1.本发明涉及一种多孔砖生产设备,特别涉及一种用于多孔砖装配的前端上料机械手及其工作方法。
背景技术:
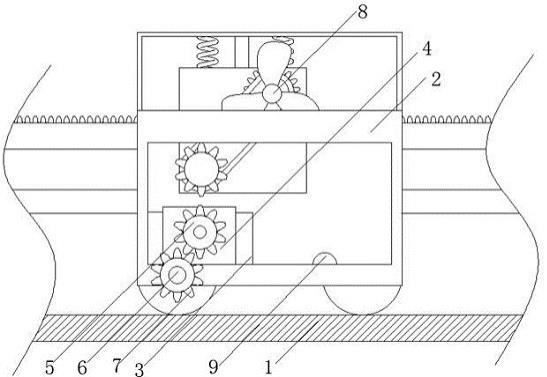
2.现有的墙体砌筑后通过在外墙或内墙设置保温层,以达到隔热保温功能,但是这样设置的保温层,特别是设置在外墙的保温层长期风吹日晒后极易从墙面脱落,造成高空坠物,十分危险,同时脱落后影响墙体整体的保温性能和防水性。针对上述问题,我司研发了一种带保温板的多孔砖9,参阅图1,其包括多孔砖,该多孔砖9具有一个尺寸较大的主孔901,主孔贯穿多孔砖,该主孔为矩形,其长度方向平行于多孔砖的长度方向,砌墙或在做砌体时,多孔砖上的孔为上下朝向,主孔的长度方向平行于墙面,在该主孔内嵌有保温板91,该保温板由保温材料制成,其整体为长方体,与主孔的形状相同;同时在多孔砖上还设有多个尺寸较小的小孔902,一方面能减轻整体重量,另一方面也具有一定的保温隔音功能,该产品有效解决了上述问题,提高了墙体的保温效果,避免传统的外墙保温层脱落,提高了墙面安全性,且降低了保温层的施工成本,其整体效果好,适于推广。
3.目前,该产品通过人工方式进行组装,即通过人工的方式将保温板安装至多孔砖内,效率低且成本高,因此,急需一种能实现多孔砖自动组装的装置,以提高装配效率并降低生产成本,提高产量。而传统的多轴机器人或机械手结构复杂,成本高,需要专业人员进行调试,且维护不便。
技术实现要素:
4.【1】要解决的技术问题
5.本发明要解决的技术问题是提供一种结构简单紧凑、能对多孔砖进行定向放置的用于多孔砖装配的前端上料机械手。
6.【2】解决问题的技术方案
7.本发明提供一种用于多孔砖装配的前端上料机械手,安装在进料输送线与出料输送线之间的机架上,其包括:
8.安装支架2,作为安装载体用于安装其它部件;
9.移料机构5,转动地安装在所述安装支架2上,所述移料机构5的主轴53能实现径向转动及轴向移动,且所述主轴的端部延伸至所述安装支架2外;
10.机械手本体4,安装在所述输出轴53的端部,所述机械手本体4的重心位于所述主轴53的轴线上,所述机械手4上设有四个以正方形形式排列的弹性卡爪,所述弹性卡爪的侧壁设有气囊7;
11.当机械手本体为垂直状态时为取料工位,当机械手本体为水平状态时为放料工位。
12.进一步的,当处于取料工位且弹性卡爪49位于多孔砖的主孔的正上方时,所述弹
性卡爪49能随所述移料机构下移并插入所述多孔砖的主孔内,且该弹性卡爪的气囊与气源连通并卡紧所述主孔内壁;当处于取料工位且弹性卡爪49位于多孔砖的主孔的斜上方时,所述弹性卡爪随所述移动机构的下移产生弹性压缩,且该弹性卡爪的气囊与气源不连通。
13.进一步的,所述移料机构包括转动支架61、套管51、主轴53、滑块64、推动机构、从动摩擦轮531及主动摩擦轮22,所述转动支架61通过转轴511转动地安装在所述安装支架2上,所述转轴511水平设置且与一驱动机构连接,所述套管51固定在所述转动支架61上,所述主轴53套设在所述套管51内、并能实现径向转动和轴向滑动,所述主轴53的轴线垂直于所述转动支架的转动轴线;所述主轴53的两端均延伸至所述套管外,所述滑块64与所述主轴53同轴、且滑配在所述转动支架61上,所述滑块的滑动方向平行于所述主53的轴线,所述滑块64与所述主轴53的尾部端面接触,所述推动机构的输出端与所述滑块64连接并用于推动其轴向滑移,所述从动摩擦轮固定在所述主轴的尾部,所述主动摩擦轮22与一驱动电机23连接,当主轴53转动至水平状态时所述主动摩擦轮22与所述从动摩擦轮531接触,并能驱动从动摩擦轮实现90度转动。
