1.本发明涉及斜拉桥缆索检测技术领域,特别是一种磁流变阻尼器及在风载振动下的加载力控制方法。
背景技术:
2.国内外的学者对拉索检测机器人的设计与动力学研究等方面做了大量的工作,其攀爬机构可以分为滚轮式、蠕动式和仿生式三种,且大多机构的夹紧方式都是通过弹簧加载。滚轮式机器人因为其结构轻便、能耗少、爬升速度快等优点,因此受到越来越多研究工作者的关注,目前也有少数桥梁检测机构使用这种机构对桥梁拉索表面进行检测工作。尽管研究者对滚轮式机器人进行了大量研究,但仍然存在一些问题需要更深入的研究。
3.首先,目前研究的拉索检测机器人通常使用弹簧夹紧在拉索表面,受振动的影响机器人的夹紧力发生变化,进而影响机器人爬升的稳定性,造成检测图像抖动不清晰等问题。因此,通过设计减振机构以解决机器人在拉索振动情况下引起自身的振动,是目前拉索检测机器人研究的重点问题。
4.其次,对拉索检测机器人的运动学、动力学相关的研究虽然有很多,但主要集中在机构驱动性能和越障性能上,较少考虑拉索振动带来的影响,对于机器人的爬升稳定性问题尚未解决。特别是现代斜拉索桥梁结构越来越向跨度大、结构轻与阻尼低的方向发展,对高空风载和桥面车辆等随机扰动更加敏感,在高空风载和索塔振动的激励下会发生多种类型的振动。有学者在高压线巡检机器人等相似的机器人研究中考虑了线路振动对机器人移动的影响,但是这种机器人与拉索检测机器人的力加载方式不同,由此线路对机器人造成的影响以及设计的解决方案也不同。因此,考虑到拉索对机器人的作用是研究机器人动力学的重要内容。
5.大跨度斜拉桥的斜拉索是一种柔性的长直受力构件,受高空风载的影响容易产生不同形式振动。目前研究的拉索检测机器人的力加载机构大多通过弹簧产生夹紧力,粘附在斜拉索表面进行爬升。对弹簧夹紧的机器人进行室内实验发现,这种机构的机器人在拉索振动环境下容易产生夹紧力的变化,导致机器人爬升过程中出现夹紧力不足导致的打滑现象。
技术实现要素:
6.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种磁流变阻尼器及在风载振动下的加载力控制方法,该磁流变阻尼器及在风载振动下的加载力控制方法在机器人的夹紧机构中添加磁流变阻尼器以抑制机器人在爬升过程中的振动,解决目前拉索振动对机器人爬升稳定性能的影响,防止出现打滑现象。另外,分析机器人和拉索耦合振动特性,研究设计减振机构以保证机器人平稳安全爬升。
7.为解决上述技术问题,本发明采用的技术方案是:
8.一种磁流变阻尼器在风载振动下的加载力控制方法,应用在斜拉桥攀爬机器人
上,具体包括如下步骤。
9.步骤1、磁流变阻尼器安装:斜拉桥攀爬机器人为三轮机器人,包括三个滚轮、上机架和下机架;三个滚轮分别为o
a
、o
b
和o
c
;上机架的顶部安装滚轮o
a
,上机架底部和下机架中部相铰接,且铰接点为e;下机架的一端安装滚轮o
b
,下机架的另一端安装滚轮o
c
;磁流变阻尼器沿缆索长度布设,两端分别连接滚轮o
a
和o
b
;磁流变阻尼器与上机架之间的夹角为θ1,磁流变阻尼器与下机架之间的夹角为θ2;滚轮o
a
至铰接点e的距离为l2,滚轮o
c
至铰接点e的距离为l3;另外,磁流变阻尼器在当前t时刻对斜拉桥攀爬机器人沿自身轴向的加载力记为f
t
。
10.步骤2、建立坐标系:坐标系包括拉索坐标系和机器人坐标系;其中,拉索坐标系以拉索的地面安装点为原点o,水平方向为x轴,竖直方向为y轴;拉索与水平方向的夹角为α;机器人坐标系则以斜拉桥攀爬机器人的中心为原点o,拉索张紧且平衡状态下沿拉索长度方向为x向,拉索张紧且平衡状态下垂直于拉索长度方向为y向。
11.步骤3、建立f
t
、v
k
以及y(x,t)的风振模型,具体为。
