一种基于多片式离合器的拖拉机pto控制系统及方法
技术领域
1.本发明涉及拖拉机控制技术领域,具体为一种基于多片式离合器的拖拉机pto控制系统及方法。
背景技术:
2.现阶段农业机械的使用中,拖拉机pto在反复的接合过程中会产生大量的热,目前市面上的拖拉机pto的温度只能通过被动式的散热来解决,缺乏一种不仅可以实时调温,同时又可以通过监测拖拉机行车状态对pto和节气门实时控制的控制系统。
3.当前市面上最常见的多片式离合器的散热主要是依靠摩擦片表面沟槽等被动式散热,其散热受表面沟槽长度、散热器材料等限制,无法在工作中将pto离合器的温度实时保持在一个合适的范围内;实验表明,多片式离合器在工作中,其摩擦片温度可以达约150度,离合器如果长期处于高温状态,常常会由于靠近摩擦片中间部位局部温度过高而产生热失稳,产生热斑和热弹性失效,最终导致离合器的可靠性下降,使用寿命降低。
4.同时,长期以来,拖拉机pto需要驾驶员使用操纵杆手动控制,复杂的操作使得驾驶员的操作负担很大,目前市面上虽然出现了电控湿式离合器。但这种离合器生产制造复杂、售后繁琐,也无法与节气门进行实时联动;为了解决上述问题,本发明提出了一种基于多片式离合器的拖拉机pto控制系统。
技术实现要素:
5.1、本发明要解决的技术问题
6.本发明的目的在于提供一种基于多片式离合器的拖拉机pto控制系统及方法,以解决上述背景技术中提出的问题:
7.现有拖拉机pto无法通过监测拖拉机的行车状态来实时调节的问题。
8.2、技术方案
9.为实现上述目的,本发明提供如下技术方案:
10.一种基于多片式离合器的拖拉机pto控制系统,包括拖拉机本体,所述拖拉机本体上连接有拖拉机pto和节气门调控模块,所述拖拉机pto内安装有多片式离合器,所述多片式离合器上安装有液力夹紧模块和温控模块;
11.所述液力夹紧模块包括有液力夹紧装置和位移传感器,所述多片式离合器上连接有离合器脚踏杆,所述液力夹紧装置固定套装在多片式离合器与二级变速机构之间,所述位移传感器与液力夹紧装置固定连接;
12.所述温控模块包含有温控表、流量调节阀和一个加热器,所述温控表安装于拖拉机本体的底盘上,所述拖拉机pto内还固定安装有润滑油箱,所述润滑油箱上设置有润滑油进油口和润滑油出油口,所述流量调节阀固定在润滑油出油口处,所述加热器固定安装在润滑油箱内;
13.所述节气门调节模块包括有节气门和旋转电机,所述节气门固定安装在拖拉机本
体上,所述旋转电机与节气门相连接,所述旋转电机的内部固定安装有编码器;
14.所述拖拉机本体上还安装有动力源,所述动力源的输出轴上固定连接有传动轮轴,所述拖拉机本体的底盘上固定安装有振幅传感器;
15.所述拖拉机本体的动力源上还连接有pto输入轴,所述pto输入轴远离拖拉机本体一端与拖拉机pto内的多片式离合器相连接,所述多片式离合器的输入端上固定安装有第一转速传感器和第一扭矩传感器,所述多片式离合器的输出端上固定安装有第一扭矩传感器和第二转速传感器;所述多片式离合器上还连接有二级变速机构,所述二级变速机构上同时固定连接有pto输出轴;所述拖拉机本体内安装有控制器和拖拉机仪表盘,所述拖拉机仪表盘内安装有显示器。
16.一种基于多片式离合器的拖拉机pto控制方法,包括以下步骤:
17.s1、系统进行自检,根据自检情况,判断是否满足运行条件,若满足,进入步骤2),否则系统进行初始化,等待系统满足条件;
18.s2、选择工作模式,当人工选择手动模式时,进入步骤3),当人工选择自动模式时,进入s4;
19.s3、用户通过pto离合器操纵杆控制拖拉机pto内的多片式离合器的离合;
20.s4、进入温控模块,利用温控表测量多片式离合器的润滑油温度,并判断所测温度是否在区间[a,b]内,得到第一工作指令;
[0021]
s5、根据s4所得的工作指令,对多片式离合器的润滑油温度进行调节;
[0022]
s6、进入液力夹紧模块,利用第一转速传感器测量pto多片式离合器输入端转速,并使用第二转速传感器测量pto多片式离合器输出端转速,判断转速差是否在[0,c]内,得到第二工作指令;
[0023]
