1.本发明属于智能加工领域,具体涉及一种基于数学模型的智能加工装置。
背景技术:
2.数学中常见的模型为各种规则或不规则的立体形状,相应的立体几何模型可有效的应用至教学当中,便于同学更充分的理解立体几何以及相应的结题思路。常见的立体几何模型多采用手工方式进行制作,将杆作为立体几何模型的框架式结构,然后在框架式结构外粘贴张紧的贴纸,形成立体几何模型的表面,相应方式形成的立体几何模型不够牢固,同时生产效率低。
3.还有采用木材原料,将木材原料切割和打磨成相应的立体几何模型形状,在将木材原料切割为不同的立体几何模型时,需要采用不同结构的加工装置才能完成立体几何模型不同面的切割和打磨,导致不同的立体几何模型加工成本高,也不利于立体几何模型的批量化生产。
技术实现要素:
4.本发明意在提供一种基于数学模型的智能加工装置,以解决在完成不同立体几何模型的切割加工时,需要更换不同的加工装置才能完成加工,导致不同的立体几何模型加工成本高的问题。
5.为了达到上述目的,本发明的基础方案如下:一种基于数学模型的智能加工装置,包括安装架以及能对木材原料进行固定的固定单元,还包括切削单元,切削单元包括切削刀、能带动切削刀沿安装架的竖直移动的移动部以及能带动切削刀转动的转动部,固定单元包括连接臂以及固定木材原料的固定头,固定头与连接臂球头连接,固定头的端面可与切削刀平行。
6.基础方案的原理及其优点:在对木材原料进行加工时,先将木材原料固定在固定头处,然后移动部带动切削刀竖直移动,转动部带动以切削刀转动,使得切削刀与木材原料的待切削处相对,此时通过连接臂推动固定头带动木材原料同步移动,使得切削刀对木材原料的待切削处进行切削处理;待木材原料的一侧被切削刀切削后,再次通过移动部和转动部调整切削刀与木材原料的相对位置,同时通过转动固定头与连接臂的连接处,调整木材原料的角度和位置,使得木材原料的另一待切削处与切削刀相对,可适应性的针对不同立体几何模型的不同面进行切削成型加工,进而可将不同的立体几何模型切削成型,能够减少不同设备的使用,使得整个智能加工装置的使用适应性强。
7.进一步,移动部包括安装盘、圆形的第一导轨以及在第一滑轨上滑动的第一滑块,安装盘竖直固定安装在安装架上,第一导轨同轴固定安装在安装盘的一侧上,转动部固定安装在第一滑块上。
8.通过上述设置,在对切削刀的位置进行调整时,控制第一导轨上的第一滑块,第一滑块带动转动部和切削刀在安装盘所在的竖直面上滑动,通过对第一滑块的滑动,可让切
削刀移动至安装盘的上侧、下侧、左侧和右侧,能够有效的控制切削刀水平位置和竖直位置,能够提高切削刀位置的可调性。
9.进一步,转动部包括微型电机、与微型电机的动力输出端固定连接的支撑杆、第二导轨以及在第二滑轨上滑动的第二滑块,第二导轨的一端与安装盘的中心处转动连接,第二导轨的另一端与第一滑块固定连接,微型电机固定安装在第二滑块上,切削刀固定安装在支撑杆远离微型电机的一端上。
10.通过上述设置,在对切削刀的位置进行调整时,当第一滑块带动第二导轨的端部滑动时,第二导轨的端部绕安装盘的圆心处转动,使得切削刀保持第一滑轨的范围内,在第一滑块和第一导轨的配合下,能够快速对切削刀的位置进行较大范围的调节;在对切削刀的位置进行微调时,可滑动第二导轨上的第二滑块,使得第二滑块带动微型电机、支撑杆和切削刀沿安装盘的半径滑动,实现对切削刀水平位置和竖直位置的微调,且可让切削刀移动至第一导轨的范围内,使得切削刀的位置可调度提高,且切削刀的位置也更精准,便于对木材原料进行切削。
