1.本发明属于上行助推器技术领域,具体涉及一种穿戴式自重力为动力的上行助推器。
背景技术:
2.目前,在山区生活的群众,在劳动、出行等过程中都需要负重上行,体力消耗非常大。另外,随着人口老龄化时代到来,居住楼房的老人数量逐渐增多,而城市中仍然存在大量未安装电梯的楼房。对于这部分住房,老人上楼比较困难。由此,研制一种上行助力装置是非常必要的。但是,除了市场中有一种直线推进器(直线电机)以外,其他外骨骼类上推助力产品,都需要蓄电池等外动力,还要有传感器或电脑操控,这样就造成了结构复杂,重量增加、价格昂贵,上行助推工作全部依赖外动力,这是一个明显的缺陷。另外,现有的上行助推器多为半身穿戴式,从脚掌一直延伸到腰部,为配合人体本身关节结构,采用多处模拟人体关节的铰接结构,导致上行助推器在使用过程中力的损耗较大,助力较小。
技术实现要素:
3.根据上述技术存在的缺陷,本发明的目的是提供一种穿戴式自重力为动力的上行助推器,其特点是利用特殊的机械传导结构,将使用者上行时自身压力转变为上行推力,形成一种特殊而有效的助推力学构型。其结构简单,无需外动力,且动力的损耗较小,易于操作,方便携带,价格低廉。
4.为实现上述目的,本发明所采用的技术方案为:穿戴式自重力为动力的上行助推器,包括底板、踏板、传动组件和上推组件;底板和踏板之间通过弹性元件连接,所述传动组件包括转换机构、第一齿条和第二齿条;所述转换机构设置在连接壳体上,上推组件滑动连接在连接壳体内,所述连接壳体固定在踏板上,第一齿条固定在底板上并与转换机构啮合连接,第二齿条与转换机构啮合并与上推组件固定连接;所述踏板通过弹性元件压缩向底板靠近时,第一齿条和第二齿条通过转换机构的传动,带动上推组件与连接壳体相对滑动。
5.基于上述技术方案,上行助推器一套为两件,配套使用,通过连接壳体将上行助推器固定在小腿上,使用者站在踏板上,连接壳体包裹住小腿,上推组件延伸至大腿。脚部双层鞋套踏板、弹性元件、底板相配合的结构,登楼梯时,膝关节弯曲,上推组件抵住膝盖处大腿下侧,向下踩踏板,弹性元件可以为向下的踩踏动作预留下推空间,踏板向下推压运动并与底板逐渐靠近,连接在连接壳体上的转换机构与固定在底板上的第一齿条配合,转换机构与第二齿条配合,从而使第二齿条相对于踏板向上移动,第二齿条与上推组件固定连接,相当于上推组件相对于踏板向上移动,由于踏板位置相当于人脚部位置,踏板到连接壳体的长度不变,连接壳体相对于小腿的位置不变,上推组件相对于连接壳体向上滑动,给正在施力的大腿(膝盖上方处)向上的推力,使用者在每次攀登一层楼梯时,上行助推器提供一个向上的力,减小使用者上行负担,满足助推需要。
6.优选的,为兼顾齿条的强度和成本,第一齿条和第二齿条的齿槽部分采用碳纤维
材料等轻型材料,齿槽外的套管硬塑料压模成型。
7.进一步地,所述弹性元件为弹簧组,踏板前端与底板设置为一个整体,后端分叉成v型并通过弹簧组连接。
8.进一步地,所述连接壳体上设置第一限制组件和第二限制组件,第一限制组件限制第一齿条与转换机构保持配合,第二限制组件限制第二齿条与转换机构保持配合,所述限制组件为限位轴承或限位滑轮。
9.基于上述技术方案,第一限制组件设置在第一齿条远离转换机构的一侧,第二限制组件设置在第二齿条远离转换机构的一侧,限制组件与转换机构从两侧夹持齿条,起到稳定齿条作用的同时,也可以在转换机构带动第二齿条的同时向上助推。