s7、根据s6所得的工作指令,对pto多片式离合器输入端转速和输出端转速进行记录,记录值为
ɑ
;
[0024]
s8、利用振幅传感器测量工况路面平整情况,并判断所采集振幅的均方根高度是否在区间[d,e]内,得到第三工作指令;
[0025]
s9、根据s8所得的工作指令,对振幅的均方根高度进行记录,记录值为β;
[0026]
s10、利用拖拉机pto多片式离合器输出端上的第二扭矩传感器测量pto多片式离合器输入端扭矩,并使用第二扭矩传感器测量pto 多片式离合器输出端扭矩,判断pto多片式离合器输入端与输出端的扭矩差是否在[0,c]内,得到第四工作指令;
[0027]
s11、根据s10所得的工作指令,对pto多片式离合器输入端与输出端的扭矩差移进行记录,记录值为γ;
[0028]
s12、通过
ɑ
,β,γ的值,控制器得出最佳夹紧位移值x;得到第五工作指令;
[0029]
s13、根据s12所得的工作指令,对拖拉机pto内的多片式离合器进行调节,并通过位移传感器将多片式离合器调节位移反馈回控制器;
[0030]
s14、进一步利用第二转速传感器第二扭矩传感器测量pto多片式离合器输出端的转速和扭矩,得到第六工作指令;
[0031]
s15、根据s14所得工作指令,对拖拉机本体的节气门进行调节,通过控制器对节气门调节模块的旋转电机的旋转角度进行控制;
[0032]
s16、通过编码器对节气门的开合角度进行判断,得到第七工作指令;
[0033]
s17、根据s16中所得的工作指令,利用液力夹紧模块对多片式离合器进行调节;
[0034]
s18、完成中s17中多片式离合器的调节后,重复s4中的工作步骤,得到新的工作指令,并依次重复进行s4
‑
s17中所述操作步骤。
[0035]
优选地,所述s4中提到的温度测量具体包括以下操作:
[0036]
a1、通过温控表采集多片式离合器内润滑油油温;
[0037]
a2、将温控表的at探头固定在多片式离合器外层离合片上和冷却润滑油油箱内;
[0038]
a3、在拖拉机本体工作时,利用温控表实时获取多片式离合器和冷却润滑油油箱内油温大小,并将测得的温度数值实时传输给温控模块和显示器。
[0039]
优选地,所述s5中的温度控制具体包括以下操作:
[0040]
b1、若所测多片式离合器油温在温度区间[a,b]内,温度调控系统保持;
[0041]
b2、若所测温度大于温度区间[a,b],温度调控系统工作,流量调节阀打开,向多片式离合器内喷冷却润滑油,单位时间内,油从一个摩擦副带走的热量由下式计算:
[0042][0043]
式中:q
y
为冷却液从摩擦片上散走的热量
[0044]
t1,t2为冷却液入口和出口的温度
[0045]
τ
o
为冷却摩擦片的时间
[0046]
q
y
为1秒钟时间向一个摩擦副的供油量
[0047]
c
y
γ
y
为单位体积油的热容量
[0048]
冷却液比流量计算如下式:
[0049][0050]
式中:δq为比流量,即单位摩擦表面上的冷却液流量(m3/(m2*s);
[0051]
cγ为摩擦片单位体积热容量(j(kg.k));
[0052]
h为摩擦片的厚度(m);
[0053]
c
y
γ
y
为单位体积冷却液的热容量(j(kg.k));
[0054]
τ
o
为冷却摩擦片的时间(t);
[0055]
ξ为散热系数;
[0056]
ψ为摩擦副表面接触系数;
[0057]
t
p
为没有冷却液时摩擦片滑磨发热的平均温度;
[0058]
t0为摩擦片结合前的表面温度;
[0059]
t1为冷却液的初始温度;
[0060]
b3、若所测温度小于温度区间[a,b],温度调控系统工作,加热器工作,加热冷却润滑油油箱内的冷却润滑油,当加热温度达到温控表设定值b时,流量调节阀打开,向多片式离合器内喷冷却润滑油。
[0061]
优选地,所述s6中提到的转速测量具体包括以下操作:
[0062]
c1、通过第一转速传感器采集pto多片式离合器输入端转速;
[0063]
c2、通过第二转速传感器采集pto多片式离合器输出端转速;
[0064]
c3、第一转速传感器安装于pto多片式离合器输入端;