11.进一步,支撑杆为液压伸缩杆,液压伸缩杆连接有液压泵。
12.待木材原料的待切削处与切削刀相对后,启动液压泵,液压泵向液压伸缩杆内泵入液压油,使得液压伸缩杆伸长,此时液压伸缩杆的端部推动切削刀同步伸长,使得切削刀对木材原料的待切削处进行切削处理,进而无需连接臂带动木材原料移动,能够有效提升对木材原料固定的稳定性,也便于木材原料与切削刀配合。
13.进一步,连接臂为机械臂,固定头包括电动机以及与电动机的动力输出端固定连接的钻头,机械臂的一端与安装架固定连接,机械臂的另一端与电动机固定安装并且与安装盘设有第一滑轨的一端相对。
14.在对木材原料进行固定时,将木材原料的一侧与机械臂上的钻头相对,此时启动电动机,电动机带动钻头转动,钻头转入到木材原料的一侧内,实现对木材原料的固定和限位;在对木材原料的位置进行控制时,机械臂对电动机和钻头的控制更稳定,同时机械臂也能让钻头的角度和位置更多变,便于切削刀与木材原料的待切削处相对。
15.进一步,还包括控制单元,控制单元包括处理器、信息收集部和控制部,信息收集部包括若干摄像头和距离传感器,若干摄像头和距离传感器均固定安装在安装架上,且若干摄像头和距离传感器均位于固定单元与切削单元之间;控制部包括控制第一滑块转动的第一控制器、控制第二滑块转动的第二控制器、控制支撑杆伸长或缩短的第三控制器以及控制机械臂的靠近电动机一端角度和位置的第四控制器,第一控制器、第二控制器、第三控制器、第四控制器、若干摄像头和距离传感器均与处理器电联接。
16.在对木材原料进行加工时,初始时摄像头和距离传感器能对木材原料原有的结构信息和位置信息进行收集,处理器对木材原料的位置和角度进行处理,处理器将位置和角度控制信号传递至第四控制器中,第四控制器控制机械臂的各个臂相对转动和移动,使得机械臂带动电动机、钻头和木材原料同步移动至待加工处;与此同时,处理器可计算木材原料的待加工面与切削刀的位置关系,此时向第一控制器和第二控制器发出控制信号,对第一滑块和第二滑块的位置进行调节,使得切削刀与木材原料的待切削处相对,处理器向第三控制器发出控制支撑杆伸长的信号,即可让切削刀对木材原料进行自动化切割,切割的效率高,且能完成对立体几何模型进行切削加工。
附图说明
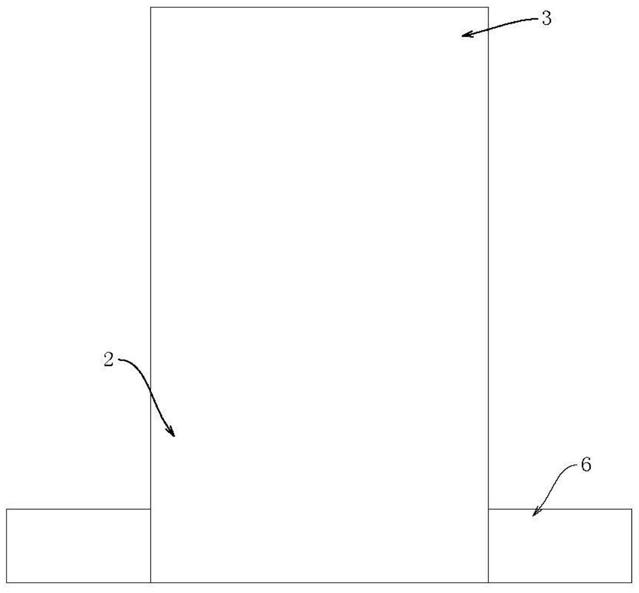
17.图1为本发明一种基于数学模型的智能加工装置主视方向结构示意图;
18.图2为图1中切削单元a
‑
a处的剖视图。
具体实施方式
19.下面通过具体实施方式进一步详细的说明:
20.说明书附图中的附图标记包括:安装架10、安装盘20、第一导轨201、第一滑块202、微型电机301、支撑杆302、第二导轨303、第二滑块304、液压泵305、机械臂40、电动机401、钻头402、摄像头501、距离传感器502、木材原料60。
21.实施例基本如附图1和附图2所示:一种基于数学模型的智能加工装置,包括安装架10、切削单元、控制单元以及能对木材原料60进行固定的固定单元,安装架10呈框体状。
