1.本实用新型涉及一种玩具制作技术领域,尤其指一种能仿真恐龙动作的玩具恐龙。
背景技术:
2.现有一种申请号为cn201420773119.8名称为《一种仿真玩具恐龙》的中国实用新型专利公开了一种仿真玩具恐龙,包括头部、支持所述头部的躯干,以及分别与所述躯干连接的两前爪、两后爪和尾部,其特征在于,所述躯干一端用于摆动头部的设有摆动机构;所述摆动机构与头部相连接;所述摆动机构包括第一电机、齿轮组、转轮和摆动球;所述第一电机通过齿轮组联动转轮;所述转轮靠近边缘处设有摆动杆;所述摆动杆与摆动球固定连接;所述摆动球与头部固定连接;所述头部与摆动杆不在同一轴线。该实用新型通过设有用于摆动头部的摆动机构,使恐龙头部可以摆动;设有可活动的下颚,模拟出恐龙咬合的状态;后爪可前后摆动,形成恐龙在行走的效果。然而,该玩具恐龙活动幅度较小,因此该玩具恐龙的结构还需进一步改进。
技术实现要素:
3.本实用新型所要解决的技术问题是针对上述现有技术现状而提供一种模仿动作幅度大,娱乐效果好的能仿真恐龙动作的玩具恐龙。
4.本实用新型解决上述技术问题所采用的技术方案为:本能仿真恐龙动作的玩具恐龙,包括头部,躯干,左前肢,右前肢,左后肢,右后肢和尾巴,在躯干内部设置有能驱动头部和尾巴摆动的驱动机构,其特征在于:在所述躯干上分布有能伸出驱动机构、尾巴、左后肢、右后肢的躯干缺口,驱动机构的转动盘能转动地连接在躯干前部的第一缺口上,所述头部连接在转动盘的前部并能由转动盘驱动相对躯干左右摆动,左前肢和右前肢分别连接在转动盘两侧的躯干的外表面上,左后肢和右后肢均为双摇杆结构,左后肢和右后肢的上端分别穿过对应的躯干缺口与驱动机构相连接,所述驱动机构能驱动左后肢和右后肢相对躯干前后摆动,在所述左后肢和右后肢的底端分别能转动地设置有能在头部摆动时保持玩具恐龙平衡的鞋体。
5.作为改进,在所述躯干内设置有支架,所述驱动机构连接在支架上,所述驱动机构包括驱动电机、齿轮组、转动盘、第一驱动杆、第二驱动杆、第一驱动轴、第二驱动轴、间歇驱动机构和尾巴驱动部,所述第一驱动轴和第二驱动轴分别能转动地连接在支架上,驱动电机的输出齿轮与齿轮组传动相啮合,所述第一驱动轴和第二驱动轴分别与齿轮组相连接,所述间歇驱动机构连接在齿轮组中,所述间歇驱动机构经齿轮组间歇地驱动第一驱动轴和第二驱动轴转动,所述齿轮组驱动第一驱动轴转动时,所述第一驱动轴驱动左后肢和右后肢前后摆动,所述齿轮组驱动第二驱动轴转动时,所述第二驱动轴带动第一驱动杆和第二驱动杆活动,所述第一驱动杆与转动盘传动相连接,所述第二驱动杆与尾巴驱动部传动相连接,所述尾巴驱动部与尾巴相连接而能驱动尾巴摆动。
6.进一步改进,所述尾巴驱动部包括设置在支架后部的定位柱和能转动地连接在定位柱上的转动体,所述转动体的一端与尾巴相连接,所述转动体的侧部与第二驱动杆活动相连接。
7.进一步改进,第二驱动轴的一端伸出支架与偏心轮相连接,第二驱动杆的上端与偏心轮的偏心柱体转动相连接,第二驱动杆的下端的凸部插接在转动体侧部的卡扣凸部的通孔中,第一驱动杆的中部能转动地连接在支架上,第一驱动杆的上端设置有腰型孔,所述腰型孔套接在偏心柱体上,第一驱动杆的下端与传动凸杆活动相连接,所述传动凸杆与转动盘传动相连接。
8.作为改进,所述躯干由左半壳和右半壳对合而成,在与转动盘对应的左半壳和右半壳上均设置有插接转动盘的转动盘轴的连接缺口,转动盘的转动盘轴能转动地设置在对合的连接缺口中。
9.作为改进,所述左前肢和右前肢经防水胶固定在躯干外壁的对应位置上。
10.作为改进,在所述支架的底部设置有能安装电池的安装部以及能控制电源接通和断开的开关,电池、所述驱动电机和开关构成回路。
11.作为改进,所述第一驱动轴的左端伸出支架与左偏心传动轮相连接,所述第一驱动轴的右端伸出支架与右偏心传动轮相连接,所述左后肢包括左第一肢杆和左第二肢杆,左第一肢杆的一端能转动地连接在支架上,左第一肢杆的另一端能转动地连接在左鞋体上,左第二肢杆的一端能转动地连接在左鞋体上,左第二肢杆的另一端设置有第二腰形孔,所述第二腰形孔套接在左偏心传动轮的偏心柱体上,所述右后肢包括右第一肢杆和右第二肢杆,右第一肢杆的一端能转动地连接在支架上,右第一肢杆的另一端能转动地连接在右鞋体上,右第二肢杆的一端能转动地连接在右鞋体上,右第二肢杆的另一端设置有第三腰形孔,所述第三腰形孔套接在右偏心传动轮的偏心柱体上。