14.进一步的,所述主轴53的侧壁设有环形凸台532,所述环形凸台532位于所述套管51内,所述环形凸台532与所述套管51之间设有第一弹性部件,所述第一弹性部件推动所述主轴向后运动并使其端部贴合于所述滑块64,所述主轴53的端部与所述滑块的接触面之间设有止推轴承。
15.进一步的,所述主轴的侧壁周向均布有两个或四个第一磁体532a,所述套管51的内壁周向均布有与所述第一磁体532a极性相反的第二磁体51a,当所述第一磁体532a与所述第二磁体51a相互对应时,相邻两弹性卡爪之间的连线垂直或平行于进料输送线的输送方向。
16.进一步的,所述机械手本体4包括用于与所述移料机构连接的支架板41及以正方形形式固定在所述支架板41下端的四个弹性卡爪,所述弹性卡爪包括固定在所述支架板41下端的阀座42、固定在所述阀座42下端的卡爪支架、及滑配在所述卡爪支架下端的卡爪本体49,所述卡爪本体49的滑动方向平行于所述主轴的轴线,所述卡爪本体49的顶部设置至少3根导杆46,所述卡爪支架上设有容所述导杆46插入以实现滑配的第一滑套45、及使所述卡爪本体有向下的运动趋势的第二弹性部件;所述卡爪本体49的顶部垂直设置有刚性气管47,所述刚性气管47的顶部封口并在其侧壁开设有进气孔471,所述刚性气管通过管路与设置在所述卡爪本体侧壁的气囊连通;所述阀座内设有容所述刚性气管47插入并实现滑配的阀孔,所述阀孔的侧壁开设有通过换向阀与气源连接的出气孔420a,当所述卡爪本体位于下极限位时,所述进气孔471与所述出气孔420a连通,当所述卡爪本体受压上移时,所述出气孔420a与所述刚性气管47侧壁贴合并阻断气源与气囊的连通。
17.进一步的,所述卡爪本体49包括横截面为正方形的卡爪体,所述卡爪体的四个侧壁开设有深度相同的气囊槽492,所述气囊安装在所述气囊槽492内;所述气囊包括通过粘结剂固定在所述气囊槽492底面的气囊本体71,所述气囊本体与所述气囊槽底面之间形成密封腔,所述气囊本体的内表面贴合有橡胶支撑片72,所述橡胶支撑片72与所述气囊槽的底面之间设有使所述气囊本体向气囊槽靠近以排出密封腔内气体的第三弹性部件;所述卡爪体的顶面中心开设有用于与钢球气管连接的主气体流道490,所述气囊槽的底面开设有连通所述主气体流道的副气体流道491。
18.进一步的,当密封腔内无气压时,所述第三弹性部件拉动所述气囊本体并使其位于所述气囊槽内,且气囊本体侧壁与卡爪体表面之间的距离大于或等于1mm且小于或等于5mm;当密封腔内充压力时,所述气囊本体的侧壁位于气囊槽外、且气囊侧壁与卡爪体表面之间的距离大于或等于5mm且小于或等于20mm;且充气后,相邻两卡爪上的气囊不接触。
19.进一步的,所述安装支架上设有辅助摩擦片21,所述辅助摩擦片21位于所述转动支架的转动路径上并能与所述主轴53上的从动摩擦轮接触,所述辅助摩擦片21的有效长度为所述从动摩擦轮的周长的1/180
‑
1/72,以在接触时使主轴53产生2
°‑5°
的转动,所述辅助摩擦片21与位于取料工位的主轴53之间的夹角大于等于10度且小于等于20度。
20.同时,本发明还提供一种用于多孔砖装配的前端上料机械手的上料方法,其包括以下步骤:
21.s1、初始复位:
22.转动支架转动至取料工位,以使主轴处于垂直状态,并使机械手本体位于进料输送线末端的多孔砖的正上方;
23.同时推动机构推动滑块并使其运动至上极限位,以使主轴和机械手本体在弹力作用下移动至上极限位;
24.且在磁力的作用下,使第一磁体和第二磁体相互对应,以使机械手本体上的相邻两个弹性卡爪之间的连线垂直或平行于多孔砖的主孔的长度方向,参阅图9;