[0012][0013]
其中:n=n
a
n
b
n
c
[0014][0015]
式中,v
k
为当前t时刻机器人的移动速度,为当前t时刻机器人的移动加速度;y(x,t)为拉索在当前t时刻且在机器人坐标系下y向的偏移位移;为拉索在当前t时刻且在机器人坐标系下y向的偏移加速度,为关于风速的函数,采用galerkin法求解得到;m为斜拉桥攀爬机器人的质量;n
a
、n
b
和n
c
分别为滚轮o
a
、o
b
和o
c
对拉索表面的夹紧力;n为三个滚轮对拉索表面的总夹紧力;f
fa
、f
fb
和f
fc
分别是三个滚轮的爬升驱动力;f为滚轮的滚动摩擦阻力;k
f
为风阻系数。
[0016]
步骤4、建立f
t
与b的调节模型,具体为。
[0017][0018]
其中,
[0019]
τ=p4b4 p3b3 p2b2 p1b p0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0020]
式中,k为磁流变阻尼器中弹簧的弹性系数;x为磁流变阻尼器中弹簧的初始形变量;x
′
为机器人爬升过程压缩弹簧产生的形变量;为机器人爬升过程压缩弹簧产生的形变加速度;d为磁流变阻尼器中活塞杆的直径;l为磁流变阻尼器中磁流变液通道的长度;τ为磁流变阻尼器中磁流变液的剪切屈服强度;b为磁流变阻尼器的磁感应强度;p0、p1、p2、p3和p4分别为多项拟合系数。
[0021]
步骤5、测速:斜拉桥攀爬机器人在沿缆索爬升的过程中,实时检测爬升时的风速
以及爬升速度。
[0022]
步骤6、调整f
t
:根据步骤5的风速和爬升速度,并结合步骤3建立的风振模型和步骤4建立的调节模型,计算得到对应的磁流变阻尼器的磁感应强度b;接着,通过调节磁感应强度b,进而调节加载力f
t
,使得滚轮压紧在拉索表面,避免出现打滑现象。
[0023]
步骤3中,采用galerkin法求解的方法,包括如下步骤。
[0024]
步骤31、求解f(x,t),具体求解公式为。
[0025][0026]
式中,f(x,t)为拉索在x位置且在当前t时刻所承受的风载荷;g为重力加速度;ρ为空气气流密度;u
s
为水平方向瞬时风速;u
s
为水平方向平均风速;d
c
为拉索横截面积;c
d
为拉索的阻力系数;c
l
为拉索的升力系数;δ为水平平均风速相对拉索的偏角。
[0027]
步骤32、求解q(t):拉索底端通过拉索阻尼器与地面相连接,q(t)的具体求解公式为:
[0028][0029]
式中,a为拉索阻尼器的已知质量矩阵,c为拉索阻尼器的已知阻尼矩阵,k为拉索阻尼器的已知刚度矩阵,φ
d
为拉索阻尼器对拉索的阻尼力;q(t)为拉索在当前t时刻且在机器人坐标系下y向的广义位移;为拉索在当前t时刻且在机器人坐标系下y向的广义速度;为拉索在当前t时刻且在机器人坐标系下y向的广义加速度;
[0030]
步骤33、建立y(x,t)与q(t)关系模型,具体为:
[0031][0032]
式中,为拉索的一阶振型函数,取
[0033]
步骤34、求解根据步骤31至步骤33,求解得到y(x,t),然后对y(x,t)进行二阶求导,得到
[0034]
步骤5中,斜拉桥攀爬机器人在沿缆索爬升的过程中,通过降低磁流变阻尼器的初始阻尼,从而增加斜拉桥攀爬机器人的越障能力。
[0035]
步骤6中,磁感应强度b的变化范围为0t到0.6t。
[0036]
一种磁流变阻尼器,包括活塞杆、缸筒、定位盘、导磁盘、绕线盘、励磁线圈和弹簧。
[0037]
缸筒同轴套装在活塞杆中部外周,缸筒的前端和后端均通过一个法兰盘与活塞杆密封滑动连接。
[0038]
导磁盘和绕线盘沿轴向紧密交错布设在缸筒内的活塞杆上,导磁盘和绕线盘的内圆周面与活塞杆之间形成磁流变液通道,磁流变腔体中充填有磁流变液。