[0065]
c4、第二转速传感器安装于pto多片式离合器输出端;
[0066]
c5、在拖拉机工作时,利用第一转速传感器和第二转速传感器实时获取pto多片式离合器输入端和输出端转速,并将测得的速度数值实时传输给控制器和显示器。
[0067]
所述s7中提到的记录pto多片式离合器输入端和输出端转速差具体包括以下操作:
[0068]
d1、若所测pto多片式离合器输入端转速与pto多片式离合器输出端转速差在速度区间[0,c]内,记录转速差
ɑ
为0;
[0069]
d2、若所测pto多片式离合器输入端转速与pto多片式离合器输出端转速差高于速度区间[0,c],将转速差记录为
ɑ
。
[0070]
所述s8中提到的扭矩测量具体包括以下操作:
[0071]
e1、通过振幅传感器采集拖拉机本体的工况振幅;
[0072]
e2、振幅传感器安装于拖拉机本体的底盘上;
[0073]
e3、在拖拉机工作时,将振幅传感器采集的拖拉机本体的工况振幅实时传输给控制器和显示器,并计算拖拉机本体工况振幅的均方根高度。
[0074]
优选地,所述s9中提到的记录拖拉机工况振幅的均方根高度具体包括以下操作:
[0075]
f1、若所测拖拉机工况振幅的均方根高度在区间[d,e]内,记录均方根高度β为0;
[0076]
f2、若所测拖拉机工况振幅的均方根高度大于区间[d,e]内,将均方根高度记录为β。
[0077]
优选地,所述s10中提到的扭矩测量具体包括以下操作:
[0078]
g1、采用第一扭矩传感器获得pto多片式离合器输入端扭矩;
[0079]
g2、采用第二扭矩传感器获得pto多片式离合器输出端扭矩;
[0080]
g3、将第一扭矩传感器的一端连接pto多片式离合器输入端,另一端连接pto输入轴;
[0081]
g4、将第二扭矩传感器的一端连接pto多片式离合器输出端,另一端连接pto输出轴;
[0082]
g5、在拖拉机本体运作时,利用第一扭矩传感器和第二扭矩传感器实时获取pto多片式离合器输入端和输出端扭矩大小,并将测得的扭矩数值实时传输给控制器和显示器。
[0083]
所述s10中提到的记录pto多片式离合器输入端扭矩与pto多片式离合器输出端扭矩差,具体包括以下操作:
[0084]
h1、若所测pto多片式离合器输入端扭矩与pto多片式离合器输出端扭矩差在区间[0,f]内,记录扭矩差γ为0;
[0085]
h2、若pto多片式离合器输入端扭矩与pto多片式离合器输出端扭矩差大于区间[d,e],将扭矩差记录为γ。
[0086]
优选地,所述s12中提到的得出最佳夹紧位移值x具体包括以下操作:
[0087]
i1、将所记录的
ɑ
,β,γ值输入到控制器;
[0088]
i2、控制器通过计算,得出最佳夹紧位移值x。
[0089]
优选地,所述s13中提到的对拖拉机pto的多片式离合器进行调节具体包括以下操作:
[0090]
j1、若所得出的最佳夹紧位移值x小于等于0,液力夹紧模块保持不变;
[0091]
j2、若所得出的最佳夹紧位移值x大于0,液力夹紧模块工作,液力夹紧装置推动多片式离合器,使多片式离合器摩擦片压紧,pto 输入轴的扭矩、转速提高;
[0092]
j3、位移传感器将液力夹紧装置的位移传回给控制器,判断液力夹紧装置是否夹紧到位,所述扭矩与夹紧压力的变化函数关系为:
[0093]
①
离合片完全分离时:
[0094][0095]
式中,n
f
为摩擦面的个数,n
g
为摩擦片上沟槽个数,θ0为沟槽间角度,b为摩擦片的外半径,a为摩擦片的内半径,n为油液粘度,ω为离合器摩擦副转速差值,为patir因数,为cheng因数,h为油液的油膜厚度。
[0096]
②
离合片为滑磨状态时:
[0097][0098]
t
总
=t
v
t
c
[0099]
式中,n
f
为摩擦面的个数,n
g
为摩擦片上沟槽个数,θ0为沟槽间角度,b为摩擦片的外半径,a为摩擦片的内半径,μ
c
为动摩擦系数, p
c
摩擦副受到的压强,由位移传感器通过液力夹紧装置的位移计算得出。
[0100]