25.s2、推动机构(气缸)推动滑块向下滑动并运动至下极限位,在此过程中:
26.位于多孔砖的主孔正上方的两个弹性卡爪插入多孔砖的主孔内,弹性卡爪上的卡爪体的侧壁与多孔砖的主孔的内壁基本平行,且该弹性卡爪上的刚性气管上的进气孔471与阀座42上的出气孔420a连通;
27.位于多孔砖的主孔斜上方的两个弹性卡爪底部与多孔砖表面接触,并在压力作用下使该弹性卡爪上的卡爪本体上移,使该弹性卡爪上的刚性气管的进气孔与阀座上的出气孔错位并阻断与气源的连通;
28.s3、通过换向阀使气源的压缩气体进入阀座内,位于主孔内的弹性卡爪上的气囊充气并使气囊侧壁卡紧主孔的内壁;而位于主孔外的气囊由于其与出气孔不连通,因此其不充气;
29.s4、推动机构(气缸)推动滑块向上滑动并运动至上极限位,气囊鼓起并与主孔内壁接触,在摩擦力作用下,机械手本体提起多孔砖上移并使其脱离进料输送线;
30.s5、驱动机构(电机)驱动转动支架顺时针转动90度(以图4为例),在转动过程中,主轴53上的从动摩擦轮与辅助摩擦片21接触并使主轴产生2
°‑5°
的转动,使机械手本体的整体重心产生偏移,避免多孔砖的重心位于主轴或机械手的轴线的正上方,即避免多孔砖的重心位于主轴的轴线所在的垂面上而影响其自转,该动作针对于多孔砖的主孔在下端;
31.在后续转动中,主轴在多孔砖的重心及磁力的作用力下转动,最终使多孔砖的重心位于主轴的正下方;
32.s6、转动支架转动至放料工位时,主轴53处于水平状态、且主轴上的从动摩擦轮与安装支架上的主动摩擦轮接触,主动摩擦轮驱动从动摩擦轮转动90度并使机械手本体上的多孔砖处于垂直状态;
33.s7、推动机构推动滑块向下移动并运动至下极限位,使多孔砖位于出料输送线上,
通过换向阀阻断气源与阀座的连接,并使阀座处于泄压状态;
34.位于多孔砖主孔内的气囊失压并与主孔内壁脱离,且在第三弹性部件的拉力作用下将气囊拉入至气囊槽内;
35.位于主孔内的卡爪本体与主孔内壁脱离时,位于主孔外的卡爪本体在弹力作用下推动多孔砖向外运动;
36.同时,推动机构推动滑块向上移动并运动至上极限位,使机械手本体与多孔砖脱离;
37.s8、驱动机构驱动转动支架转动并使主轴处于垂直状态,在转动支架转动过程中,主轴上的从动摩擦盘与辅助摩擦片接触并使主轴产生转动,并在磁力的作用下实现主轴及机械手本体的径向定位。
38.【3】有益效果
39.本发明用于多孔砖装配的前端上料机械手,能对进料输送线上进入的朝向不同的多孔砖进行自适应抓取,并在多孔砖自身的重力下使机械手产生转动并使多孔砖孔体位于上端,在通过机械手90度旋转后将多孔砖以垂直状态送入至出料输送线,以进行下一步的保温板装配工序;卡爪体以矩形的方式设置,且采用弹性伸缩式结构,能插入以正向放置或反向放置的多孔砖的主孔内,自适应能力好,且该结构方便在生产时的重心控制,以使机械手本体重心位于主轴轴线上;推动机构连杆偏置设置,减小了气缸的行程,降低了其安装空间和整体重量,同时增大了滑块的运动行程,响应快;通过同步带轮驱动转动支架转动,运行可靠且精度高;设置辅助摩擦片,使主轴产生一定角度的偏转,避免由于多孔砖重心位于主轴正左(水平时为正上方)而影响其自动调准,提高了整体的运行稳定性和可靠性;在主轴侧壁配设周向均布的磁体,使主轴自动转动复位,进一步提高其运行的可靠性,避免在主轴水平转垂直时受震动或其它因素的影响而产生微量偏转,确保卡爪体复位的精确度,避免空行程的产生;卡爪侧壁采用气囊结构,能快速充气鼓起以卡紧主孔内壁,实现抓取,结构紧凑,抓取效果好;采用隐藏式气囊,避免在插入时候气囊与主孔内壁摩擦,保护了气囊,避免长期摩擦造成磨损,延长了其使用寿命;通过设置弹性部件,辅助气囊内气体释放,提高泄压效率,利于气囊快速脱离主孔内壁,并将其拉入至气囊槽内,提高了工作效率并进一步保护了气囊;刚性气管随卡爪体同步运动,在伸缩时实现自动的连通或阻断,避免位于外侧的气囊充气,避免浪费,同时提高了位于主孔内的气囊的充气效率,进而提高了整体的工作效率;本发明用于多孔砖装配的前端上料机械手,结构紧凑,制造成本低,运行可靠稳定,且搬运效果好。