[0039]
每个绕线盘上均绕设有励磁线圈,所有绕线盘上的励磁线圈相串联。
[0040]
定位盘同轴套设在位于前端法兰盘外侧的活塞杆上。
[0041]
弹簧套设在缸筒外周,弹簧一端安装在定位盘上,弹簧另一端安装在位于后端的法兰盘上。
[0042]
定位盘的一端连接滚轮o
a
或o
b
,背离定位盘一侧的活塞杆连接滚轮o
b
或o
a
。
[0043]
导磁盘的数量为四个,绕线盘的数量为三个,导磁盘设置在相邻两个绕线盘之间
以及绕线盘与法兰盘之间。
[0044]
通过改变励磁线圈中的绕线匝数n1和励磁电流i,进而调整磁流变液通道中的磁感应强度b,具体调整公式为。
[0045]
n1i=bsr
m
ꢀꢀꢀ
(8)
[0046]
式中,s为磁流变液通道的磁通面积,r
m
为磁路总磁阻。
[0047]
磁路总磁阻r
m
的计算公式为。
[0048]
r
m
=r1 2r2 2r3 r4ꢀꢀꢀꢀꢀꢀ
(9)
[0049]
其中。
[0050][0051][0052][0053][0054]
式中,r1为活塞杆磁阻;r2为导磁盘的磁阻;r3为磁流变液通道内的磁阻;r4为缸筒外壳内的磁阻;μ0为活塞杆的导磁率;μ1为磁流变液的导磁率;l
t
为导磁盘的轴向长度、l1为绕线盘的轴向长度;r1为缸筒外径;r2为缸筒内径;d为磁流变液通道的径向厚度。
[0055]
活塞杆直径d满足如下计算公式。
[0056][0057]
式中,f为活塞杆承受的轴向力,[σ]为活塞杆材料的许用应力。
[0058]
磁流变液的型号为mrf
‑
132dg。
[0059]
本发明具有如下有益效果:
[0060]
1、在机器人的夹紧机构中添加磁流变阻尼器以抑制机器人在爬升过程中的振动,解决目前拉索振动对机器人爬升稳定性能的影响,防止出现打滑现象。另外,分析机器人和拉索耦合振动特性,研究设计减振机构以保证机器人平稳安全爬升。
[0061]
2、本发明的磁流变阻尼器在拉索振动影响较大的情况下产生阻尼力以减小对机器人攀爬性能的影响,使机构平稳地爬升。
[0062]
3、建立振动环境下的拉索
‑
机器人耦合动力学模型,根据风速和爬升速度,并结合建立的风振模型和建立的调节模型,计算得到对应的磁流变阻尼器的磁感应强度b;接着,通过调节磁感应强度b,进而调节加载力f
t
,使得滚轮压紧在拉索表面,避免出现打滑现象。
[0063]
4、通过降低磁流变阻尼器的初始阻尼,从而增加斜拉桥攀爬机器人的越障能力,能够攀爬螺纹型等较高的障碍。
附图说明
[0064]
图1显示了使用本发明一种磁流变阻尼器的斜拉桥攀爬机器人的结构示意图。
[0065]
图2显示了本发明一种磁流变阻尼器的立体结构示意图。
[0066]
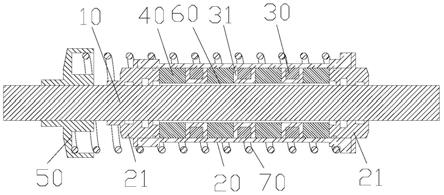
图3显示了本发明一种磁流变阻尼器的剖面结构示意图。
[0067]
图4显示了本发明中磁流变阻尼器与斜拉桥攀爬机器人的安装位置及尺寸标识示意图。
[0068]
图5显示了拉索坐标系和机器人坐标系的示意图。
[0069]
图6显示了零磁场下阻尼力f
t
与活塞杆位移的曲线图。
[0070]
图7显示了阻尼力f
t
与电流的曲线图。
[0071]
其中有:
[0072]
1.磁流变阻尼器;
[0073]
10.活塞杆;20.缸筒;21.法兰盘;30.励磁线圈;31.绕线盘;40.导磁盘;50.定位盘;60.磁流变液通道;70.弹簧;
[0074]
2.滚轮o
a
;2
‑
1.驱动电机;2
‑
2.限速机构;3.滚轮o
b
;4.滚轮o
c
;5.铰接点e;6.上机架;7.下机架;8.同步带轮。
具体实施方式