10.进一步地,所述上推组件包括滑动臂和助力臂,所述滑动臂与连接壳体内腔滑动连接,滑动臂远离连接壳体的一端与助力臂内腔连接。
11.进一步地,所述滑动臂和助力臂内部空心设置。便于减轻整套装置的重量。
12.进一步地,所述连接壳体与小腿配合绑紧;连接壳体下部与护盖可拆卸连接,传动组件设置在护盖内;连接壳体上部设置与滑动臂配合滑动的空腔,第二齿条贯穿连接壳体延伸至空腔内并与滑动臂连接;滑动臂靠近第二齿条的一端的滑动面设置为锥形滑动面。
13.进一步地,所述上推组件安装有菱形折叠伸缩支架,菱形折叠伸缩支架由若干菱形单元组合形成,并沿若干菱形单元的中间铰点的连线方向进行伸缩;菱形折叠伸缩支架顶端的菱形单元的中间铰点与助力臂固定,菱形折叠伸缩支架底端的菱形单元的两个中间铰点中,一个中间铰点与连接壳体固定,另一个中间铰点与滑动臂固定,通过连接壳体与滑动臂产生相对滑动,改变底端的菱形单元的两个中间铰点之间的距离,并将形变依次传递至相邻的菱形单元,从而进行伸缩;所述滑动臂上部与助力臂内腔滑动连接,助力臂远离滑动臂的一端设置与大腿配合的弧形推板。
14.基于上述技术方案,需要说明的是,菱形折叠伸缩支架由若干个菱形单元组成,相邻两个菱形单元之间的邻边为两根支杆形成的x型结构,其中间的交叉点为中间铰点,若干个菱形单元中所有的连接点都是铰点,每个菱形单元具有两个侧铰点和两个中间铰点,相邻两个菱形单元共用一个中间铰点,改变相邻两个中间铰点之间的距离,可以改变菱形折叠伸缩支架的伸缩长度。菱形折叠伸缩支架伸缩带动助力臂上下移动,助力臂以滑动臂作为导向沿竖直方向进行移动。菱形折叠伸缩支架安装在上推组件的侧表面,不影响上推组件的上下滑动,并且便于拆卸,改变菱形单元的数量,从而改变伸缩长度。
15.进一步地,所述第一齿条和第二齿条位于底板的中心位置。避免下踏时重心偏移,造成第一齿条、第二齿条和转换机构之间的啮合动作卡死或脱齿。
16.进一步地,所述转换机构包括主动齿轮、从动齿轮和转换齿轮,主动齿轮、从动齿轮和转换齿轮均设置在连接壳体上,第一齿条与主动齿轮啮合连接,第二齿条与从动齿轮啮合连接,主动齿轮通过转换齿轮带动从动齿轮旋转。
17.进一步地,所述主动齿轮与转换齿轮啮合连接,转换齿轮与从动齿轮啮合连接,主动齿轮与从动齿轮同向旋转,第一齿条的齿槽和第二齿条的齿槽同向设置,所述踏板通过弹性元件压缩向底板靠近时,第二齿条相对于从动齿轮向上运动。
18.进一步地,所述主动齿轮与转换齿轮同轴设置,转换齿轮与从动齿轮啮合连接,主动齿轮与从动齿轮反向旋转,第一齿条的齿槽和第二齿条的齿槽同向设置,主动齿轮的齿
数大于转换齿轮的齿数,所述踏板通过弹性元件压缩向底板靠近时,第二齿条相对于从动齿轮向下运动。
19.进一步地,所述第二齿条顶部通过菱形折叠伸缩支架连接至上推组件,第二齿条与菱形折叠伸缩支架的端部中间铰点相连,第二齿条外部设置有挡块,挡块与形成端部中间铰点的两根端部支杆相接触,挡块阻挡两根端部支杆向下运动并迫使其改变角度。
20.进一步地,所述转换机构包括啮合齿轮,第一齿条的齿槽和第二齿条的齿槽同向设置并与啮合齿轮相啮合,所述踏板通过弹性元件压缩向底板靠近时,啮合齿轮旋转,第二齿条相对于从动齿轮向上运动。