附图说明
40.图1为应用于本发明的多孔砖的结构示意图;
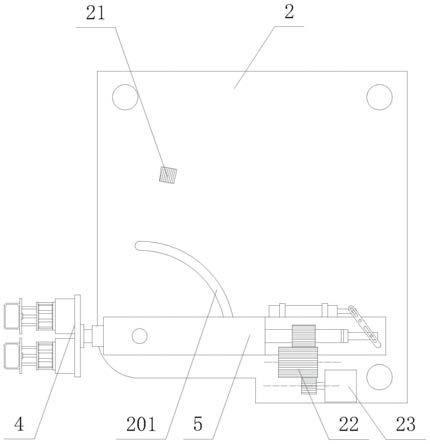
41.图2为应用于本发明的进料输送线的结构示意图;
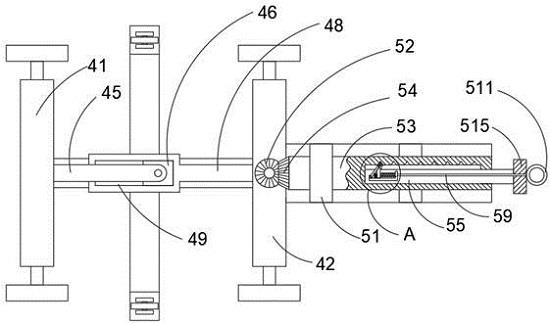
42.图3为本发明用于多孔砖装配的前端上料机械手的结构示意图;
43.图4为本发明用于多孔砖装配的前端上料机械手的移料机构的安装示意图;
44.图5为本发明用于多孔砖装配的前端上料机械手的移料机构的结构示意图;
45.图6为本发明用于多孔砖装配的前端上料机械手的移料机构的剖视图;
46.图7为本发明用于多孔砖装配的前端上料机械手的机械手本体的结构示意图;
47.图8为本发明用于多孔砖装配的前端上料机械手的弹性卡爪的安装分布示意图;
48.图9为本发明用于多孔砖装配的前端上料机械手的抓取多孔砖的状态示意图;
49.图10为本发明用于多孔砖装配的前端上料机械手的弹性卡爪的剖视图;
50.图11为本发明用于多孔砖装配的前端上料机械手的卡爪支架的结构示意图;
51.图12为图10中a部放大图;
52.图13为本发明用于多孔砖装配的前端上料机械手的刚性气管的阻断状态的示意图;
53.图14为本发明用于多孔砖装配的前端上料机械手的主轴磁体的安装示意图;
54.图15为本发明用于多孔砖装配的前端上料机械手的卡爪体的剖视图;
55.图16为本发明用于多孔砖装配的前端上料机械手的卡爪的结构示意图;
56.图17为图15中b部放大图;
57.图18为本发明用于多孔砖装配的前端上料机械手的气囊涨紧状态的示意图。
具体实施方式
58.下面结合附图,详细介绍本发明实施例。
59.我司研发了一种带保温板的多孔砖,参阅图1,其包括多孔砖,该多孔砖9具有一个尺寸较大的主孔91,主孔贯穿多孔砖,主孔为矩形,其长度方向平行于多孔砖的长度方向,砌墙或在做砌体时,多孔砖上的孔为上下朝向,主孔的长度方向平行于墙面,在该主孔内嵌有保温板,该保温板由保温材料制成,其整体为长方体,与主孔的形状相同;同时在多孔砖上还设有多个尺寸较小的小孔,一方面能减轻整体重量,另一方面也具有一定的保温隔音功能。
60.为了能实现多孔砖中的保温板的自动装配,本发明提供一种用于保温多孔砖中保温板组装的装配系统,用于将保温板插入至多孔砖9的主孔91内,而本技术是用于将输送线上的水平输入的多孔砖(孔体上下朝向)经调整后,实现定向的垂直状态,以便于后期装配。
61.进料输送线1用于将进入的多孔砖进行方向调准,其结构参阅图2,具体的,是将横向(多孔砖的长度方向垂直于输送线的输送方向)进入的多孔砖经挡板调整后以轴向(多孔砖的长度方向平行于输送线的输送方向)形式排列,具体的,该进料输送线1包括有输送线本体,在输送线本体的右侧设有第一挡板11,第一挡板11的长度方向平行于其输送方向,该第一挡板的左侧形成第一有效输送区,在输送线本体的前端(出料方向)设有平行于其输送方向的第二挡板12,第二挡板12的左侧形成宽度小于第一有效输送区的第二有效输送区,在第二有效输送区的前端的左侧设有第三挡板13,第三挡板13将第二有效输送区隔成第三有效输送区,第三有效输送区的宽度与多孔砖的宽度相同,多孔砖能在第三有效输送区内轴向(多孔砖长度方向平行于输送方向),在第三有效输送区的端部设有端板14,用于多孔砖在输送线上的端部定位,在该端板上设有一接触开关,其朝向多孔砖进入端,位于端部的多孔砖能触发该接触开关。