12.进一步改进,所述左鞋体和右鞋体的底部设置有能减小摩擦的滚轮。
13.作为改进,所述齿轮组包括第一齿轮、第二齿轮、第三齿轮、第四齿轮、第五齿轮、第六齿轮、第七齿轮、第八齿轮、第九齿轮、第十齿轮,所述输出齿轮与第一齿轮相啮合,第一齿轮与第二齿轮同心设置而能转动地连接在支架上,第二齿轮与第三齿轮相啮合,第三齿轮与第四齿轮同心设置而能转动地连接在支架上,第四齿轮与第五齿轮、第六齿轮相啮合,所述第五齿轮经转轴能转动地连接在支架上,所述第六齿轮和第七齿轮同心连接在滑动套上,所述滑动套套在转轴上,所述第七齿轮的一侧经弹簧与支架侧壁相顶触,所述第五齿轮和第六齿轮齿数不相同而能相对转动,所述间歇驱动机构是设置在第五齿轮侧壁上的第一凸部和设置在第六齿轮侧壁上的第二凸部,第一凸部的第一侧壁与第二凸部上对应的第二侧壁是能相互顶触而逐渐分离的斜面,第八齿轮与第一驱动轴同心连接,所述第九齿轮能相对支架转动地连接在支架上,所述第十齿轮与第九齿轮相啮合,所述第十齿轮与第二驱动轴同心相连接,当第一凸部与第二凸部端面未顶触在一起时,所述第七齿轮与第八齿轮啮合而与第九齿轮相分离,当第一凸部与第二凸部端面顶触在一起时,所述第七齿轮与第八齿轮分离而与第九齿轮啮合。
14.与现有技术相比,本实用新型的优点在于:通过驱动机构实现头部和尾部的摆动,以及左后肢和右后肢的摆动,从而模仿恐龙跳舞,具有良好的娱乐效果;通过转动盘来实现对头部摆动的控制,从而使头部能大范围的摆动,增加了玩具恐龙的摆动幅度,同时通过在
左后肢和右后肢的底部设置鞋体来提高玩具恐龙的摆放稳定性,当头部大幅度摆动时也能保持玩具恐龙的平衡从而使玩具恐龙保持在恐龙站立的姿势中,避免倾覆。
附图说明
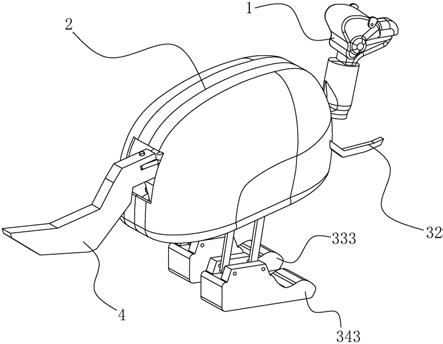
15.图1为本实用新型实施例的立体图;
16.图2为图1的结构分解图;
17.图3是图2的进一步结构分解图;
18.图4是图3中去除躯干和左后肢以及右后肢后的结构分解图;
19.图5是图4中与齿轮组相关结构的立体图;
20.图6是图5处于另一个角度的立体图;
21.图7是图6中间歇驱动机构的结构分解图。
具体实施方式
22.以下结合附图实施例对本实用新型作进一步详细描述。
23.如图1至图7所示,本实施例的能仿真恐龙动作的玩具恐龙,包括头部1,躯干2,左前肢31,右前肢32,左后肢,右后肢和尾巴4,在躯干2内部设置有能驱动头部1和尾巴4摆动的驱动机构,在躯干2上分布有能伸出驱动机构、尾巴4、左后肢、右后肢的躯干缺口,驱动机构的转动盘11能转动地连接在躯干2前部的第一缺口21上,头部1连接在转动盘11的前部并能由转动盘11驱动相对躯干2左右摆动,左前肢31和右前肢32分别连接在转动盘11两侧的躯干2的外表面上,左后肢和右后肢均为双摇杆结构,左后肢和右后肢的上端分别穿过对应的躯干缺口与驱动机构相连接,驱动机构能驱动左后肢和右后肢相对躯干2前后摆动,在左后肢和右后肢的底端分别能转动地设置有能在头部1摆动时保持玩具恐龙平衡的鞋体。
24.在躯干2内设置有支架8,驱动机构连接在支架8上,驱动机构包括驱动电机7、齿轮组、转动盘11、第一驱动杆81、第二驱动杆82、第一驱动轴83、第二驱动轴84、间歇驱动机构和尾巴驱动部,第一驱动轴83和第二驱动轴84分别能转动地连接在支架8上,驱动电机7的输出齿轮70与齿轮组传动相啮合,第一驱动轴83和第二驱动轴84分别与齿轮组相连接,间歇驱动机构连接在齿轮组中,间歇驱动机构经齿轮组间歇地驱动第一驱动轴83和第二驱动轴84转动,齿轮组驱动第一驱动轴83转动时,第一驱动轴83驱动左后肢和右后肢前后摆动,齿轮组驱动第二驱动轴84转动时,第二驱动轴84带动第一驱动杆81和第二驱动杆82活动,第一驱动杆81与转动盘11传动相连接,第二驱动杆82与尾巴驱动部传动相连接,尾巴驱动部与尾巴4相连接而能驱动尾巴4摆动。