21.进一步的,所述踏板后端转动连接上下转动块状体。上下转动块状体用于固定底板和踏板之间的角度。
22.本发明的有益效果为:本发明的上行助推器能够将自身重力转化为上行的推力,对腿部的受力部位进行上推助力,结构简单,使用方便,无需外接动力设备,轻便灵活,助推力损耗较小。
附图说明
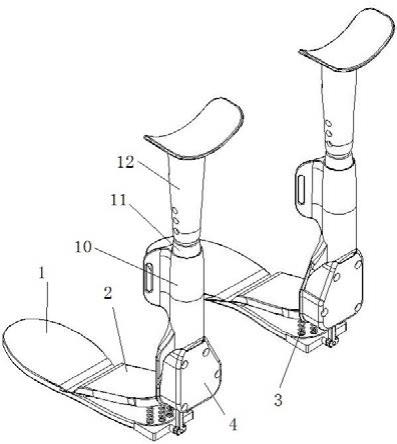
23.图1为上行助推器总装图(无菱形折叠伸缩支架);图2为实施例2的局部拆解图(无菱形折叠伸缩支架);图3为实施例3的局部拆解图(无菱形折叠伸缩支架);图4为侧装式菱形折叠伸缩支架伸长示意图;图5为内装式菱形折叠伸缩支架收缩示意图;图6为内装式菱形折叠伸缩支架伸长示意图;图中:1、底板, 2、踏板, 3、弹簧组, 4、护盖, 5、第一齿条, 6、第二齿条, 7、主动齿轮, 8、从动齿轮, 9、转换齿轮, 10、连接壳体, 11、滑动臂, 12、助力臂, 13、菱形折叠伸缩支架,13.1、中间铰点,14、挡块。
具体实施方式
24.为了使本发明的结构和功能更加清晰,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
25.实施例1参见附图1,穿戴式自重力为动力的上行助推器,包括底板1、踏板2、传动组件和上推组件;底板和踏板之间通过弹性元件连接,所述传动组件包括啮合齿轮、第一齿条5和第二齿条6;所述啮合齿轮设置在连接壳体10上,上推组件滑动连接在连接壳体内,所述连接壳体固定在踏板上,第一齿条固定在底板上并与啮合齿轮啮合连接,第二齿条与啮合齿轮啮合并与上推组件固定连接;第一齿条5的齿槽和第二齿条6的齿槽同向设置,所述踏板通过弹性元件压缩向底板靠近时,第一齿条保持不动,啮合齿轮沿第一齿条向下移动并旋转,啮合齿轮旋转使与之啮合的第二齿条向上移动,从而带动上推组件向上移动。给正在施力的大腿(膝盖下方大腿处)向上的推力,减小使用者上行负担,满足助推需要。需要说明的是第二齿条下部处于悬空位置,仅仅依靠啮合齿轮的啮合为动力进行移动。
26.进一步地,所述第一齿条和第二齿条位于底板的中心位置前后设置。避免下踏时
重心偏移,造成第一齿条、第二齿条和转换机构之间的啮合动作卡死或脱齿。为兼顾齿条的强度和成本,第一齿条和第二齿条的齿槽部分采用碳纤维材料,齿槽外的套管硬塑料压模成型。
27.进一步地,所述弹性元件为弹簧组3,踏板前端与底板设置为一个整体,后端分叉成v型并通过弹簧组连接。每次下踏动做完成后,通过弹簧组将踏板后端复位。
28.进一步地,所述连接壳体上设置第一限位滑轮和第二限位滑轮,第一限位滑轮限制第一齿条与啮合齿轮保持啮合,第一限位滑轮设置在第一齿条远离啮合齿轮的一侧;第二限位滑轮限制第二齿条与啮合齿轮保持啮合,第二限位滑轮设置在第二齿条远离啮合齿轮的一侧,限位滑轮与啮合齿轮从两侧夹持齿条,起到稳定齿条作用的同时,也可以在啮合齿轮带动第二齿条的同时向上助推。
29.优选的,可以用限位轴承代替限位滑轮。
30.进一步地,所述上推组件包括滑动臂11和助力臂12,所述滑动臂与连接壳体内腔滑动连接,滑动臂远离连接壳体的一端与助力臂内腔连接。滑动臂和助力臂内部空心设置。便于减轻整套装置的重量。所述连接壳体与小腿配合绑紧;连接壳体下部与护盖4可拆卸连接,传动组件设置在护盖内,起到保护作用;连接壳体上部设置与滑动臂配合滑动的空腔,第二齿条贯穿连接壳体延伸至空腔内并与滑动臂连接;滑动臂靠近第二齿条的一端的滑动面设置为锥形滑动面。