j4、控制器将当前液力夹紧装置的位移量按接合率显示在显示器上,所述接合率变化函数为:
[0101]
p=(x
÷
x
总
)*100%
[0102]
式中,x为当前液力夹紧装置的位移值,x
总
为液力夹紧装置的最大位移值。
[0103]
优选地,所述s15~s16中提到的对节气门的调节,具体包括以下步骤:
[0104]
k1、根据第二转速传感器第二扭矩传感器测量所得的pto多片式离合器输出端的转速和扭矩,将其传输给控制器;
[0105]
k2、控制器计算得出旋转电机的最佳旋转量,并控制旋转电机旋转相应角度,使得节气门达到最佳开合角度;
[0106]
k3、编码器采集旋转电机的旋转角度,判断旋转电机是否旋转到位;
[0107]
k4、若旋转角度到位,直接控制液力夹紧模块使多片式离合器松开,若旋转角度不到位,则重复k3所述操作。
[0108]
3、有益效果
[0109]
本发明所提出的基于多片式离合器的拖拉机pto控制系统及方法,改变了现有的拖拉机pto的离合器的控制方式,是通过测量拖拉机pto多片式离合器输入端和输出端转速差和扭矩差,以及测量并计算拖拉机本体工况路面振幅的均方根高度,使用控制器计算多片式离合器的液力夹紧装置的最佳夹紧位移和节气门最佳开度程度,来实时地调整拖拉机pto的多片式离合器的闭合程度和节气门最佳开度程度;同时通过测量多片式离合器内油温,判断油温是否超出温度临界值,来实时地调整多片式离合器内润滑油油温。
附图说明
[0110]
图1为本发明提出的一种基于多片式离合器的拖拉机pto控制方法的总体方法流程示意图;
[0111]
图2为本发明提出的一种基于多片式离合器的拖拉机pto控制方法的控制模块框图;
[0112]
图3为本发明提出的一种基于多片式离合器的拖拉机pto控制方法的温控模块油箱加热系统逻辑框图;
[0113]
图4为本发明提出的一种基于多片式离合器的拖拉机pto控制方法的温控模块冷却系统逻辑框图;
[0114]
图5为本发明提出的一种基于多片式离合器的拖拉机pto控制方法的液力夹紧模块的动作逻辑框图;
[0115]
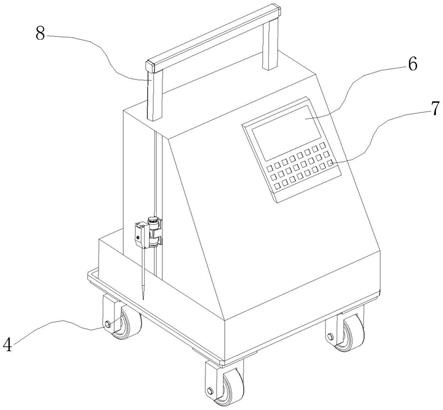
图6为本发明提出的一种基于多片式离合器的拖拉机pto控制系统的拖拉机本体概念结构示意图;
[0116]
图7为本发明提出的一种基于多片式离合器的拖拉机pto控制系统的温控模块概念结构示意图;
[0117]
图8为本发明提出的一种基于多片式离合器的拖拉机pto控制系统的pto概念结构示意图。
[0118]
图中标号说明:
[0119]
1、液力夹紧模块;2、温控模块;3、液力夹紧装置;4、位移传感器;5、温控表;6、流量调节阀;7、加热器;8、润滑油进油口; 9、润滑油出油口;10、第一转速传感器;11、第一扭矩传感器;12、振幅传感器;13、第二扭矩传感器;14、第二转速传感器;15、控制器;16、显示器;17、pto输入轴;18、拖拉机pto;19、多片式离合器;20、二级变速机构;21、pto输出轴;22、节气门调节模块; 23、编码器。
具体实施方式
[0120]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0121]
实施例1:
[0122]
请参阅图1
‑
8,一种基于多片式离合器的拖拉机pto控制系统,包括拖拉机本体,拖拉机本体上连接有拖拉机pto18和节气门调控模块22,拖拉机pto18内安装有多片式离合器19,多片式离合器19 上安装有液力夹紧模块1和温控模块2;
[0123]
液力夹紧模块1包括有液力夹紧装置3和位移传感器4,多片式离合器19上连接有离合器脚踏杆,液力夹紧装置3固定套装在多片式离合器19与二级变速机构20之间,位移传感器4与液力夹紧装置 3固定连接;
[0124]
温控模块2包含有温控表5、流量调节阀6和一个加热器7,温控表5安装于拖拉机本体的底盘上,拖拉机pto18内还固定安装有润滑油箱,润滑油箱上设置有润滑油进油口8和润滑油出油口9,流量调节阀6固定在润滑油出油口9处,加热器7固定安装在润滑油箱内;
[0125]