[0075]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0076]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0077]
如图1所示,一种斜拉桥攀爬机器人,为三轮机器人,包括三个滚轮、上机架6和下机架7。
[0078]
三个滚轮分别为滚轮o
a 2、滚轮o
b
3和滚轮o
c
4;其中,滚轮o
a 2、优选为驱动轮,通过驱动电机2
‑
1进行驱动,且通过限速机构2
‑
2进行限速。三个滚轮之间优选通过同步带轮8带动后,进行同步转动。作为替换,三个滚轮均可以为驱动轮,此时,斜拉桥攀爬机器人为三轮全驱动机器人。
[0079]
上机架的顶部安装滚轮o
a
,上机架底部和下机架中部相铰接,且铰接点为e 5;下机架的一端安装滚轮o
b
,下机架的另一端安装滚轮o
c
。本发明的磁流变阻尼器1沿缆索长度布设,两端分别连接滚轮o
a
和o
b
。
[0080]
如图2和图3所示,一种磁流变阻尼器,包括活塞杆10、缸筒20、定位盘50、导磁盘40、绕线盘31、励磁线圈30和弹簧70。
[0081]
缸筒同轴套装在活塞杆中部外周,缸筒的前端和后端均通过一个法兰盘21与活塞杆密封滑动连接。
[0082]
导磁盘和绕线盘沿轴向紧密交错布设在缸筒内的活塞杆上。在本实施例中,导磁盘的数量优选为四个,绕线盘的数量优选为三个,导磁盘设置在相邻两个绕线盘之间以及绕线盘与法兰盘之间。
[0083]
导磁盘和绕线盘的内圆周面与活塞杆之间形成磁流变液通道60,磁流变腔体中充填有磁流变液。
[0084]
上述磁流变液的型号优选为mrf
‑
132dg,此磁流变液在磁场作用下反应迅速,能够提供达到70kpa的剪切应力以满足阻尼器所输出的阻尼力;在零磁场情况下表现出较低的屈服强度,并允许磁场强度从0t到0.6t的控制范围。
[0085]
每个绕线盘上均绕设有励磁线圈,所有绕线盘上的励磁线圈相串联。
[0086]
定位盘同轴套设在位于前端法兰盘外侧的活塞杆上。
[0087]
弹簧套设在缸筒外周,弹簧一端安装在定位盘上,弹簧另一端安装在位于后端的法兰盘上。通过旋转后端法兰盘来调节弹簧的预紧力,以此改变机器人在拉索表面的夹紧力。
[0088]
定位盘的一端连接滚轮o
a
或o
b
,背离定位盘一侧的活塞杆连接滚轮o
b
或o
a
。
[0089]
本实施例中,磁流变阻尼器的尺寸参数优选设置如下:
[0090]
参数数值/mm活塞杆直径16磁流变液通道宽度1单个导磁盘厚度12单个绕线圈厚度10缸筒内径2
×
r132缸筒外径2
×
r236
[0091]
一种磁流变阻尼器在风载振动下的加载力控制方法,包括如下步骤。
[0092]
步骤1、磁流变阻尼器安装。
[0093]
如图4所示,将磁流变阻尼器1的两端分别连接滚轮o
a
和o
b
。此时,磁流变阻尼器与上机架之间的夹角为θ1,磁流变阻尼器与下机架之间的夹角为θ2;滚轮o
a
至铰接点e的距离为l2,滚轮o
c
至铰接点e的距离为l3;另外,磁流变阻尼器在当前t时刻对斜拉桥攀爬机器人沿自身轴向的加载力记为f
t
。
[0094]
步骤2、建立坐标系。
[0095]
如图5和图4所示,坐标系包括拉索坐标系{o
l
}和机器人坐标系{o
k
};其中,拉索坐标系以拉索的地面安装点为原点o,水平方向为x轴(也称x
l
轴),竖直方向为y轴(也称y
l
轴);拉索与水平方向x
l
轴的夹角为α。
[0096]
机器人坐标系则以斜拉桥攀爬机器人的中心为原点o,拉索张紧且平衡状态下沿拉索长度方向为x向(也称x
k
轴),拉索张紧且平衡状态下垂直于拉索长度方向为y向(也称y
k