31.进一步地,滑动臂与助力臂可以采用固定连接或滑动连接。采用固定连接方式时,助力臂上升距离与踏板下移距离相同,可以通过不同高度的连接螺栓孔来调整滑动臂与助力臂的相对位置,控制整个上升组件起升到位的极限位置,适用于不同高度的人群。采用滑动连接方式时,为了达到使助力臂上升高度达到倍增的效果,可以加装辅助件,所述上推组件安装有菱形折叠伸缩支架,菱形折叠伸缩支架顶端的菱形单元的中间铰点与助力臂固定,菱形折叠伸缩支架底端的菱形单元的两个中间铰点中,一个中间铰点与连接壳体固定,另一个中间铰点与滑动臂固定,通过连接壳体与滑动臂产生相对滑动,改变底端的菱形单元的两个中间铰点的距离,并将形变依次传递至相邻的菱形单元,从而进行伸缩;所述滑动臂上部与助力臂内腔滑动连接,助力臂远离滑动臂的一端设置与大腿配合的弧形推板。
32.基于上述技术方案,需要说明的是,菱形折叠伸缩支架13由若干个菱形单元组成,相邻两个菱形单元之间的邻边为两根支杆形成的x型结构,其中间的交叉点为中间铰点,若干个菱形单元中所有的连接点都是铰点,每个菱形单元具有两个侧铰点和两个中间铰点,相邻两个菱形单元中共用一个中间铰点,改变相邻两个中间铰点之间的距离,可以改变菱形折叠伸缩支架的伸缩长度。菱形折叠伸缩支架伸缩带动助力臂上下移动,助力臂以滑动臂作为导向沿竖直方向进行移动。菱形折叠伸缩支架起到上升倍增的作用,通过踏板短距离的下移,实现助力臂的倍数上升,达到良好的助力效果。菱形折叠伸缩支架安装在上推组件的侧表面,不影响上推组件的上下滑动,如图4。同时,侧挂式的菱形折叠伸缩支架可以方便拆卸,调整菱形单元的数量,改变菱形折叠伸缩支架上升的倍增值,满足不同高度的上升需求。
33.进一步的,所述踏板后端转动连接上下转动块状体。上下转动块状体用于固定底板和踏板之间的角度。
34.实施例2
参见附图1和2,穿戴式自重力为动力的上行助推器,包括底板1、踏板2、传动组件和上推组件;底板和踏板之间通过弹性元件连接,所述传动组件包括主动齿轮7、从动齿轮8、转换齿轮9、第一齿条5和第二齿条6;所述主动齿轮、从动齿轮和转换齿轮均设置在连接壳体10上,上推组件滑动连接在连接壳体内,所述连接壳体固定在踏板上,第一齿条5固定在底板1上并与主动齿轮7啮合连接,主动齿轮7与转换齿轮9啮合连接,转换齿轮9与从动齿轮8啮合连接,从动齿轮8与第二齿条6啮合连接并与上推组件固定连接;主动齿轮7与从动齿轮8同向旋转,第一齿条5的齿槽和第二齿条6的齿槽同向设置。所述踏板通过弹性元件压缩向底板靠近时,第一齿条保持不动,主动齿轮沿第一齿条向下移动并旋转,从而带动转换齿轮和从动齿轮旋转,与从动齿轮啮合的第二齿条向上移动,从而带动上推组件向上移动。给正在施力的大腿(膝盖上方处)向上的推力,减小使用者上行负担,满足助推需要。需要说明的是第二齿条下部处于悬空位置,仅仅依靠从动齿轮的啮合为动力进行移动。
35.进一步地,所述第一齿条和第二齿条位于底板1的中心位置前后设置。避免下踏时重心偏移,造成第一齿条、第二齿条和转换机构之间的啮合动作卡死或脱齿。为兼顾齿条的强度和成本,第一齿条和第二齿条的齿槽部分采用碳纤维材料,齿槽外的套管硬塑料压模成型。
