1.本发明涉及工业过程的控制技术领域,具体为一种工业过程多维容错预测控制方法。
背景技术:
2.随着科技的高速发展,工业生产逐渐呈现小规模、多品种、高附加值等特点,间歇过程再次引起了人们的关注。目前,间歇生产技术已经在制造业、制药、金属合成等多个领域得到了广泛的应用。由于工业生产的操作工艺和流程越来越复杂,系统发生故障的可能性增大。同时,时滞现象在工业过程中普遍存在。故障和时滞等因素的存在已逐步成为间歇过程稳步高效运行的阻碍。故障分为传感器故障、执行器故障以及系统的其他元部件故障。在所有故障中,执行器故障在工业生产中最为普遍。执行器故障的存在会降低系统的运行精度,损害系统的控制性能,甚至影响生产效率。时滞的存在会造成系统的响应速度迟滞以及跟踪性能恶化,甚至影响系统的稳定性。因此在故障和时滞的双重影响下,找到有效可行的控制方法来保障控制过程的稳步高效运行,对工业生产具有重要意义。
3.为了解决故障问题,间歇过程的容错控制技术得以广泛应用,但是目前的技术层面以一维为主,一维方法只是考虑时间与具体工业生产的影响。另外,在实际生产中,会存在执行器故障、漂移及系统外部干扰等因素,那么系统的控制性能会受到很大的影响。而间歇过程又因其具有的二维特性,当前批次发生的故障极有可能影响下一批次甚至未来的很多个批次。再加上在批次过程中时滞的存在,很显然增加了控制器设计的难度。寻求在故障及时滞双重影响下的间歇过程新的优化控制方法变得极为必要。
技术实现要素:
4.本发明的目的在于提供了一种工业过程多维容错预测控制方法,针对带有多时滞、干扰和执行器故障的间歇过程,能实时的更新控制律,改善批次过程中控制方法的跟踪性能和抗干扰性,同时保证系统的控制性能最优,实现高效生产。
5.为实现上述目的,本发明提供如下技术方案:一种工业过程多维容错预测控制方法,包括
6.步骤1.针对带有时滞的间歇过程,建立等价的多时滞新型误差模型;
7.步骤2.在新型误差模型基础上,基于多步预测思想建立2d
‑
roesser状态空间模型并给出性能指标表示;
8.步骤3.建立2d
‑
roesser状态空间模型的闭环控制系统,建立此系统具有不变集特性的充分条件;
9.步骤4.基于步骤1和3中的沿时间及批次方向上的预测模型,设计预测控制器及选取抗外界干扰的具有终端约束的性能指标函数,并给出预测模型的终端约束集是不变集的充分条件;
10.步骤5.针对选取的性能指标函数构建优化算法,获得沿时间及批次方向上的期望
控制性能。
11.与现有技术相比,本发明的有益效果是:运用扩维的理念,针对每一时滞,设计含有相应时滞的v函数,这样设计可以很好地弥补传统容错控制的不足,在控制器设计和计算方面具有优势。尤其针对小时滞系统具有设计简单,计算量小等特性。
12.本发明针对带有多时滞、干扰和执行器故障的间歇过程,结合迭代学习控制律,选取lyapunov
‑
razumikhin函数(lrf),利用模型预测容错控制方法提出了一种带有时滞和扰动的间歇过程2d预测容错控制方法,能实时的更新控制律,改善批次过程中控制方法的跟踪性能和抗干扰性,同时保证系统的控制性能最优,实现高效生产。
附图说明
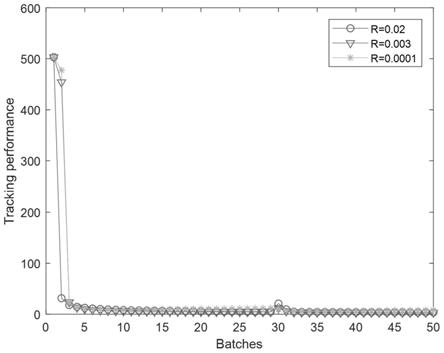
13.图1为本发明重复扰动下不同r跟踪性能图。
14.图2为本发明重复扰动下在不同批次的输入轨迹图。
15.图3为本发明重复扰动下在不同批次的输出轨迹图。
16.图4为本发明重复扰动下在不同批次的更新律。
17.图5为本发明重复扰动下在不同批次的跟踪误差图。
18.图6为本发明非重复扰动下不同r跟踪性能图。
19.图7为本发明非重复扰动下在不同批次的输入轨迹图。
20.图8为本发明非重复扰动下在不同批次的输出轨迹图。
21.图9为本发明非重复扰动下在不同批次的更新律轨迹图。
22.图10为本发明非重复扰动下在不同批次的跟踪误差轨迹图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.本发明提供一种技术方案:一种工业过程多维容错预测控制方法,包括
25.步骤1.针对带有时滞的间歇过程,建立等价的多时滞新型误差模型;
26.步骤2.在新型误差模型基础上,基于多步预测思想建立2d
‑
roesser状态空间模型并给出性能指标表示;
27.步骤3.建立2d
‑
roesser状态空间模型的闭环控制系统,建立此系统具有不变集特性的充分条件;
28.步骤4.基于步骤1和3中的沿时间及批次方向上的预测模型,设计预测控制器及选取抗外界干扰的具有终端约束的性能指标函数,并给出预测模型的终端约束集是不变集的充分条件;
29.步骤5.针对选取的性能指标函数构建优化算法,获得沿时间及批次方向上的期望控制性能。