62.参阅图3至图18,本发明提供一种用于多孔砖装配的前端上料机械手,用于多孔砖的定向放置,具体的,是将进料输送线上的水平放置(孔体上下朝向,且多孔砖的长度方向平行于输送线的输送方向)的多孔砖经过机械手调整后为垂直状态,并使孔体的轴线垂直于出料输送线的输送方向,且使多孔砖的主孔位于输送方向的后端。
63.该前端上料机械手安装在进料输送线的出口端与出料输送线的进口端之间,其包括有安装支架2、移料机构5和机械手本体4,安装支架2作为安装载体用于安装其它部件,移料机构5转动地安装在安装支架2上,该移料机构的转动轴线为水平设置,在移料机构5上设有一主轴53,该主轴53能实现径向转动及轴向移动,且主轴53的轴线垂直于移料机构的转动轴线,主轴的端部延伸至所述安装支架2外;机械手本体4安装在输出轴53的端部,且机械手本体4的重心位于主轴53的轴线上,在机械手4上设有四个以正方形形式(两两之间的距离相同,其中心的连线构成一个正方形)排列的弹性卡爪,在弹性卡爪的侧壁设有气囊7;当机械手本体(或主轴)为垂直状态时为取料工位,当机械手本体(或主轴)为水平状态时为放料工位,本发明通过多孔砖的重心来使主轴、机械手实现自动的角度转动,再经过定量90度的转动来实现多孔砖的定向出料。
64.当处于取料工位(主轴为垂直状态时)且弹性卡爪49位于多孔砖的主孔的正上方时,弹性卡爪49能随移料机构下移并插入多孔砖的主孔内,且该弹性卡爪的气囊与气源连通并卡紧主孔内壁;当处于取料工位且弹性卡爪49位于多孔砖的主孔的斜上方时,弹性卡爪随移动机构的下移产生弹性压缩,且该弹性卡爪的气囊与气源不连通。
65.以下对各个机构的结构进行详细说明:
66.参阅图3
‑
图6,移料机构包括转动支架61、套管51、主轴53、滑块64、推动机构、从动摩擦轮531及主动摩擦轮22,为了便于描述,以主轴的垂直状态进行说明;转动支架61通过转轴511转动地安装在安装支架2上,该转轴511水平设置,其轴线平行于进料输送线的输送方向,在该转轴511的端部固定有一个驱动轮3,该驱动轮位于齿轮或同步带轮,且其通过链条或同步带与一驱动机构(电机)连接,通过驱动机构带动转轴实现转动,进而带动转动支架转动;套管51固定在转动支架61上,在该套管的两端贯穿有套孔510,套孔510的轴线垂直于转动支架的转动轴线,套管套设在该套孔内,并能实现径向转动及轴向滑动,主轴53的两端均延伸至套管外,具体的,在主轴的侧壁设有环形凸起并形成环形凸台532,该环形凸台位于套管51内,该环形凸台532将主轴53分割成上轴体和下轴体,上轴体向上、下轴体向下延伸至套管51外,在套管的两端均设有滑动轴承51a,与主轴连接,用于实现其径向转动及轴向移动,该滑动轴承包括圆筒形的轴承本体,该轴承本体的内壁与主轴的外壁贴合,主轴可以在该轴承本体内径向转动及轴向移动,在该轴承本体的内壁开设有孔体或槽体,在孔体或槽体内填充有石墨,轴承本体的端部径向向外折弯90度并形成连接部,用于与套管51连接;在套管51内设有第一弹性部件,该第一弹性部件套设在下轴体上,本实施例中的第一弹性部件为弹簧,且其上端与环形凸台的下底面接触,当主轴向下运动时,该第一弹性部件具有使主轴向上的运动趋势;滑块64滑配在转动支架上,其位于主轴的上端,且与主轴同轴,同时,滑块64的滑动方向平行于主轴的轴线,滑块64下底面与主轴53的尾部(上轴体尾部)端面接触,为了降低滑块与主轴之间的摩擦,在滑块与上轴体的端面之间设有止推轴承,该止推轴承能承受轴向推力,同时允许主轴实现径向转动;推动机构的输出端与滑块64连接并用于推动其轴向滑移,具体的,该推动机构包括气缸62和连杆63,气缸62固定在转动支架62上,其轴线平行于主轴的轴线,连杆转动的铰接在转动支架上,且连杆的铰点至其头部的距离小于至尾部的距离,例如,连杆的铰点至连杆头部的距离为l1,连杆的铰点至连杆尾部的距离为l2,且l1<l2,两者的比例为1/3