节气门调节模块22包括有节气门和旋转电机,节气门固定安装在拖拉机本体上,旋转电机与节气门相连接,旋转电机的内部固定安装有编码器23;
[0126]
拖拉机本体上还安装有动力源,动力源的输出轴上固定连接有传动轮轴,拖拉机本体的底盘上固定安装有振幅传感器12;
[0127]
拖拉机本体的动力源上还连接有pto输入轴17,pto输入轴17 远离拖拉机本体一端与拖拉机pto18内的多片式离合器19相连接,多片式离合器19的输入端上固定安装有第一转速传感器10和第一扭矩传感器11,多片式离合器19的输出端上固定安装有第二扭矩传感器13和第二转速传感器14;多片式离合器19上还连接有二级变速机构20,二级变速机构20上同时固定连接有pto输出轴21;拖拉机本体内安装有控制器15和拖拉机仪表盘,拖拉机仪表盘内安装有显示器16。
[0128]
一种基于多片式离合器的拖拉机pto控制方法,包括以下步骤:
[0129]
s1、系统进行自检,根据自检情况,判断是否满足运行条件,若满足,进入步骤2,否则系统进行初始化,等待系统满足条件;
[0130]
s2、选择工作模式,当人工选择手动模式时,进入步骤3,当人工选择自动模式时,进入s4;
[0131]
s3、用户通过pto离合器操纵杆控制拖拉机pto18内的多片式离合器19的离合;
[0132]
s4、进入温控模块2,利用温控表5测量多片式离合器19的润滑油温度,并判断所测温度是否在区间[a,b]内,得到第一工作指令;
[0133]
s4中提到的温度测量具体包括以下操作:
[0134]
a1、通过温控表5采集多片式离合器19内润滑油油温;
[0135]
a2、将温控表5的at探头固定在多片式离合器19外层离合片上和冷却润滑油油箱内;
[0136]
a3、在拖拉机本体工作时,利用温控表5实时获取多片式离合器19和冷却润滑油油箱内油温大小,并将测得的温度数值实时传输给温控模块2和显示器16;
[0137]
s5、根据s4所得的工作指令,对多片式离合器19的润滑油温度进行调节;
[0138]
s5中的温度控制具体包括以下操作:
[0139]
b1、若所测多片式离合器19油温在温度区间[a,b]内,温度调控系统保持;
[0140]
b2、若所测温度大于温度区间[a,b],温度调控系统工作,流量调节阀6打开,向多片式离合器19内喷冷却润滑油,单位时间内,油从一个摩擦副带走的热量由下式计算:
[0141][0142]
式中:q
y
为冷却液从摩擦片上散走的热量j
[0143]
t1,t2为冷却液入口和出口的温度℃
[0144]
τ
o
为冷却摩擦片的时间s
[0145]
q
y
为1秒钟时间向一个摩擦副的供油量m3/s
[0146]
c
y
γ
y
为单位体积油的热容量j/(kg.k)
[0147]
冷却液比流量计算如下式:
[0148]
[0149]
式中:δq为比流量,即单位摩擦表面上的冷却液流量(m3/(m2*s);
[0150]
cγ为摩擦片单位体积热容量(j(kg.k));
[0151]
h为摩擦片的厚度(m);
[0152]
c
y
γ
y
为单位体积冷却液的热容量(j(kg.k));
[0153]
τ0为冷却摩擦片的时间(t);
[0154]
ξ为散热系数;
[0155]
ψ为摩擦副表面接触系数;
[0156]
t
p
为没有冷却液时摩擦片滑磨发热的平均温度℃;
[0157]
t0为摩擦片结合前的表面温度℃;
[0158]
t1为冷却液的初始温度℃;
[0159]
b3、若所测温度小于温度区间[a,b],温度调控系统工作,加热器 7工作,加热冷却润滑油油箱内的冷却润滑油,当加热温度达到温控表5设定值b时,流量调节阀6打开,向多片式离合器19内喷冷却润滑油;
[0160]
s6、利用第一转速传感器10测量pto多片式离合器输入端转速,并使用第二转速传感器14测量pto多片式离合器输出端转速,判断 pto多片式离合器输入端与输出端的转速差是否在[0,c]内,得到第二工作指令;
[0161]
s6中提到的转速测量具体包括以下操作:
[0162]
c1、通过第一转速传感器(10)采集pto多片式离合器输入端转速;