36.进一步地,所述弹性元件为弹簧组3,踏板前端与底板设置为一个整体,后端分叉成v型并通过弹簧组连接。每次下踏动做完成后,通过弹簧组将踏板后端复位。
37.进一步地,所述连接壳体10上设置第一限位滑轮和第二限位滑轮,第一限位滑轮限制第一齿条与主动齿轮保持啮合,第一限位滑轮设置在第一齿条远离主动齿轮的一侧;第二限位滑轮限制第二齿条与从动齿轮保持啮合,第二限位滑轮设置在第二齿条远离从动齿轮的一侧,第二限位滑轮与从动齿轮从两侧夹持齿条,起到稳定齿条作用的同时,也可以在从动齿轮带动第二齿条的同时向上助推。
38.优选的,可以用限位轴承代替限位滑轮。
39.进一步地,所述上推组件包括滑动臂11和助力臂12,所述滑动臂与连接壳体内腔滑动连接,滑动臂远离连接壳体的一端与助力臂内腔连接。滑动臂和助力臂内部空心设置。便于减轻整套装置的重量。所述连接壳体与小腿配合绑紧;连接壳体下部与护盖可拆卸连接,传动组件设置在护盖内,起到保护作用;连接壳体上部设置与滑动臂配合滑动的空腔,第二齿条贯穿连接壳体延伸至空腔内并与滑动臂连接;滑动臂靠近第二齿条的一端的滑动面设置为锥形滑动面。
40.进一步地,滑动臂与助力臂可以采用固定连接或滑动连接。采用固定连接方式时,助力臂上升距离与踏板下移距离相同,可以通过不同高度的连接螺栓孔来调整滑动臂与助力臂的相对位置,控制整个上升组件起升到位的极限位置,适用于不同高度的人群。采用滑动连接方式时,为了达到使助力臂上升高度达到倍增的效果,可以加装辅助件,所述上推组件安装有菱形折叠伸缩支架,菱形折叠伸缩支架顶端的菱形单元的中间铰点与助力臂固定,菱形折叠伸缩支架底端的菱形单元的两个中间铰点中,一个中间铰点与连接壳体固定,另一个中间铰点与滑动臂固定,通过连接壳体与滑动臂产生相对滑动,改变底端的菱形单元的两个中间铰点的距离,并将形变依次传递至相邻的菱形单元,从而进行伸缩;所述滑动臂上部与助力臂内腔滑动连接,助力臂远离滑动臂的一端设置与大腿配合的弧形推板。
41.基于上述技术方案,需要说明的是,菱形折叠伸缩支架13由若干个菱形单元组成,
相邻两个菱形单元之间的邻边为两根支杆形成的x型结构,其中间的交叉点为中间铰点,若干个菱形单元中所有的连接点都是铰点,每个菱形单元具有两个侧铰点和两个中间铰点,相邻两个菱形单元中共用一个中间铰点,改变相邻两个中间铰点之间的距离,可以改变菱形折叠伸缩支架的伸缩长度。菱形折叠伸缩支架伸缩带动助力臂上下移动,助力臂以滑动臂作为导向沿竖直方向进行移动。菱形折叠伸缩支架起到上升倍增的作用,通过踏板短距离的下移,实现助力臂的倍数上升,达到良好的助力效果。菱形折叠伸缩支架安装在上推组件的侧表面,不影响上推组件的上下滑动,如图4。同时,侧挂式的菱形折叠伸缩支架可以方便拆卸,调整菱形单元的数量,改变菱形折叠伸缩支架上升的倍增值,满足不同高度的上升需求。
42.进一步的,所述踏板后端转动连接上下转动块状体。上下转动块状体用于固定底板和踏板之间的角度。