‑
1/2,在连杆的头部和尾部均设有条形导槽,条形导槽的长度方向平行于连杆的长度,气缸的输出轴上设有第一销轴,该第一销轴套设
在连杆头部的条形导槽内,滑块上设有第二销轴,该第二销轴套设在连杆尾部的条形导槽内,通过气缸的伸缩来实现滑块的上下动作,且气缸的行程小于滑动的行程,通过小行程控制大行程,响应快;从动摩擦轮固定在主轴的尾部,及固定在上轴体上,主动摩擦轮22与一驱动电机23连接,当主轴53转动至水平状态时,主动摩擦轮22与从动摩擦轮531接触,主动摩擦轮能驱动从动摩擦轮实现90度转动,本实施例中的主动摩擦轮和从动摩擦轮均为直齿轮;为了避免转动过行程,在转动支架的侧壁设有一定位凸起512,该定位凸起的横截面为圆形,且其轴线平行于转动支架的轴线,在安装支架上设有容定位凸起套入以实现定位的弧形槽201,该弧形槽的圆心位于转动支架的转动轴线上。
67.参阅6和图14,为了实现主轴径向自动转动复位,在主轴的侧壁周向均布有两个或四个第一磁体532a,同时在套管51的内壁周向均布有与所述第一磁体532a极性相反的第二磁体51a,当第一磁体532a与第二磁体51a相互对应时,相邻两弹性卡爪之间的连线垂直或平行于进料输送线的输送方向,参阅图8
‑
图9;本实施例中,第一磁体安装在环形凸台的侧壁。
68.参阅图7
‑
图9,机械手本体4包括用于与移料机构的下轴体连接的支架板41及以正方形(阵列)形式固定在支架板41下端的四个弹性卡爪,弹性卡爪包括固定在支架板41下端的阀座42、固定在阀座42下端的卡爪支架、及滑配在卡爪支架下端的卡爪本体49,卡爪本体49的滑动方向平行于主轴的轴线,在卡爪本体49的顶部设置至少3根导杆46,在卡爪支架上设有容导杆46插入以实现滑配的第一滑套45、及使卡爪本体有向下的运动趋势的第二弹性部件;该卡爪支架包括平行设置的上底板431和下底板432,第一滑套垂直固定在上底板与下底板之间,在第一滑套的上下两端均设有第二滑动轴承44,导杆滑配在第二滑动轴承内,在导杆的侧壁设有环形凸起461,该环形凸起位于第一滑套内,同时在第一滑套内设有第二弹性部件,本实施例中的第二弹性部件为弹簧,该弹簧套设在导杆上,其顶部与上端的滑动轴承接触,下端与环形凸起的上端面接触,该第二弹性部件使导杆有向下的运动趋势;同时在卡爪本体49的顶部垂直设置有刚性气管47,为了提高运行的顺畅性,在卡爪支架上设有容刚性气管穿过的第二套管482,刚性气管47的顶部封口,且在刚性气管的上端侧壁开设有进气孔471,该刚性气管47与设置在卡爪本体侧壁的气囊连通。
69.参阅图10、图12
‑
图13,在阀座的下端底面开设有阀孔,该阀孔用于容刚性气管47插入并实现滑配,在阀孔的侧壁开设有通过换向阀与气源连接的出气孔420a,在阀孔上设有密封圈422a,该密封圈至少为两个且设置在出气孔的上下两端,具体的,在阀座内成型有空气流道420,该空气流道一端与进气孔连通,另一端通过换向阀与气源连接;当卡爪本体位于下极限位时,进气孔471与出气孔420a连通,当卡爪本体受压上移时,出气孔420a与刚性气管47侧壁贴合,及进气孔与出气孔错位,进而阻断气源与气囊的连通。
70.参阅图15
‑
