1.本发明涉及吊具技术领域,特别地,涉及一种集成化桥吊的吊具控制系统。
背景技术:
2.桥吊,主要用于起吊工作,在码头港口,经常需要用到桥吊来吊装集装箱。一般集装箱顶部四角处设置有锁头,在桥吊的吊具上设置有与锁头对应的扭锁,扭锁插入锁头后旋转一定角度便可完成与锁头的锁合,如此便可进行后续的起吊工作。
3.现有的桥吊吊具一般包括主梁和设置在主梁两端的支臂,扭锁安装在支臂上,为了使适配集装箱的长度,通常支臂是活动安装在主梁上的,通过动力部件带动支臂沿主梁长度方向移动,以使其与集装箱适配。
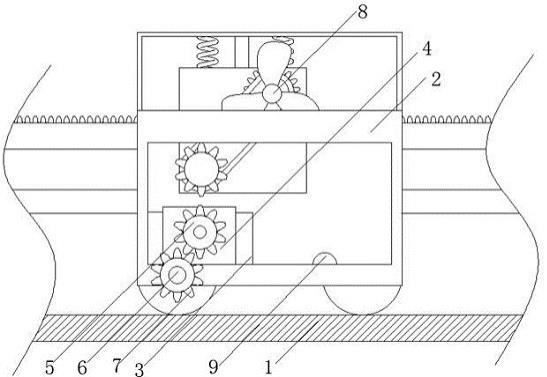
4.然而,这种吊具在使用时存在一个很大的弊端,有时候可能并排存在多个集装箱,此时,由于扭锁在于锁头锁合时难以直接观察到,容易出现,其中一个支臂上的两扭锁锁合在目标集装箱上,而另一支臂上的两扭锁锁合在了目标集装箱相邻的集装箱的锁头上(如说明书附图5所示),如此相当于吊具同时抓取了两个集装箱,若直接起吊,容易导致集装箱掉落等安全问题,故还有待改进。
技术实现要素:
5.有鉴于此,本发明目的是提供一种集成化桥吊的吊具控制系统。
6.为了解决上述技术问题,本发明的技术方案是:
7.一种集成化桥吊的吊具控制系统,包括plc,以及吊具;所述吊具包括主梁,以及设于主梁两端可相对主梁进行位移的支臂,所述支臂两端底部设有用以与集装箱顶部锁头进行锁合的扭锁,还包括设于支臂上的检测机构,所述检测机构包括设于支臂底部的扫描件、用于驱动扫描件沿主梁长度方向移动的驱动机构,以及与plc连接的警示件;所述扫描件用于对集装箱顶部区域进行扫描,以确定集装箱顶部是否具有间隙,当扫描件测得集装箱顶部具有间隙,则plc控制警示件发出警示信号。
8.采用本方案的优点在于:
9.首先,本方案中在支臂底部设置检测机构,具体的通过扫描件来实现检测,如此在扭锁与集装箱的锁头锁合后,可以通过扫描件来对其底部集装箱进行扫描;其原理主要是:并排相邻的两集装箱之间必然存在一个间隙,如果其中某两个扭锁锁合在目标集装箱相邻的集装箱的锁头上,在这种状态下,扫描件在扫描时,可以扫描到相邻两集装箱之间的间隙,则表明扭锁锁合在目标集装箱相邻的集装箱上,此时通过警示件发出示警,以提醒工作人员,避免工作人员在此状态下吊升集装箱,造成安全事故。
10.其次,本方案中,扫描件是通过驱动机构驱动位移的,如此可以顺着主梁的长度方向进行直线扫描,而非在某一个固定的位置进行扫描,如此能够提高扫描结果的准确性,假如扫描件是固定不动的,则其能扫描的位置也仅一处,此时若两集装箱的接缝位置不在此处,则便无法实现检测,从而导致检测结果出现偏差。
11.进一步的,所述驱动机构包括固定安装在支臂底部且沿主梁长度方向向支臂内侧延伸的轨道,以及滑动安装在轨道上的滑块;所述滑块与轨道之间设有驱动滑块沿轨道移动的动力件;所述扫描件设于滑块上。
12.进一步的,所述轨道中间具有沿轨道长度方向延伸的滑槽,所述滑块滑动连接在滑槽内,所述轨道的底部设有用于覆盖滑槽槽口的盖板,所述盖板上开设有沿轨道长度方向延伸供扫描件扫描的检测口。
13.进一步的,所述扫描件为激光测距仪,所述激光测距仪的初始扫描位置位于支臂上两扭锁的连线上。
14.进一步的,所述扭锁包括锁合状态和解锁状态;当扭锁处于锁合状态时,plc控制扫描件开启,当扭锁处于解锁状态时,plc控制扫描件关闭。