43.实施例3参见附图1和3,穿戴式自重力为动力的上行助推器,包括底板1、踏板2、传动组件和上推组件;底板和踏板之间通过弹性元件连接,所述传动组件包括主动齿轮7、从动齿轮8、转换齿轮9、第一齿条5和第二齿条6;所述主动齿轮、从动齿轮和转换齿轮均设置在连接壳体10上,上推组件滑动连接在连接壳体内,所述连接壳体固定在踏板2上,第一齿条5固定在底板1上并与主动齿轮7啮合连接,主动齿轮7与转换齿轮9同轴设置,转换齿轮9与从动齿轮8啮合连接,从动齿轮7与第二齿条6啮合连接,第二齿条6与上推组件固定连接;主动齿轮7与从动齿轮8反向旋转,第一齿条5的齿槽和第二齿条6的齿槽同向设置,主动齿轮7的齿数大于转换齿轮9的齿数,即主动齿轮转一圈,从动齿轮转动小于一圈。所述踏板通过弹性元件压缩向底板靠近时,第一齿条保持不动,主动齿轮沿第一齿条向下移动并旋转,转换齿轮与主动齿轮同步同向旋转,从而带动从动齿轮沿主动齿轮的反向旋转,与从动齿轮啮合的第二齿条向下移动。由于主动齿轮的齿数大于转换齿轮的齿数,所以第二齿条下移的距离小于踏板下移的距离,即第二齿条相对于踏板向上移动,第二齿条与上推组件固定连接,相当于上推组件相对于踏板向上移动,由于踏板位置相当于人脚部位置,踏板到连接壳体的长度不变,连接壳体相对于小腿的位置不变,上推组件相对于连接壳体向上滑动,给正在施力的大腿(膝盖上方处)向上的推力,减小使用者上行负担,满足助推需要。需要说明的是第二齿条下部处于悬空位置,仅仅依靠从动齿轮的啮合为动力进行移动。此技术方案实现上推组件的微小移动,移动距离短,不会过度冲击大腿,舒适性高。
44.进一步地,所述第一齿条和第二齿条位于底板1的中心位置前后设置。避免下踏时重心偏移,造成第一齿条、第二齿条和转换机构之间的啮合动作卡死或脱齿。为兼顾齿条的强度和成本,第一齿条和第二齿条的齿槽部分采用碳纤维材料,齿槽外的套管硬塑料压模成型。
45.进一步地,所述弹性元件为弹簧组3,踏板前端与底板设置为一个整体,后端分叉成v型并通过弹簧组连接。每次下踏动做完成后,通过弹簧组将踏板后端复位。
46.进一步地,所述连接壳体10上设置第一限位滑轮和第二限位滑轮,第一限位滑轮限制第一齿条与主动齿轮保持啮合,第一限位滑轮设置在第一齿条远离主动齿轮的一侧;第二限位滑轮限制第二齿条与从动齿轮保持啮合,第二限位滑轮设置在第二齿条远离从动齿轮的一侧,第二限位滑轮与从动齿轮从两侧夹持齿条,起到稳定齿条作用的同时,也可以
在从动齿轮带动第二齿条的同时向上助推。
47.优选的,可以用限位轴承代替限位滑轮。
48.进一步地,所述上推组件包括滑动臂11和助力臂12,所述滑动臂与连接壳体内腔滑动连接,滑动臂远离连接壳体的一端与助力臂可拆卸连接。滑动臂和助力臂内部空心设置。便于减轻整套装置的重量。所述连接壳体与小腿配合绑紧;连接壳体下部与护盖4可拆卸连接,传动组件设置在护盖内,起到保护作用;连接壳体上部设置与滑动臂配合滑动的空腔,第二齿条贯穿连接壳体延伸至空腔内并与滑动臂连接;滑动臂靠近第二齿条的一端的滑动面设置为锥形滑动面。
49.进一步地,所述滑动臂远离连接壳体的一端设置若干高度不同的螺栓孔,助力臂连接滑动臂的一端相对应的设置若干高度不同的螺栓孔,通过连接螺栓的螺栓孔的位置控制上推组件的长度,助力臂远离滑动臂的一端设置与大腿配合的弧形推板。
50.进一步的,所述踏板后端转动连接上下转动块状体。上下转动块状体用于固定底板和踏板之间的角度。
