自惯性测量传感器的数据来计算的激光检测器组件的高程的图表;以及
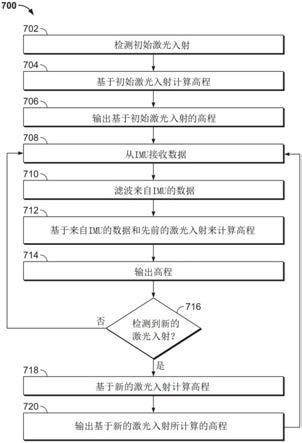
15.图6描绘了根据一实施方式的用于确定激光检测器组件的高程的方法的流程图。
具体实施方式
16.图2描绘了输出激光束128的激光发射器140。在一个实施方式中,激光发射器140输出激光束128,该激光束绕基本竖向的轴线旋转从而形成基本水平的激光参考平面130。在一个实施方式中,激光发射器140可以被编程以使水平参考平面130倾斜,从而说明竖向轴线不是完全竖向的(即,不是完全铅锤的)。发射器140也可以被编程以输出倾斜的激光参考平面以便指示待修改的表面所期望的斜率。在一个实施方式中,激光发射器140的高程是已知的。因此,激光参考平面130的高程132也是已知的。这种旋转激光在本领域中是众所周知的。
17.激光束128由激光检测器组件100的激光传感器150检测,在一个实施方式中,其包括激光传感器150和杆250(在下面详细描述)。激光检测器组件100被安装到机器110的器具120,在该示例中,其是推土机的铲刀。在一个实施方式中,机器110用于根据由激光发射器140建立的水平激光参考平面130来修改表面。在一个实施方式中,机器110用于根据使用水平激光参考平面130作为参考的期望总平面图来修改表面。
18.在一个实施方式中,基于激光束照射在激光传感器150上的位置(称为激光入射)并基于来自惯性测量单元的数据来确定激光传感器150的高程。惯性测量单元的使用允许以比激光束128被激光传感器150检测到的频率大的频率来确定激光传感器150的高程。
19.激光检测器组件100包括从器具120竖向延伸并用作激光传感器150的支撑件的杆250。激光传感器150可以沿杆250手动地被移动并沿杆250被固定在期望位置。激光传感器
150还可以通过马达沿着杆250移动,该马达可以由用户在杆250处或远程地致动。在一个实施方式中,激光传感器150的高度大约为150毫米并且包括被配置成光电二极管排或光电二极管阵列的多个激光检测器元件(图3中所示的310)。在其他实施方式中,激光传感器可以包括其他类型的传感器并且可以具有范围从大约150毫米到250毫米的高度。
20.图3是激光检测器组件100的示意性描绘。激光传感器150包括将位置数据传输到计算机235的多个激光检测器元件310。在一个实施方式中,计算机235分析来自激光检测器元件310的位置数据并且确定激光沿着激光传感器150的竖向轴线的竖向位置,激光束128照射在该位置处。例如,位于检测激光128的激光传感器150的竖向中心处的(图3所示的多个激光检测器元件310中的)检测器元件指示激光束128大约照射在激光传感器150的竖向中心处。类似地,在激光传感器检测激光束128的一个端部处的检测器元件指示激光束128照射在激光传感器150的相应端部处。
21.计算机235从激光检测器元件310接收数据并确定激光沿激光传感器150的竖向轴线的位置。计算机235包括处理器236,该处理器通过执行限定这种操作的计算机程序指令来控制计算机235的整体操作。计算机程序指令可以被存储在存储设备238或其他计算机可读介质(例如,磁盘、cd rom等)中,并在期望执行计算机程序指令时被加载到存储器237中。因此,图6的方法步骤可以由存储在存储器237和/或存储设备238中的计算机程序指令限定,并由执行计算机程序指令的处理器236控制。例如,可以将计算机程序指令实现为由本领域技术人员编程的计算机可执行代码,以实施由图6的方法步骤限定的算法。因此,通过执行计算机程序指令,处理器236执行由图6的方法步骤限定的算法。计算机235还可以包括一个或更多个网络接口(未示出),用于经由使用户能够与计算机235交互的网络、输入/输出设备(例如,显示器、键盘、鼠标、扬声器、按钮等)与其他设备进行通信本领域技术人员将认识到,实际计算机的实施方案也可以包括其他部件,并且出于例示目的,图3的计算机235是这种计算机的一些部件的高级表示。由计算机235计算的高程数据(如下详细描述的)可以被传输到其他设备,诸如与机器110(如图2所示)的操作相关联的机器控制指示器(未示出)。在一个实施方式中,来自计算机235的数据传输可以是有线或无线的,并且有助于机器诸如图2中所示的机器110的操作自动化。例如,机器110对器具120的致动可以自动化以使用由计算机235计算的高程数据来基于期望的坡度修改表面。
22.惯性测量单元(“imu”)230与处理器236通信。imu230使用一个或更多个加速度计(例如3轴加速度计)和/或陀螺仪(例如3轴陀螺仪)来感测激光检测器组件100(具体地,激光传感器150)的移动。在一个实施方式中,激光检测器组件100附接到机器110的器具120。因此,imu检测器具120的移动,不管器具120如何被移动。例如,器具可以被致动器具120的机器110的操作员移动。器具120也可以基于机器110在表面上的移动而移动。imu 230可以确定来自参考位置的移动。来自参考位置的移动允许计算imu 230的新位置。