25.尾巴驱动部包括设置在支架8后部的定位柱85和能转动地连接在定位柱85上的转动体86,转动体86的一端与尾巴4相连接,转动体86的侧部与第二驱动杆82活动相连接。第二驱动轴84的一端伸出支架8与偏心轮87相连接,第二驱动杆82的上端与偏心轮87的偏心柱体转动相连接,第二驱动杆82的下端的凸部插接在转动体86侧部的卡扣凸部861的通孔中,第一驱动杆81的中部能转动地连接在支架8上,第一驱动杆81的上端设置有腰型孔,腰型孔套接在偏心柱体上,第一驱动杆81的下端与传动凸杆88活动相连接,传动凸杆88与转动盘11传动相连接。
26.躯干2由左半壳201和右半壳202对合而成,在与转动盘11对应的左半壳201和右半
壳202上均设置有插接转动盘11的转动盘轴111的连接缺口,转动盘11的转动盘轴111能转动地设置在对合的连接缺口中。左前肢31和右前肢32经防水胶固定在躯干2外壁的对应位置上。在支架8的底部设置有能安装电池的安装部89以及能控制电源接通和断开的开关891,电池、驱动电机7和开关891构成回路。
27.第一驱动轴83的左端伸出支架8与左偏心传动轮831相连接,第一驱动轴83的右端伸出支架8与右偏心传动轮832相连接,左后肢包括左第一肢杆331和左第二肢杆332,左第一肢杆331的一端能转动地连接在支架8上,左第一肢杆331的另一端能转动地连接在左鞋体333上,左第二肢杆332的一端能转动地连接在左鞋体333上,左第二肢杆332的另一端设置有第二腰形孔,第二腰形孔套接在左偏心传动轮831的偏心柱体上,右后肢包括右第一肢杆341和右第二肢杆342,右第一肢杆341的一端能转动地连接在支架8上,右第一肢杆341的另一端能转动地连接在右鞋体343上,右第二肢杆342的一端能转动地连接在右鞋体343上,右第二肢杆342的另一端设置有第三腰形孔,第三腰形孔套接在右偏心传动轮832的偏心柱体上。左鞋体333和右鞋体343的底部设置有能减小摩擦的滚轮。
28.齿轮组包括第一齿轮71、第二齿轮72、第三齿轮73、第四齿轮74、第五齿轮75、第六齿轮76、第七齿轮77、第八齿轮78、第九齿轮79、第十齿轮710,输出齿轮70与第一齿轮71相啮合,第一齿轮71与第二齿轮72同心设置而能转动地连接在支架8上,第二齿轮72与第三齿轮73相啮合,第三齿轮73与第四齿轮74同心设置而能转动地连接在支架8上,第四齿轮74与第五齿轮75、第六齿轮76相啮合,第五齿轮75经转轴751能转动地连接在支架8上,第六齿轮76和第七齿轮77同心连接在滑动套761上,滑动套761套在转轴751上,第七齿轮77的一侧经弹簧711与支架8侧壁相顶触,第五齿轮75和第六齿轮76齿数不相同而能相对转动,间歇驱动机构是设置在第五齿轮75侧壁上的第一凸部752和设置在第六齿轮76侧壁上的第二凸部762,第一凸部752的第一侧壁与第二凸部762上对应的第二侧壁是能相互顶触而逐渐分离的斜面,第八齿轮78与第一驱动轴83同心连接,第九齿轮79能相对支架8转动地连接在支架8上,第十齿轮710与第九齿轮79相啮合,第十齿轮710与第二驱动轴84同心相连接,当第一凸部752与第二凸部762端面未顶触在一起时,第七齿轮77与第八齿轮78啮合而与第九齿轮79相分离,当第一凸部752与第二凸部762端面顶触在一起时,第七齿轮77与第八齿轮78分离而与第九齿轮79啮合。
29.工作原理:当第一凸部与第二凸部端面未顶触在一起时,第七齿轮与第八齿轮啮合而与第九齿轮相分离,第八齿轮带动第一驱动轴转动,从而左右后肢前后摆动,模仿恐龙行走;当第一凸部与第二凸部端面顶触在一起时,第七齿轮与第八齿轮分离而与第九齿轮啮合,第九齿轮驱动第十齿轮转动,第十齿轮驱动第二驱动轴转动,从而头部摆动,尾巴摆动;这两个状态循环地动作,从而达到模仿恐龙跳舞的动作效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