15.进一步的,所述支臂两端设有安装座,所述扭锁设于安装座上;所述扭锁包括转动连接在安装座上的转轴、设于转轴下端用以与锁头锁合的锁舌,以及用于驱动转轴旋转的第一电机,所述安装座内开设有检测腔,所述转轴穿过所述检测腔;所述检测腔内设有检测件,当转轴带动锁舌转动至锁合状态时,检测件响应,plc控制扫描件开启;当转轴带动锁舌转动至解锁状态时,检测件不响应,plc控制扫描件关闭。
16.进一步的,所述扫描件为红外检测器,包括安装于检测腔侧壁上的发射端和接收端;所述发射端与接收端相对设置,所述发射端用于发射红外光,所述接收端用于接收发射端发射的红外光,当接收端接收到发射端发射的红外光时,plc控制扫描件开启;所述转轴位于发射端和接收端之间,且所述转轴上开设有沿转轴径向设置供红外光通过的穿孔,当转轴转动至锁合状态时,所述穿孔的两端分别朝向发射端和接收端。
17.进一步的,所述安装座内还开设有安装腔,所述第一电机设于安装腔内,所述转轴通过推力球轴承安装在安装座上;所述转轴的上端延伸至安装腔内与第一电机的主轴连接,所述第一电机的主轴与转轴在周向上保持相对固定且在轴向上可与转轴相对滑动。
18.进一步的,所述转轴的上端开设有供第一电机的主轴插入的插孔,所述第一电机的主轴上固定连接有凸键,所述插孔的周壁上开设有沿插孔轴向设置供凸键嵌入的键槽。
附图说明
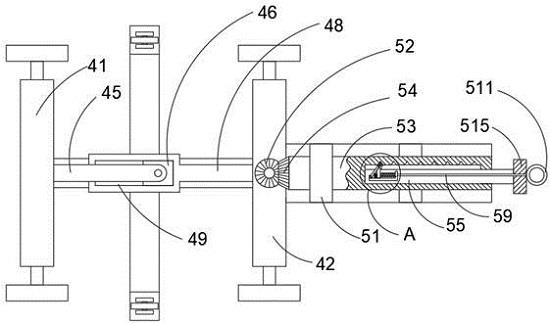
19.图1为吊具的结构示意图;
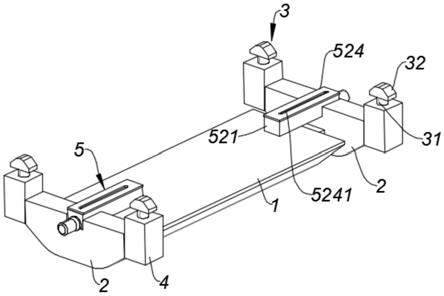
20.图2为驱动机构的结构示意图;
21.图3为安装座内部结构示意图;
22.图4为第一电机与转轴的结构示意图;
23.图5为吊具同时装夹两个集装箱状态的示意图。
具体实施方式
24.以下结合附图,对本发明的具体实施方式作进一步详述,以使本发明技术方案更易于理解和掌握。
25.实施例:
26.如图1所示,本实施例提供一种集成化桥吊的吊具控制系统,包括plc,以及吊具。
27.所述吊具包括主梁1,以及设于主梁1两端可相对主梁1进行位移的支臂2,即支臂2
可沿主梁1长度方向移动,以调节两支臂2之间的间距,使之与集装箱长度相适应,对于主梁1和支臂2的这种移动调节结构在现有技术中有大量的文献公开,故在此不做赘述。
28.所述支臂2两端底部设有用以与集装箱顶部锁头进行锁合的扭锁3,需要说明的是,现有集装箱四角处均会设置锁头,锁头上会设置要腰型锁槽,扭锁3与该锁槽适配,锁定时,扭锁3插入锁槽内,然后旋转一定角度,一般为90度,扭锁3便于锁槽的槽口错开使扭锁3无法从锁槽内直接抽出,以完成锁合。
29.还包括设于支臂2上的检测机构,所述检测机构包括设于支臂2底部的扫描件、用于驱动扫描件沿主梁1长度方向移动的驱动机构,以及与plc连接的警示件;扫描件与警示件均与plc连接,所述扫描件用于对集装箱顶部区域进行扫描,以确定集装箱顶部是否具有间隙,当扫描件测得集装箱顶部具有间隙,则plc控制警示件发出警示信号。
30.本实施例中,扫描件可以采用激光测距仪,其包括一个激光头51,利用激光头51来发射激光进行测距,所述激光测距仪的初始扫描位置位于同一支臂2上两扭锁3的连线上,这里的初始扫描位置即激光头51的起点位置,将其设置在两扭锁3的连线上目的在于,使三者位于同一直线上,如此激光头51的初始位置与扭锁3位于同一直线上,如此扭锁3在何集装箱上,激光头51的初始位置便在何集装箱上,保证扫描结果的准确性。