[0163]
c2、通过第二转速传感器(14)采集pto多片式离合器输出端转速;
[0164]
c3、第一转速传感器(10)安装于pto多片式离合器输入端;
[0165]
c4、第二转速传感器(14)安装于pto多片式离合器输出端;
[0166]
c5、在拖拉机工作时,利用第一转速传感器(10)和第二转速传感器(14)实时pto多片式离合器输入端转速大小和拖拉机pto 多片式离合器输出端转速,并将测得的速度数值实时传输给控制器 (15)和显示器(16);
[0167]
s7、根据s6所得的工作指令,pto多片式离合器输入端转速与输出端转速差进行记录,记录值为
ɑ
;
[0168]
s7中提到的记录pto多片式离合器输入端转速与输出端转速差具体包括以下操作:
[0169]
d1、若所测pto多片式离合器输入端转速与pto多片式离合器输出端转速差在速度区间[0,c]内,记录转速差
ɑ
为0;
[0170]
d2、若所测pto多片式离合器输入端转速与pto多片式离合器输出端转速差高于速度区间[0,c],将转速差记录为
ɑ
。
[0171]
s8中提到的振幅测量具体包括以下操作:
[0172]
e1、通过振幅传感器12采集拖拉机本体的工况振幅;
[0173]
e2、振幅传感器12安装于拖拉机本体的底盘上;
[0174]
e3、在拖拉机工作时,将振幅传感器12采集的拖拉机本体的工况振幅实时传输给控制器15和显示器16,并计算拖拉机本体工况振幅的均方根高度;
[0175]
s8、利用振幅传感器12测量工况路面平整情况,并判断所采集振幅的均方根高度是否在区间[d,e]内,得到第三工作指令;
[0176]
s9、根据s8所得的工作指令,对振幅的均方根高度进行记录,记录值为β;
[0177]
s9中提到的记录拖拉机工况振幅的均方根高度具体包括以下操作:
[0178]
f1、若所测拖拉机工况振幅的均方根高度在区间[d,e]内,记录均方根高度β为0;
[0179]
f2、若所测拖拉机工况振幅的均方根高度大于区间[d,e]内,将均方根高度记录为β;
[0180]
s10、利用pto多片式离合器输出端上的第一扭矩传感器11测量pto多片式离合器输入端扭矩,并使用第二扭矩传感器13测量 pto多片式离合器输出端的扭矩,判断pto多片式离合器输入端与输出端的扭矩差是否在[0,c]内,得到第四工作指令;
[0181]
s10中提到的扭矩测量具体包括以下操作:
[0182]
g1、采用第一扭矩传感器11获得pto多片式离合器输入端扭矩;
[0183]
g2、采用第二扭矩传感器13获得pto多片式离合器输出端扭矩;
[0184]
g3、将第一扭矩传感器11的一端连接pto多片式离合器输入端,另一端连接pto输入轴17;
[0185]
g4、将第二扭矩传感器13的一端连接pto多片式离合器输出端,另一端连接pto输出轴21;
[0186]
g5、在拖拉机本体运作时,利用第一扭矩传感器11和第二扭矩传感器13实时获取pto多片式离合器输入轴和输出轴的扭矩大小,并将测得的扭矩数值实时传输给控制器15和显示器16;
[0187]
s10中提到的记录拖拉机pto多片式离合器输入端扭矩与pto 多片式离合器输出端扭矩差具体包括以下操作:
[0188]
h1、若所测pto多片式离合器输入端扭矩与pto多片式离合器输出端扭矩差在区间[0,f]内,记录扭矩差γ为0;
[0189]
h2、若pto多片式离合器输入端扭矩与pto多片式离合器输出端扭矩差大于区间[d,e],将扭矩差记录为γ;
[0190]
s11、根据s10所得的工作指令,对pto多片式离合器输入端与输出端扭矩差移进行记录,记录值为γ;
[0191]
s12、通过
ɑ
,β,γ的值,控制器15得出最佳夹紧位移值x;得到第五工作指令;
[0192]
s12中提到的得出最佳夹紧位移值x具体包括以下操作:
[0193]
i1、将所记录的
ɑ
,β,γ值输入到控制器15;
[0194]
i2、控制器15通过计算,得出最佳夹紧位移值x;
[0195]