23.图4描绘了示出检测高程值的图表500,该检测高程值在一个实施方式中通过计算机235基于激光入射来计算(以下与图6一起详细描述)。图表500具有与照射激光传感器150的激光128的以英寸为单位的高程相关联的竖向轴线和与以毫秒为单位的时间相关联的水平轴线。如图5所示,在100毫秒时,激光128的高程被标识为8英寸,如检测高程标记502(即“x”)所示。在200毫秒时,激光检测器组件100的检测高程通过检测高程标记504标识为10英寸。类似地,激光128的检测高程在稍后通过高程标记506
‑
514标识。如上所述,激光检测器
组件100的高程可以基于照射在激光传感器150上的激光128的高程来确定。
24.图5描绘了图表600,其示出检测高程标记(为了清晰起见,图4中的标记从图5中省略)以及估计高程标记602
‑
636。图表600具有与照射在激光传感器150上的激光128的以英寸为单位的高程相关联的竖向轴线和与以毫秒为单位的时间相关联的水平轴线。估计高程标记602
‑
636中的每个高程标记由实心圆(即,点)表示。高程标记602
‑
636中的每个高程标记表示在特定时间处的估计高程的值。在一个实施方式中,估计高程基于先前的激光入射和来自imu 230的数据。例如,检测高程标记502标识基于激光入射来计算的高程值。估计高程标记602标识基于激光入射和来自imu 230的数据来计算的高程值,其与激光入射已经发生后所确定的激光入射的高程的改变有关。如图5所示,估计高程标记602、604和606标识估计高程的增大高程。在检测到随后的激光入射之后,基于随后的激光入射来确定新的检测高程,其值由检测高程标记504标识。如图5所示,估计高程标记606的高程值大于检测高程标记504的高程值。高程标记504的高程值是基于激光入射来计算的。因此,防止基于先前激光入射和来自imu 230的数据的估计高程值的漂移或偏差继续漂移,因为检测高程值是基于每次激光入射来计算的。如图5所示,当计算检测高程值诸如由例如检测高程标记506标识的值时,防止估计高程值608、610和612的漂移继续漂移。
25.如图5所示,可以使用来自imu 230的数据来确定激光检测器组件100的高程。因此,可以在激光入射之间的时间段期间计算激光检测器组件100的高程。
26.如图4和图5所示,并且在此描述,接收来自imu 230的数据并且可以通过计算机235基于来自imu 230的频率高于激光入射频率的数据来计算高程。因此,每个激光入射可以用作计算激光检测器组件100的高程的参考,并且来自imu 230的数据可以用于在激光入射之间的时间段期间计算激光检测器组件100的高程。这有助于以比激光入射频率高的频率将高程数据从激光检测器组件100输出到其他设备(诸如与图1a中所示的机器110相关联的机器控制器)。高程数据的较高频率输出允许较准确地控制机器(例如,机器110)。
27.在一个实施方式中,激光检测器组件100基于照射在激光传感器150的激光检测器元件310上的激光束128和来自imu 230的数据来确定高程。图6描绘了根据一个实施方式的用于确定激光检测器组件100的高程的方法的流程图。在一个实施方式中,该方法由激光检测器组件100的处理器236执行。在步骤702,检测到初始激光入射。在步骤704,基于初始激光入射计算激光检测器组件100的高程。在步骤706,将在步骤704计算的激光检测器组件100的高程从处理器236输出。计算出的激光入射高程也称为检测高程。在一个实施方式中,检测高程被传输到另一设备,诸如与机器110相关联的机器控制器。
28.在步骤708,从imu 230接收数据。在一个实施方式中,如下文进一步详细描述的,在步骤710滤波接收到的数据。在步骤712,基于来自imu230的数据和先前的激光入射(例如,在步骤702检测到的初始激光入射)来计算激光检测器组件100的高程。基于来自imu 230的数据和先前的激光入射来计算的激光检测器组件的高程称为估计高程。在步骤714,将高程从处理器236输出到另一设备,诸如与机器110相关联的机器控制器。
29.在步骤716,确定是否已经检测到新的激光入射。如果没有检测到新的激光入射,则该方法进行到步骤708。如果检测到新的激光入射,则该方法进行到步骤718。在步骤718,基于新的激光入射来计算高程。在步骤720,将高程从处理器236输出到另一设备,诸如与机器110相关联的机器控制器。在步骤720之后,该方法进行到步骤708。