轴)。
[0097]
步骤3、建立f
t
、v
k
以及y(x,t)的风振模型,具体为:
[0098][0099]
其中:n=n
a
n
b
n
c
[0100][0101]
式中,v
k
为当前t时刻机器人的移动速度,为当前t时刻机器人的移动加速度;y(x,t)为拉索在当前t时刻且在机器人坐标系下y向的偏移位移;为拉索在当前t时刻且在机器人坐标系下y向的偏移加速度,为关于风速的函数,采用galerkin法求解得到;m为斜拉桥攀爬机器人的质量;n
a
、n
b
和n
c
分别为滚轮o
a
、o
b
和o
c
对拉索表面的夹紧力;n为三个滚轮对拉索表面的总夹紧力;f
fa
、f
fb
和f
fc
分别是三个滚轮的爬升驱动力;f为滚轮的滚动摩擦阻力;k
f
为风阻系数。
[0102]
步骤3中,采用galerkin法求解的方法,包括如下步骤。
[0103]
步骤31、求解f(x,t),具体求解公式为。
[0104][0105]
式中,f(x,t)为拉索在x位置且在当前t时刻所承受的风载荷;g为重力加速度;ρ为空气气流密度;u
s
为水平方向瞬时风速;u
s
为水平方向平均风速(通常为观测10分钟内的平均风速);d
c
为拉索横截面积;c
d
为拉索的阻力系数;c
l
为拉索的升力系数;δ为水平平均风速相对拉索的偏角。
[0106]
步骤32、求解q(t):拉索底端通过拉索阻尼器与地面相连接,q(t)的具体求解公式为:
[0107][0108]
式中,a为拉索阻尼器的已知质量矩阵,c为拉索阻尼器的已知阻尼矩阵,k为拉索阻尼器的已知刚度矩阵,φ
d
为拉索阻尼器对拉索的阻尼力;q(t)为拉索在当前t时刻且在机器人坐标系下y向的广义位移;为拉索在当前t时刻且在机器人坐标系下y向的广义速度;为拉索在当前t时刻且在机器人坐标系下y向的广义加速度。
[0109]
步骤33、建立y(x,t)与q(t)关系模型,具体为:
[0110][0111]
式中,为拉索的一阶振型函数,取
[0112]
步骤34、求解根据步骤31至步骤33,求解得到y(x,t),然后对y(x,t)进行二阶求导,得到
[0113]
步骤4、建立f
t
与b的调节模型,具体为:
[0114][0115]
其中,
[0116]
τ=p4b4 p3b3 p2b2 p1b p0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0117]
式中,k为磁流变阻尼器中弹簧的弹性系数;x为磁流变阻尼器中弹簧的初始形变量;x
′
为机器人爬升过程压缩弹簧产生的形变量;为机器人爬升过程压缩弹簧产生的形
变加速度;d为磁流变阻尼器中活塞杆的直径;l为磁流变阻尼器中磁流变液通道的长度;τ为磁流变阻尼器中磁流变液的剪切屈服强度;b为磁流变阻尼器的磁感应强度;p0、p1、p2、p3和p4分别为多项拟合系数,优选为:p4=
‑
304kpa/t4,p3=
‑
756kpa/t3,p2=793.9kpa/t2,p1=
‑
41.31kpa/t,p0=1.073kpa。
[0118]
步骤5、测速:斜拉桥攀爬机器人在沿缆索爬升的过程中,实时检测爬升时的风速以及爬升速度。
[0119]
上述斜拉桥攀爬机器人在沿缆索爬升的过程中,通过降低磁流变阻尼器的初始阻尼,从而增加斜拉桥攀爬机器人的越障能力。
[0120]
在磁流变阻尼器内部磁回路中,活塞杆和缸筒的磁通面积较小,为了避免这部分的磁感应强度过早饱和导致阻尼器输出阻尼力无法达到要求的最大阻尼力,导磁盘不能太厚。单级线圈和二级线圈结构下经过内部磁场有限元分析,导磁盘两侧位置的磁感应器强度较低,而靠近线圈部分的磁感应强度较高且超过饱和磁感应强度。结合阻尼器尺寸要求和内部磁场有限元分析结果,将内部结构设计为三级线圈结构,通过有限元分析可以满足磁场强度的设计要求。