图18,卡爪本体49包括横截面为正方形的卡爪体,其宽度小于多孔砖的主孔的高度,两者之间的尺寸差值在10mm
‑
30mm之间,卡爪体的边缘倒角,四个卡爪体的相对面平行,在卡爪体的四个侧壁开设有深度相同的气囊槽492,该气囊槽为圆角矩形,气囊安装在该气囊槽492内;具体的,气囊包括通过粘结剂固定在气囊槽492底面的气囊本体71,在气囊本体与气囊槽底面之间形成密封腔,在气囊本体的内表面贴合有橡胶支撑片72,该橡胶支撑片的厚度为1mm
‑
3mm,在橡胶支撑片上以矩阵的形式开设有若干小孔,在橡胶支撑片72与气囊槽的底面之间设有第三弹性部件73,该第三弹性部件能使气囊本体向气囊槽靠
近以排出密封腔内的气体,具体的,在气囊槽的底面开设有若干螺孔493,在螺孔内配设有螺栓,在螺栓的头部开设有孔,第三弹性部件为弹簧,其端部设有挂钩,一端穿过螺栓头部的孔,另一端与开设在橡胶支撑片内表面的孔连接,该第三弹性部件能拉动气囊本体向内运动,当充气时,气压大于弹簧力,并使气囊本体克服弹簧力并向外鼓起,以与多孔砖的主孔内壁接触;当释放时,气囊内部失压,第三弹性部件拉动气囊本体向内运动,排除多余气体,并将气囊本体拉入至气囊凹槽内;本实施例中,当密封腔内无气压时,第三弹性部件拉动气囊本体并使其位于气囊槽内,且气囊本体外壁与卡爪体表面之间的距离大于或等于1mm且小于或等于5mm;当密封腔内充压力时,气囊本体的侧壁位于气囊槽外、且气囊外壁与卡爪体表面之间的距离h1大于或等于5mm且小于或等于20mm;且充气后,相邻两卡爪上的气囊不接触,避免产生的推力影响导杆;在卡爪体的顶面中心开设有用于与钢球气管连接的主气体流道490,在气囊槽的底面开设有连通主气体流道的副气体流道491。
71.为了避免在搬运时砖体的重心位于主轴(机械手)的正上方而影响自动转动跳转,本实施例中在安装支架上设有辅助摩擦片21,参阅图4,辅助摩擦片21位于转动支架的转动路径上,并能与主轴53上的从动摩擦轮接触,辅助摩擦片21的有效长度(与从动摩擦轮的接触长度)为从动摩擦轮的周长的1/180
‑
1/72,以在接触时使主轴53产生2
°‑5°
的转动,其能使机械手本体的整体重心产生偏转,辅助摩擦片21与位于取料工位的(垂直时)主轴53之间的夹角大于等于10度且小于等于20度。
72.同时,本发明还提供一种用于多孔砖装配的前端上料机械手的上料方法,其包括以下步骤:
73.s1、初始复位:
74.转动支架转动至取料工位,以使主轴处于垂直状态,并使机械手本体位于进料输送线末端的多孔砖的正上方;
75.同时推动机构推动滑块并使其运动至上极限位,以使主轴和机械手本体在弹力作用下移动至上极限位;
76.且在磁力的作用下,使第一磁体和第二磁体相互对应,以使机械手本体上的相邻两个弹性卡爪之间的连线垂直或平行于多孔砖的主孔的长度方向;
77.s2、推动机构推动滑块向下滑动并运动至下极限位,在此过程中:
78.位于多孔砖的主孔正上方的两个弹性卡爪插入多孔砖的主孔内,且该弹性卡爪上的刚性气管上的进气孔471与阀座42上的出气孔420a连通;
79.位于多孔砖的主孔斜上方的两个弹性卡爪底部与多孔砖表面接触,并在压力作用下使该弹性卡爪上的卡爪本体上移,使该弹性卡爪上的刚性气管的进气孔与阀座上的出气孔错位并阻断与气源的连通;
80.s3、通过换向阀使气源的压缩气体进入阀座内,位于主孔内的弹性卡爪上的气囊充气并使气囊侧壁卡紧主孔的内壁;
81.位于主孔外的气囊不充气;
82.s4、推动机构推动滑块向上滑动并运动至上极限位,在摩擦力作用下,机械手本体提取多孔砖上移并使其脱离进料输送线;
83.s5、驱动机构驱动转动支架转动,在转动过程中,主轴上的从动摩擦轮与辅助摩擦片接触并使主轴产生2