s13、根据s12所得的工作指令,对拖拉机pto18内的多片式离合器19进行调节,并通过位移传感器4将多片式离合器19调节位移反馈回控制器15;
[0196]
s13中提到的对拖拉机pto18的多片式离合器19进行调节具体包括以下操作:
[0197]
j1、若所得出的最佳夹紧位移值x小于等于0,液力夹紧模块1 保持不变;
[0198]
j2、若所得出的最佳夹紧位移值x大于0,液力夹紧模块1工作,液力夹紧装置3推动多片式离合器9,使多片式离合器9摩擦片压紧, pto输入轴17的扭矩、转速提高;
[0199]
j3、位移传感器4将液力夹紧装置3的位移传回给控制器15,判断液力夹紧装置3是否夹紧到位,扭矩与夹紧压力的变化函数关系为:
①
离合片完全分离时:
[0200][0201]
式中,n
f
为摩擦面的个数,n
g
为摩擦片上沟槽个数,θ0为沟槽间角度,b为摩擦片的外半径,a为摩擦片的内半径,n为油液粘度,ω为离合器摩擦副转速差值,为patir因数,为cheng因数,h为油液的油膜厚度。
[0202]
②
离合片为滑磨状态时:
[0203][0204]
t
总
=t
v
t
c
[0205]
式中,n
f
为摩擦面的个数,n
g
为摩擦片上沟槽个数,θ0为沟槽间角度,b为摩擦片的外半径,a为摩擦片的内半径,μ
c
为动摩擦系数, p
c
摩擦副受到的压强,由位移传感器4通过液力夹紧装置3的位移计算得出。
[0206]
j4、控制器15将当前液力夹紧装置3的位移量按接合率显示在显示器上14,接合率变化函数为:
[0207]
p=(x
÷
x
总
)*100%
[0208]
式中,x为当前液力夹紧装置3的位移值,x
总
为液力夹紧装置3 的最大位移值。
[0209]
s14、进一步利用第二转速传感器11与第二扭矩传感器13测量所得的pto多片式离合器输出端的转速和扭矩,得到第六工作指令;
[0210]
s15、根据s14所得工作指令,对拖拉机本体的节气门进行调节,通过控制器15对节气门调节模块22的旋转电机的旋转角度进行控制;
[0211]
s16、通过编码器23对节气门的开合角度进行判断,得到第七工作指令;
[0212]
s15~s16中提到的对节气门的调节,具体包括以下步骤:
[0213]
k1、根据第二转速传感器11第二扭矩传感器13测量所得的pto 多片式离合器输出轴的转述和扭矩数值,将其传输给控制器15;
[0214]
k2、控制器15计算得出旋转电机的最佳旋转量,并控制旋转电机旋转相应角度,使得节气门达到最佳开合角度;
[0215]
k3、编码器23采集旋转电机的旋转角度,判断旋转电机是否旋转到位;
[0216]
k4、若旋转角度到位,直接控制液力夹紧模块1使多片式离合器松开,若旋转角度不到位,则重复k3操作;
[0217]
通过设置有节气门以及节气门调节模块22,能够防止负载过大导致发动机喘振或者熄火,若扭矩或者转速太大,就把节气门开到最大;若节气门开到最大时依然负载过高,即控制多片式离合器松开,对发动机起到保护作用;
[0218]
s17、根据s16中所得的工作指令,利用液力夹紧模块1对多片式离合器19进行调节;
[0219]
s18、完成中s17中多片式离合器的调节后,重复s4中的工作步骤,得到新的工作指令,并依次重复进行s4
‑
s17中操作步骤。
[0220]
本发明所提出的基于多片式离合器的拖拉机pto控制系统及方法,改变了现有的拖拉机pto18的离合器的控制方式,是通过测量 pto多片式离合器输入端与输出端的转速
和扭矩差,,以及测量并计算拖拉机本体工况路面振幅的均方根高度,使用控制器15计算多片式离合器19的液力夹紧装置3的最佳夹紧位移和最佳节气门开度程度,来实时地调整拖拉机pto18的多片式离合器19的闭合程度和节气门的开度程度;同时通过测量多片式离合器19内油温,判断油温是否超出温度临界值,来实时地调整多片式离合器19内润滑油油温。
[0221]
实施例2:
[0222]
请参考图1
‑
2,结合实施例1的基础有所不同之处在于,本发明所涉及的行车状态来实时的控制拖拉机pto的输出情况,目的是能够简化拖拉机驾驶员的操作,使用本发明之中的控制系统,均在本发明的保护范围之内。