31.具体原理为:激光头51向下发射激光,测得激光头51到集装箱表现的距离,当激光照射到两集装箱之间的间隙时,此时激光测距仪所测得的结果必然大于直接照射到集装箱的距离,据此原理只需给plc设定一个参照值,当激光测距仪所测得的距离大于该参照值时,表明激光检测到了间隙,表面吊具跨夹了两个集装箱;若整个过程中,激光测距仪检测的数值小于或等于参照值,表明扫描过程中未检测到间隙,则表面吊具夹装在同一集装箱上。
32.具体工作时,首先使吊具上的4个扭锁3分别锁合在集装箱的锁头上,完成锁合后,开启激光扫描仪,并通过驱动机构控制扫描件向支臂2内侧移动,在此过程中激光头51不断向下扫描测距,当扫描完成后,若出现大于参照值得测距值时,则表面检测到了间隙,间接表明扭锁3锁合在了不同集装箱上,此时,plc控制警示件进行示警,已提醒工作人员,本实施例中,警示件可以采用蜂鸣器或警示灯,将其设置在操作室或其他可以被直观了解到的地方。
33.为了更清楚的理解本方案,参照图5所示,示意了扭锁夹持在不同集装箱中的情况,其中a1表示目标集装箱,即待吊具抓取吊升的集装箱,a2为目标集装箱相邻的集装箱,a3为集装箱上的锁头,该图中箭头所示方向为扫描件的移动扫描方向;在该状态下,a1和a2之间具有一个间隙,扫描件主要用于扫描该间隙的存在与否,以此判断是否是两个集装箱,如图5中所示的状态,其中一个支臂上的两扭锁位于目标集装箱a1上,没有问题,但另一支臂上的两扭锁却对准的是集装箱a2,在此状态下,若直接吊升,容易出现集装箱掉落的问题,造成安全事故。
34.结合图2所示,所述驱动机构包括固定安装在支臂2底部且沿主梁1长度方向向支臂2内侧延伸的轨道521,以及滑动安装在轨道521上的滑块525;所述滑块525与轨道521之间设有驱动滑块沿轨道521移动的动力件;所述扫描件,即激光头51,设于滑块525上。
35.所述轨道521中间具有沿轨道521长度方向延伸的滑槽5211,所述滑块525滑动连接在滑槽5211内,动力件包括转动连接在滑槽5211内的丝杠523、设于轨道521上用于驱动
丝杠523旋转的第二电机522,丝杠523与滑块525螺纹连接,通过第二电机522带动丝杠523旋转,进而带动滑块525在滑槽5211内进行移动,实现移动扫描。
36.为了对激光头51起到一定的保护效果,所述轨道521的底部设有用于覆盖滑槽5211槽口的盖板524,所述盖板524上开设有沿轨道521长度方向延伸供扫描件(即激光头51)扫描的检测口5241,激光头51设于滑槽5211内,被盖板524遮挡,如此盖板524便可起到一定的防护效果,检测口5241主要用于供激光头51发射的激光通过,保证激光头51可以正常测距。
37.所述扭锁3包括锁合状态和解锁状态;这里的锁合状态指的是扭锁3旋转至与锁头锁定的角度状态,解锁状态则指的是扭锁3旋转至锁头解锁的角度。
38.结合图3所示,由上述过程检测过程可知,在解锁状态下,显然激光头51无需开启工作的,在该状态下可以将激光头51关闭,而且激光头51的使用时长是有限的,若其一直开启,显然不利于激光头51的有效使用寿命;而若仅设置控制激光头51启动的开关,则需要工作人员自行操作控制该开关,不仅增加了工作人员的工作操作工序,而且工作人员有时会出现遗忘,忘记控制开关关闭,故而本实施例做进一步的改进,当扭锁3处于锁合状态时,plc控制激光头51开启,当扭锁3处于解锁状态时,plc控制激光头51关闭,防止扭锁3在处于解锁状态下,激光头51还处于通电开启的状态,需要说明的是,正常情况下,吊具在不工作状态,其处于解锁状态,以便于下次直接吊装锁合使用。