°‑5°
的转动,使机械手本体的整体重心产生偏移;
84.在后续转动中,主轴在多孔砖的重心及磁力的作用力下转动,最终使多孔砖的重心位于主轴的正下方;
85.s6、驱动电机驱动转动支架转动90度至放料工位时,主轴53处于水平状态、且主轴53上的从动摩擦轮531与安装支架上的主动摩擦轮22接触,主动摩擦轮在电机23的带动下驱动从动摩擦轮转动90度,并使机械手本体上的多孔砖同步转动90度并处于垂直状态或趋近垂直状态;
86.s7、推动机构(气缸)推动滑块向下移动并运动至下极限位,使多孔砖位于出料输送线上,通过换向阀阻断气源与阀座的连接,并使阀座处于泄压状态;
87.位于多孔砖主孔内的气囊失压并与主孔内壁脱离,且在第三弹性部件的拉力作用下将气囊拉入至气囊槽内;
88.位于主孔内的卡爪本体与主孔内壁脱离时,位于主孔外的卡爪本体在弹力作用下推动多孔砖向外运动,该(位于主孔外)卡爪本体产生一个推力,为了避免该推力将垂直状态的多孔砖,因此,在出料输送线的进口端垂直设置有一个挡料板,当机械手将多孔砖放置于出料输送线时,多孔砖的侧壁(平行于卡爪插入一侧)与该挡料板接触,同时能对位于主孔外的卡爪产生的推力具有支撑作用,避免多孔砖受力倒下,同时该挡料板对多孔砖产生定位效果,以方便下一步骤中保温板的装配;
89.同时,推动机构推动滑块向上(相对于图4中向右)移动并运动至上极限位(相对于图4中右边限位),使机械手本体与多孔砖脱离;
90.s8、驱动机构驱动转动支架转动反向转动90度,并使主轴处于垂直状态,在转动支架转动过程中,主轴上的从动摩擦盘与辅助摩擦片接触并使主轴产生转动,并在磁力的作用下实现主轴及机械手本体的径向定位,以使机械手本体上的卡爪体的连线平行于进料输送线的输送方向
91.本发明用于多孔砖装配的前端上料机械手,能对进料输送线上进入的朝向不同的多孔砖进行自适应抓取,并在多孔砖自身的重力下使机械手产生转动并使多孔砖孔体位于上端,在通过机械手90度旋转后将多孔砖以垂直状态送入至出料输送线,以进行下一步的保温板装配工序;卡爪体以矩形的方式设置,且采用弹性伸缩式结构,能插入以正向放置或反向放置的多孔砖的主孔内,自适应能力好,且该结构方便在生产时的重心控制,以使机械手本体重心位于主轴轴线上;推动机构连杆偏置设置,减小了气缸的行程,降低了其安装空间和整体重量,同时增大了滑块的运动行程,响应快;通过同步带轮驱动转动支架转动,运行可靠且精度高;设置辅助摩擦片,使主轴产生一定角度的偏转,避免由于多孔砖重心位于主轴正左(水平时为正上方)而影响其自动调准,提高了整体的运行稳定性和可靠性;在主轴侧壁配设周向均布的磁体,使主轴自动转动复位,进一步提高其运行的可靠性,避免在主轴水平转垂直时受震动或其它因素的影响而产生微量偏转,确保卡爪体复位的精确度,避免空行程的产生;卡爪侧壁采用气囊结构,能快速充气鼓起以卡紧主孔内壁,实现抓取,结构紧凑,抓取效果好;采用隐藏式气囊,避免在插入时候气囊与主孔内壁摩擦,保护了气囊,避免长期摩擦造成磨损,延长了其使用寿命;通过设置弹性部件,辅助气囊内气体释放,提高泄压效率,利于气囊快速脱离主孔内壁,并将其拉入至气囊槽内,提高了工作效率并进一步保护了气囊;刚性气管随卡爪体同步运动,在伸缩时实现自动的连通或阻断,避免位于外侧的气囊充气,避免浪费,同时提高了位于主孔内的气囊的充气效率,进而提高了整体的工
作效率;本发明用于多孔砖装配的前端上料机械手,结构紧凑,制造成本低,运行可靠稳定,且搬运效果好。
92.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。