[0223]
以后挂排种器为例,一般的小麦播种机规定的工作速度为 5km/h~11km/h,pto转速为360r/min~720r/min。
[0224]
首先是pto控制系统在拖拉机启动后进行自检,检查各传感器是否正常工作,当检查完毕,各传感器符合运行条件后,用户选择 pto控制系统的工作模式,当用户操作pto离合器操纵杆时,控制器15切断液力夹紧装置3的供电,进入手动控制模式;如果用户没有操作离合器操纵杆,pto离合器控制系统工作;利用温控表5测量多片式离合器19润滑油温度,并判断所测温度是否在区间[a,b]内,若油温在区间[a,b]内,则不动作;若油温小于设定值a,则加热器7 启动,加热到设定值b后,流量调节阀6打开,向多片式离合器19 内喷冷却润滑油,提高多片式离合器19内润滑油油温;若油温大于设定值b,则流量调节阀6打开,向多片式离合器19内喷冷却润滑油,降低多片式离合器19内润滑油油温,温控表5继续采集多片式离合器19内润滑油油温,形成一个闭环控制操作。温控表5安装于安装于底盘上,流量调节阀6安装于润滑油出油口9处,加热器7安装于润滑油箱内。
[0225]
同时,采用第一转速传感器10和第二转速传感器14分别采集 pto多片式离合器输入端和pto多片式离合器输出端转速;第一转速传感器10和第二转速传感器14分别安装于pto多片式离合器输入端和pto多片式离合器输出端上;拖拉机运作时,第一转速传感器10和第二转速传感器14可以将拖拉机pto多片式离合器输入端和输出端转速实时传输给控制器15和显示屏16,控制器15计算pto 多片式离合器输入端和输出端转速差,并将数值记录为
ɑ
,同时,通过振幅传感器12采集拖拉机本体工况振幅,振幅传感器12安装于拖拉机本体的底盘上,在拖拉机工作时,振幅传感器12采集的拖拉机本体工况振幅实时传输给控制器15和显示器16,控制器15计算拖拉机工况振幅的均方根高度,并将数值记录为β。同时,采用第一扭矩传感器11和第二扭矩传感器13分别采集pto多片式离合器输入端所受扭矩和pto多片式离合器输出端所受扭矩,第一扭矩传感器 11的一端连接pto多片式离合器输入端,另一端连接pto输入轴 17,第二扭矩传感器13的一端连接pto多片式离合器输出端,另一端连接pto输出轴21;在拖拉机本体工作时,第一扭矩传感器11 和第二扭矩传感器13将pto多片式离合器输入端所受扭矩和pto 多片式离合器输出端所受扭矩实时传输给控制器15和显示屏16,控制器15计算扭矩差,并将数值记录为γ;控制器15通过计算
ɑ
,β,γ值和最佳夹紧量x之间的关系,得出最佳夹紧位移x,并控制液力夹紧装置3动作,使拖拉机pto18的多片式离合器19闭合;所述的多片式离合器19参数由用户在使用前输入控制器15。紧接着,位移传感器4将实际夹紧位移量回传给控制器15,若实际位移量小于最佳夹紧位移x,则继续夹紧动作;若实际位移量等于最佳夹紧位移x,则停止夹紧;若实际位移量大于最佳夹紧位移x,则液力夹紧装置3 松开到最佳夹紧位移x。同时,控制器15计算离合器接合率,并显示在
显示器16上。同时,第二转速传感器11和第二扭矩传感器13 测量所得的pto多片式离合器输出端的转述和扭矩数值,将其传输给控制器15;控制器15计算得出旋转电机的最佳旋转量,并控制旋转电机旋转相应角度,使得节气门达到最佳开合角度;编码器23采集旋转电机的旋转角度,判断旋转电机是否旋转到位;若旋转角度到位,直接控制液力夹紧模块1使多片式离合器松开,若旋转角度不到位,则继续旋转到位;通过设置有节气门以及节气门调节模块22,能够防止负载过大导致发动机喘振或者熄火,若扭矩或者转速太大,就把节气门开到最大;若节气门开到最大时依然负载过高,即控制多片式离合器松开,对发动机起到保护作用;
[0226]
带来的效果就是小麦播种机的播种速度可以通过监测拖拉机的速度,地表平整度,和地面坡度来实时调控,使小麦播种机的播种速度一种处在一个高效区间。
[0227]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。