30.步骤1具体为
31.1.1构建如下带有时滞的间歇过程模型
[0032][0033]
其中,t和k分别表示运行的时间和批次;x(t s,k)∈r
n
,y(t,k)∈r
l
,u
f
(t,k)∈r
m
分别表示第k批次t时刻系统的带有时滞的状态变量,输出变量和在执行器故障下的输入变量;表示适维常数矩阵x
0,k
表示第k批次的初始状态,d
m
表示状态时滞的最大值;其中,i表示适维单位矩阵,ω(t,k)表示外部未知扰动;考虑部分失效故障α,系统输入信号为u(t,k),故此故障类型可表示如下:
[0034]
u
f
(t,k)=αu(t,k)
ꢀꢀꢀ
(2)
[0035][0036]
其中,α(α≤1)和为已知变量;
[0037]
定义
[0038][0039][0040]
α=diag[α1,α2,...,α
m
]
ꢀꢀꢀ
(6)
[0041]
α=diag[a1,α2,...,α
m
]
ꢀꢀꢀ
(7)
[0042]
因此,一个带有时滞和执行器故障的间歇过程可描述如下:
[0043][0044]
1.2建立等价的2d闭环状态空间模型
[0045]
1.2.1引入迭代学习控制策略
[0046]
针对式(1)的间歇过程,可利用迭代学习控制策略设计迭代学习控制律:
[0047][0048]
其中,u(t,0)表示迭代过程的初始值,通常置为零;r(t,k)∈r
m
表示待设计的迭代学习更新律;显然,迭代学习控制器u(t,k)的设计可以转化为更新律r(t,k)的设计,以使得控制输出y(t,k)能够尽可能地跟踪上参考输出y
r
(t);
[0049]
1.2.2定义跟踪误差变量
[0050]
e(t,k)=y(t,k)
‑
y
r
(t)
ꢀꢀꢀ
(10)
[0051]
同时定义一个沿批次方向的误差函数
[0052]
δf(t,k)=f(t,k)
‑
f(t,k
‑
1)
ꢀꢀꢀ
(11)
[0053]
其中,f可表示系统状态变量、输出变量、外部扰动;
[0054]
根据式(9)
‑
(11)可以得到
[0055]
[0056][0057]
令
[0058]
1.2.3扩展的等价2d
‑
roesser模型求得如下
[0059][0060]
其中,
[0061]
令令
[0062]
可以得到基于2d
‑
roesser模型的2d闭环状态空间模型
[0063][0064]
其中,
[0065]
1.2.4设计更新律如下:
[0066][0067]
步骤2具体为
[0068]
2.1在预测形式下建立基于2d
‑
roesser模型的2d状态空间模型如下
[0069][0070]
2.2选取mpc有限优化性能指标为
[0071][0072]
其中l(t i|t,k j|k)和v
t
(x(t n|t,k n|k)分别被称作阶段成本和终端成本。
[0073][0074]
其中,q和r为权重矩阵,τ是一个正的标量;
[0075]
2.3优化问题,可以描述为如下形式
[0076][0077]
其中,其中,是终端约束集,干扰和控制输入满足
[0078][0079][0080]
其中η是一个已知的常数,r
k
是更新律的第k个元素,
[0081]
步骤3具体为
[0082]
3.1集合ω
π,t
是一个rpi集,如果存在一个正的标量使得
[0083][0084]
其中
[0085]
表示在t时刻任意批次时作为rpi集ω,r作为相应的更新律;令lrf:定义其中相应的更新律为
[0086]
3.2集合ω
π,t
是一个rpi集,考虑系统(16),对于给定矩阵如果存在对称正定矩阵矩阵y∈r
(n l)
×
(n l)
,g∈r
(n l)
×
(n l)
,z∈r
(n l)
×
(n l)
,正标量使得下列的矩阵不等式可解:
[0087][0088][0089]
其中,其中,p=ξx
‑1,k=yg
‑1,则ω
π,t
是rpi集;
[0090]
3.2.1根据扩张引理
‑
g
t
x
‑1g≤x
‑
g
t
‑
g,对(23)左乘diag{g
‑
t
,g
‑
t
...,g
‑
t
,i,i,i,i},右乘其转置,可以得到
[0091][0092]
其中,
[0093]
3.2.2式(25)可以转化为如下形式:
[0094][0095]
其中对(26)使用schur引理,并对所得的不等式左乘以及右乘它
的转置,可以得到如下式子:
[0096][0097]
其中,
[0098]
3.2.3令那么(27)可以等价为
[0099][0100]
因为那么集合ω
π,t
是一个rpi集;
[0101]
3.3针对(24)式的证明:
[0102]
因为有
[0103][0104]