30.如上所述,在一个实施方式中,方法步骤708至716继续重复直到检测到新的激光入射。当检测到新的激光入射时执行方法步骤718和720,然后该方法返回到步骤708。因此,基于先前的激光入射和imu数据来计算的高程数据可以在激光入射之间的时间期间被输出一次或更多次。
31.激光入射的频率取决于激光束128绕激光发射器140的竖向轴线的旋转速率。激光束128绕激光发射器140的典型旋转速率大约为每分钟600转,这使得以10hz的频率发生激光入射。使用来自imu 230的数据来感测激光检测器组件100的移动允许以比激光入射频率高的频率输出高程值,因为可以基于来自imu 230的数据来预测激光入射的位置改变。因此,计算高程值的频率与激光入射频率无关,并且可以是通过从imu 230接收数据的频率和计算机235可以计算高程值的频率来支持的任何期望频率。
32.计算并从计算机235输出高程数据的频率是一种设计选择。在一个实施方式中,在激光入射之间的时间段期间输出基于先前激光入射和imu数据来计算的单个高程值。在一个实施方式中,在激光入射之间的时间段期间输出基于先前激光入射和imu数据来计算的十个高程值。应当注意的是,步骤712的先前激光入射可以是步骤702的初始激光入射或步骤716的新的激光入射。
33.相对于检测高程的输出,计算并从计算机235输出估计高程值的阶段是一种设计选择。在一个实施方式中,计算并且输出与检测高程的输出异相180度的估计高程值。例如,检测高程在100毫秒、200毫秒、300毫秒等时间处被计算和输出,以及估计高程在150毫秒、250毫秒、350毫秒等时间处被计算和输出。从计算机235输出多个估计高程值的阶段可以基于激光入射的频率和在激光入射之间的时间段期间所计算的估计高程值的数量。
34.在一个实施方式中,卡尔曼滤波器用于融合来自激光传感器150的测量和通过imu 230检测到的激光传感器150相对于激光束128的加速度。使用卡尔曼滤波器对测量进行融合,提供了关于激光传感器150的位置和移动信息。本文描述的卡尔曼滤波器可以是基于软件的、基于硬件的、或者是软件和硬件的组合。卡尔曼滤波器的目的是估计激光传感器150相对于激光束128的位置和速度。该信息用于确定激光传感器150的高程。
35.在一个实施方式中,两个卡尔曼滤波器以100hz同步处理来自激光传感器150和imu 230的数据,以便追踪激光传感器150的运动和激光入射位置。处理imu测量的卡尔曼滤波器使用imu 230来估计实际激光入射之间的激光入射的位置。如上所述,在一个实施方式中,使用两个卡尔曼滤波器。在其他实施方式中,可以使用少于两个卡尔曼滤波器。
36.上面描述的部件例如结合图3被示出为组合在一个壳体中。在一个实施方式中,图3中所示的部件可以位于被定位成彼此分隔的不同壳体中。例如,在一个实施方式中,imu 230可以被定位成远离其他部件,并且数据可以通过有线或无线连接传输到计算机235。也可以实施其他布置。在另一示例中,计算机235的操作可以通过从imu 230和激光传感器的检测器元件接收信号的机器控制器来执行。
37.多个传感器和/或各种类型的传感器诸如激光传感器和imu的用途可以用来执行传感器融合。在一个实施方式中,imu用于标识从激光传感器接收到的错误激光位置信息。例如,如果激光入射数据指示了激光检测器组件的高程已经改变,但imu数据指示没有移动,则激光入射数据可以被认为是错误的并不会被用于高程计算。在一个实施方式中,imu用于标识错误的激光入射数据并以与激光入射频率相同的频率输出高程数据。在一个实施
方式中,当确定检测到的激光入射是错误的(即,基于先前激光入射和来自imu的移动数据是不正确的)时,输出估计高程来代替检测高程。例如,可以将基于当前激光入射所计算出的高程与基于来自imu的移动数据和先前检测到的激光入射所计算出的高程进行比较。如果基于当前激光入射来计算的高程值不在基于来自imu的移动数据和先前检测到的激光入射来计算的高程值的阈值内,则当前激光入射可以被标识为错误,并且估计高程可以被输出以代替检测高程。除了通常使用传感器融合之外,也可以使用通过平均激光入射数据和/或来自imu的移动数据来降低激光位置噪声的技术。
38.前述详细说明应被理解为在每个方面都是例示性和示例性的,而不是限制性的,并且本文所公开的本发明构思的范围不是通过详细说明来确定,而是通过根据专利法所允许的全部范围所解释的权利要求来确定。应当理解的是,本文示出和描述的实施方式仅是对本发明原理的例示,并且在不脱离本发明构思的范围和精神的情况下,本领域技术人员可以实施不同的修改。本领域技术人员可以在不脱离本发明构思的范围和精神的情况下实现不同的其他特征组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