51.实施例4参见附图3、5和6,穿戴式自重力为动力的上行助推器,包括底板1、踏板2、传动组件和上推组件;底板1和踏板2之间通过弹性元件连接,所述传动组件包括主动齿轮7、从动齿轮8、转换齿轮9、第一齿条5和第二齿条6;所述主动齿轮7、从动齿轮8和转换齿轮9均设置在连接壳体10上,上推组件滑动连接在连接壳体内,所述连接壳体固定在踏板2上,第一齿条5固定在底板上并与主动齿轮7啮合连接,主动齿轮7与转换齿轮9同轴设置,转换齿轮9与从动齿轮8啮合连接,从动齿轮8与第二齿条6啮合连接,第二齿条6与上推组件连接;主动齿轮7与从动齿轮8反向旋转,第一齿条5的齿槽和第二齿条6的齿槽同向设置,主动齿轮的齿数大于转换齿轮的齿数,即主动齿轮转一圈,从动齿轮转动小于一圈。。所述踏板通过弹性元件压缩向底板靠近时,第一齿条保持不动,主动齿轮沿第一齿条向下移动并旋转,转换齿轮与主动齿轮同步同向旋转,从而带动从动齿轮沿主动齿轮的反向旋转,与从动齿轮啮合的第二齿条向下移动。所述上推组件包括滑动臂11和助力臂12,所述滑动臂与连接壳体内腔滑动连接。连接壳体上部设置与滑动臂配合滑动的空腔,第二齿条贯穿滑动臂并连接菱形折叠伸缩支架的端部中间铰点;菱形折叠伸缩支架的另一端中间铰点与助力臂相连接,如图5和6。第二齿条外部设置有挡块14,挡块与形成端部中间铰点的两根端部支杆相接触,第二齿条向下移动时,挡块阻挡两根端部支杆向下运动并迫使其改变角度。使菱形折叠伸缩支架沿纵向伸长,带动助力臂向上移动,给正在施力的大腿(膝盖上方处)向上的推力,减小使用者上行负担,满足助推需要。需要说明的是第二齿条下部处于悬空位置,仅仅依靠从动齿轮的啮合为动力进行移动。
52.需要说明的是,此技术方案能够在第二齿条的微小位移的基础上,通过菱形折叠伸缩支架实现上推组件上推距离的倍增,助推力大,能够在最大程度上减小使用者上行负担。
53.进一步地,所述连接壳体10与小腿配合绑紧;连接壳体下部与护盖4可拆卸连接,传动组件设置在护盖内,起到保护作用。所述滑动臂靠近第二齿条的一端的滑动面设置为锥形滑动面。助力臂远离滑动臂的一端设置与大腿配合的弧形推板。
54.进一步地,所述滑动臂和助力臂内部空心设置。便于减轻整套装置的重量。
55.进一步地,所述第一齿条和第二齿条位于底板1的中心位置前后设置。避免下踏时重心偏移,造成第一齿条、第二齿条和转换机构之间的啮合动作卡死或脱齿。为兼顾齿条的强度和成本,第一齿条和第二齿条的齿槽部分采用碳纤维材料,齿槽外的套管硬塑料压模成型。
56.进一步地,所述弹性元件为弹簧组3,踏板前端与底板设置为一个整体,后端分叉成v型并通过弹簧组连接。每次下踏动做完成后,通过弹簧组将踏板后端复位。
57.进一步地,所述连接壳体10上设置第一限位滑轮和第二限位滑轮,第一限位滑轮限制第一齿条与主动齿轮保持啮合,第一限位滑轮设置在第一齿条远离主动齿轮的一侧;第二限位滑轮限制第二齿条与从动齿轮保持啮合,第二限位滑轮设置在第二齿条远离从动齿轮的一侧,第二限位滑轮与从动齿轮从两侧夹持齿条,起到稳定齿条作用的同时,也可以在从动齿轮带动第二齿条的同时向上助推。
58.优选的,可以用限位轴承代替限位滑轮。
59.进一步的,所述踏板后端转动连接上下转动块状体。上下转动块状体用于固定底板和踏板之间的角度。
60.以上列举的仅是本发明的几个最佳实施例。显然,本发明不限于以上实施例,还可以有许多变形。本领域的普通技术人员能从本发明公开的内容直接导出或联想到的所有变形,均应认为是本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