22.如图1和图2所示,切削单元包括切削刀、能带动切削刀沿安装架10的竖直移动的移动部以及能带动切削刀转动的转动部,移动部包括安装盘20、圆形的第一导轨201以及在第一滑轨上滑动的第一滑块202,转动部包括微型电机301、与微型电机301的动力输出端焊接的支撑杆302、第二导轨303以及在第二滑轨上滑动的第二滑块304,安装盘20竖直焊接在安装架10上,第一导轨201同轴焊接在安装盘20的右侧上,第二导轨303的上端与安装盘20的中心处转动连接,第二导轨303的下端与第一滑块202焊接,微型电机301焊接在第二滑块304上,支撑杆302水平设置,支撑杆302为液压伸缩杆,液压伸缩杆连通有液压泵305,液压泵305焊接在安装盘20的左侧上,切削刀焊接在支撑杆302的右端上,切削刀的刀刃位于竖直平面上。
23.如图1所示,固定单元包括连接臂以及固定木材原料60的固定头,连接臂为机械臂40,固定头包括电动机401以及与电动机401的动力输出端焊接的钻头402,机械臂40的右端与安装架10焊接,机械臂40的左端与电动机401焊接并且与安装盘20设有第一滑轨的一端相对,钻头402的纵截面可与切削刀平行。
24.如图1和图2所示,控制单元包括处理器、信息收集部和控制部,信息收集部包括若干摄像头501和距离传感器502,若干摄像头501和距离传感器502均焊接在安装架10上,且若干摄像头501和距离传感器502均位于固定单元与切削单元之间;控制部包括控制第一滑块202转动的第一控制器、控制第二滑块304转动的第二控制器、控制支撑杆302伸长或缩短的第三控制器以及控制机械臂40的靠近电动机401一端角度和位置的第四控制器,第一控制器、第二控制器、第三控制器、第四控制器、若干摄像头501和距离传感器502均与处理器电联接。
25.本实施例中的一种基于数学模型的智能加工装置在使用时,先向处理器中录入所需加工的立体几何模型的参数,然后取用木材原料60,将木材原料60的一侧与机械臂40上的钻头402相对,此时启动电动机401,电动机401带动钻头402转动,钻头402转入到木材原料60的一侧内,实现对木材原料60的固定和限位,使得木材原料60被固定在机械臂40的端部上。
26.此时摄像头501和距离传感器502能对木材原料60原有的结构信息和位置信息进行收集,处理器对木材原料60的位置和角度进行处理,处理器将位置和角度控制信号传递至第四控制器中,第四控制器控制机械臂40的各个臂相对转动和移动,使得机械臂40带动
电动机401、钻头402和木材原料60同步移动至待加工处;与此同时,处理器可计算木材原料60的待加工面与切削刀的位置关系,此时向第一控制器和第二控制器发出控制信号,第一控制器控制第一滑块202沿第一滑轨移动,第一滑块202带动第二滑轨远离安装盘20中心处的一端上下移动,进而可对切削刀所在的竖直位置进行控制;与此同时第二控制器控制微型电机301沿第二滑轨同步移动,可控制微型电机301、支撑杆302和切削刀水平和竖直距离的微调,使得切削刀与木材原料60的待切削处相对;待木材原料60的待切削处与切削刀相对后,处理器向第三控制器发出控制支撑杆302伸长的信号,第三控制器与液压泵305协同控制支撑杆302伸长,进而对木材原料60的待切削处进行切削处理;待木材原料60的一侧切削完成后,摄像头501和距离传感器502能够继续收集位置和角度等信息,进而通过第一控制器、第二控制器和第三控制器再次依次控制第一滑块202、第二滑块304和支撑杆302,来调整切削刀的位置且切削动作;同时第四控制器也再次控制木材原料60与切削刀的相对角度和位置,实现对木材原料60自动化切割,木材原料60能够适应不同立体几何模型的切削加工,加工的效率高,且适应性强。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。