39.上述结构具体为:所述支臂2两端设有安装座4,所述扭锁3设于安装座4上;所述扭锁3包括转动连接在安装座4上的转轴31、设于转轴31下端用以与锁头锁合的锁舌32,以及用于驱动转轴31旋转的第一电机33,锁舌32与锁头的锁槽适配,第一电机33驱动转轴31旋转,进而带动锁合旋转,在解锁状态下,锁舌32可以竖直插入锁头的锁槽内,锁合时,第一电机33驱动转轴31旋转90度,此时锁舌32随之一起在锁头的锁槽内旋转90度,以完成锁合。
40.所述安装座4内开设有检测腔,所述转轴31穿过所述检测腔;所述检测腔内设有检测件,当转轴31带动锁舌32转动至锁合状态时,检测件响应,plc控制激光头51开启;当转轴31带动锁舌32转动至解锁状态时,检测件不响应,plc控制激光头51关闭,具体的:
41.所述扫描件为红外检测器,其包括发射红外光的发射端61,以及用于接收发射端61发射的红外光的接收端62;发射端61和接收端62分别固定在检测腔的相对两侧壁上。接收端62与plc连接,当接收端62接收到发射端61发射的红外光时,plc控制激光头51开启,反之,则控制激光头51关闭。
42.其中,所述转轴31位于发射端61和接收端62之间,且所述转轴31上开设有沿转轴31径向设置供红外光通过的穿孔311,当转轴31转动至锁合状态时,所述穿孔311的两端分别朝向发射端61和接收端62,换言之,在该状态下,发射端61和接收端62位于穿孔311的轴线上,使得发射端61发射的红外光可以通过穿孔311照射到接收端62被接收端62接收,当转轴31旋转至解锁状态时,此时穿孔311位置便改变,不再朝向发射端61和接收端62,此时在转轴31的阻挡下,发射端61的光线被转轴31挡住,无法照射到接收端62上,进而plc不会控制激光头51开启。
43.本实施例中,所述安装座4内还开设有安装腔42,所述第一电机33设于安装腔42内,所述转轴31通过推力球轴承7安装在安装座4上;具体的,推力球轴承7的座圈固定在安装腔42的底壁上,轴圈固定在转轴31上,通过推力球轴承7保证转轴31的周向转动和轴向承
重。
44.所述转轴31的上端延伸至安装腔内与第一电机33的主轴连接,通过第一电机33带动转轴31旋转,进而带动锁舌32旋转,以完成解锁或锁合。
45.本实施例中,所述第一电机33的主轴与转轴31在周向上保持相对固定且在轴向上可与转轴31相对滑动,具体的:
46.结合图4所示,所述转轴31的上端开设有供第一33电机的主轴插入的插孔312,所述第一电机33的主轴上固定连接有凸键331,所述插孔312的周壁上开设有沿插孔312轴向设置供凸键嵌入的键槽313,通过凸键331和键槽313的配合,使得第一电机33的主轴在旋转时,可以带动转轴31同步旋转;本实施例中,凸键331可以沿着键槽313进行轴向的活动,目的在于,使第一电机33的主轴不参与轴向的承重;假如第一电机33的主轴与转轴31固定连接,此时,如果锁舌32在承重过大导致转轴31下移时,此时由于第一电机33和转轴31是固定的,则转轴31必然会下拉第一电机33的主轴,使得第一电机33的主轴承受较大的拉力,使得第一电机33容易被损坏,而本实施例中,由于第一电机33的主轴是通过凸键331与键槽313配合的,如此即使转轴31下移,第一电机33的主轴也不会被转轴31下拉,从而对第一电机33起到防护作用。
47.以上只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。