[0121]
机器人在翻越障碍物的过程中,需要上图中压缩弹簧进一步变形压缩,如果此时阻尼器的阻尼力过大,势必会导致压缩弹簧无法变形而使机器人卡死在障碍位置。在剪切模式下,磁流变阻尼器在零磁场情况下输出阻尼力如图6所示,此时阻尼器输出阻尼力较小,适合机器人在越障过程中翻越障碍物。
[0122]
机器人在越障过程中,通过降低磁流变阻尼器输入电流使压缩弹簧更易于形变。障碍物高度越高,磁流变阻尼器输入电流越小,通过图7中阻尼力与电流的关系可以控制磁流变阻尼器输出线圈电流的大小。
[0123]
爬升越障实验:大跨度斜拉桥拉索长期暴露于空气当中,其外层pe防护材料产生老化和龟裂,形成拉索表面的凹坑和凸起。此外,为了抑制斜拉索受到风振、雨振的影响,通常会在其表面设置螺旋肋条、设置圆形或椭圆形凹坑或凸点。这些因素都将构成拉索检测机器人爬升过程中的障碍物。因此,拉索检测机器人在检测作业过程中需要有一定的越障能力。
[0124]
通过在实验室搭建的拉索实验平台的直径为90mm的硬pvc管上套上高度为7mm的障碍物,振动台振动频率设置为5hz,振幅为2mm,实验测试机器人的三个滚轮均可以顺利爬升通过障碍物。机器人在越障过程中刚接触到障碍物时,速度发生明显的下降,但下降幅度不超过0.01m/s,因此在振动条件下机器人仍可稳定通过一定高度的障碍物。
[0125]
步骤6、调整f
t
:根据步骤5的风速和爬升速度,并结合步骤3建立的风振模型和步骤4建立的调节模型,计算得到对应的磁流变阻尼器的磁感应强度b;接着,通过调节磁感应强度b,进而调节加载力f
t
,使得滚轮压紧在拉索表面,避免出现打滑现象。
[0126]
上述磁感应强度b的变化范围优选为0t到0.6t;通过改变励磁线圈中的绕线匝数n1和励磁电流i,进而调整磁流变液通道中的磁感应强度b,具体调整公式为。
[0127]
n1i=bsr
m
ꢀꢀꢀ
(8)
[0128]
式中,s为磁流变液通道的磁通面积,r
m
为磁路总磁阻。
[0129]
磁路总磁阻r
m
的计算公式为。
[0130]
r
m
=r1 2r2 2r3 r4ꢀꢀꢀꢀꢀꢀ
(9)
[0131]
其中。
[0132][0133][0134][0135][0136]
式中,r1为活塞杆磁阻;r2为导磁盘的磁阻;r3为磁流变液通道内的磁阻;r4为缸筒外壳内的磁阻;μ0为活塞杆的导磁率;μ1为磁流变液的导磁率;l
t
为导磁盘的轴向长度、l1为绕线盘的轴向长度;r1为缸筒外径;r2为缸筒内径;d为磁流变液通道的径向厚度。
[0137]
上述活塞杆直径d满足如下计算公式。
[0138][0139]
式中,f为活塞杆承受的轴向力,[σ]为活塞杆材料的许用应力。
[0140]
本发明通过仿真分析可知:
[0141]
1、当力加载机构只有压缩弹簧时,拉索随机振动产生的惯性力作用在机构上产生机构的受迫振动,此时弹簧的刚度决定机构位移的大小。对比弹簧加载机构和弹簧
‑
磁流变阻尼耦合加载机构的振动响应计算结果,拉索的振动会引起力加载机构较为明显的振动,弹簧加载机构的最大振幅为76.1356mm,使用改进后的弹簧
‑
磁流变阻尼耦合加载机构,将阻尼器励磁线圈的输入电流设定为0.2a,则其最大振幅为13.9419mm,是使用弹簧加载机构产生最大振幅的0.18倍。因此,采用阻尼器的力加载机构能够有效地抑制振动。
[0142]
2、随着风速的增大,拉索振动的加速度增大较为明显,因此作用在机器人上的惯性力也随之增大。
[0143]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