则运用shur补引理,可以得到控制输入约束条件是(24)。
[0105]
步骤4具体方法是
[0106]
4.1给出预测模型的终端约束集是不变集的充分条件,具体如下
[0107]
在t时刻任意批次的终端约束集应该满足两个条件,首先ω
π,t
是一个rpi集,其次是存在α1,α2∈κ
∞
,以及正定函数使得
[0108][0109][0110]
4.2式(30)可以通过求解正定矩阵的特征值的方法得到,
[0111]
其中,λ
min
:=min{ρ
min
(p)},λ
max
:=min{ρ
max
(p)},ρ
min
(
·
)和ρ
max
(
·
)分别代表最小和最大的特征值,因此得证;
[0112]
4.3主要的工作集中在证明条件式(31),具体证明如下:
[0113]
考虑系统(18),如果(23)、(24)成立,那么下列的矩阵不等式可解
[0114][0115]
是一个集rpi.其中对(32)左乘diag{g
‑
t g
‑
t
ꢀ…ꢀ
g
‑
t i i i i i i},右乘其转置,得到等价于下列的矩阵不等式
[0116][0117]
其中,
[0118]
令x
‑1=ξ
‑1p,式(33)可以写成
[0119][0120]
其中,σ=g k
t
rk
‑
γ0p,
[0121]
对(34)应用schur补引理,然后左乘右乘其转置,可以得到
[0122][0123]
因为则
[0124][0125]
那么下列的式子成立
[0126][0127]
因此,是一个终端约束集。
[0128]
步骤5具体方法是
[0129]
5.1由于前面提到rpi性质,终端约束集应该满足下列的条件
[0130][0131]
因此考虑下列的优化问题,
[0132]
minξ,使得
[0133]
的一个充分条件是
[0134][0135]
考虑(32)终端约束集的条件,τ可以最优化;取新变量η=τξ,因此η是最小化的;那么(32)可以写为
[0136][0137]
5.2基于预测模型的终端约束集是不变集的充分条件,设计优化控制算法步骤如下:
[0138]
a:得到系统所有的状态(含时滞)
[0139]
b:如果t=0,对于任一批次k,求解
[0140][0141]
使得(23),(24),(38),(39),得到了最优的λ记作λ
*
,继续到步骤c;
[0142]
否则t≠0,对于任一批次k,用λ
*
代替λ,从而解决
[0143][0144]
使得(23),(24),(38),(39),继续到步骤c;
[0145]
c:如果得到那么t=t 1,k=k,然后返回步骤a。
[0146]
下面结合附图和实例进一步分析解释本发明:
[0147]
本发明以非线性连续搅拌釜为控制对象进行仿真,包括以下两个微分方程
[0148][0149]
其中,c
a
是不可逆反应过程中a的浓度(a
→
b);t是反应器的温度;t
j
是冷却流的温度。作为操作变量,k0=2.53
×
10
19
(1/mol min),e/r=13,500(k),t(0)=25(℃),c
a
(0)=0.9(mol/l)。
[0150]
对于系统辨别,进行了26℃的传递测试,采样间隔为1。由此可以得出传递模型
[0151]
假设系统为二阶,采用带传递输入和传递响应的最小二乘法。
[0152]
x1(t,k)=y(t,k),x2(t,k)=
‑
0.0013y(t
‑
1,k) 0.0425u(t
‑
1,k)。传递函数可以转化为下列的状态空间模型:
[0153][0154]
离散后,对应状态空间模型的时滞扩展模型如下:
[0155][0156]
其中,c=[1 0],α=0.8。
[0157]
在这个仿真例子中,我们考虑的执行器故障是部分失效故障(α=0.8)。通过仿真实验,得到该控制方法下系统的跟踪性能、输入、输出、更新律和跟踪误差控制效果,验证了所提出的二维迭代学习预测容错控制器的有效性。
[0158]
在实际的工业过程中,干扰是不可避免的。本发明分别考虑重复干扰与非重复干扰的鲁棒性,进行了仿真。
[0159]
请参阅图1
‑
5,重复干扰ω(t,k)∈r2,ω(t,k)=cos(t)
×
[0.001 0.002]
t
。在这种情况下,ω(t,k)仅仅依靠于t,即ω(t,k)=ω(t)。
[0160]
请参阅图6
‑
10,对非重复性干扰的鲁棒性进行仿真研究。其中,非重复干扰ω(t,k)∈r2,ω(t,k)=(0.4δ
1 0.4δ2)
t
,δ1∈[
‑
1 1],δ2∈[
‑
1 1],ω(t,k)依赖于t和k。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。