1.本发明属于并网发电相位同步领域,涉及一种自适应并网变流器单相软锁相环,尤其是一种基于正交信号发生的电网电压软锁相环。
背景技术:
2.目前的民用单相电网因受到接入的电力电子设备增加的影响,存在较大的电网谐波以及直流偏移等问题。因此,非理想电网条件下电网的同步信息较难获取,包括幅值、频率和相角的准确在线实时估计带来了较大的难度。锁相环技术是获取电网同步信息的技术之一。
3.现有技术中,采用硬件单相锁相环会使成本提升,在电网过零点使会产生误判现象。软件实现的锁相环较为容易实现,其中有基于延时模块产生正交信号辅助鉴频的锁相环技术。但是基于延时模块在信号频率发生偏移时,锁相环进入锁相的稳态后的会有较大的二次波动,不利于同步信息的检测。
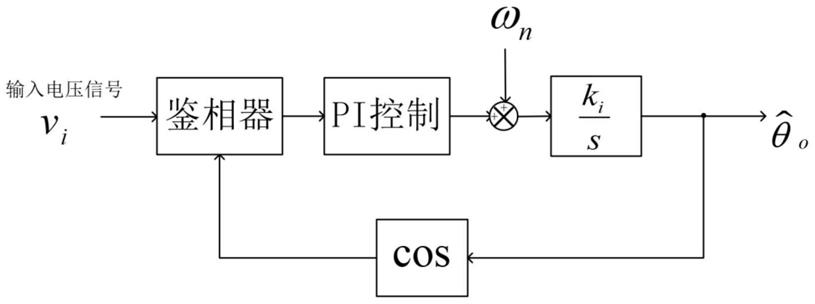
4.传统锁相环结构图(图1所示)、含延时模块的锁相环(td
‑
pll,图2所示)的不足在于在电网频率发生变化时,信号经锁相环鉴频模块的计算会产生二倍频的扰动项,从而使锁相环的性能和准确性降低。
技术实现要素:
5.本发明的目的在于克服现有技术的缺点,提出一种修正正交信号正交性单相软锁相环。改进了传统基于延时信号在锁相稳态时二倍频分量对电网电压锁相结果的影响,并保证了锁相环动态响应时间。
6.本发明提供的单相锁相环,包括:设计正交信号产生模块1。输入信号进入正交信号发生模块后可以输出与之正交的信号。在输入信号的频率发生偏移时,正交信号发生模块依然可以保证输入信号与输出信号的正交性。设计正交信号处理模块2。然后将正交信号处理模块2的输出信号输入到相角估计模块3中进行计算。设计相角估计模块3。将计算模块中pi控制中积分器处理后的信号送入正交信号产生模块1中,将计算模块的输出信号输入到正交信号的处理模块中。
7.所述的单相锁相环实现方法,按照如下的步骤:
8.步骤1,根据工程条件确定锁相环中比例积分器的工作参数。具体地,通过数学公式确定k
p
、k
i
参数。
9.以ω
n
=2π*20rad/s为例,可以得到锁相环的k
p
、k
i
参数分别为:k
i
=40212.386、k
p
=553.08。
10.步骤2,对采样得到的单相电网电压进行标幺,并将标幺结果送入正交信号产生模块1。
11.步骤3,将原始输入信号和正交输入信号正确接入正交信号处理模块2。
12.步骤4,将正交信号处理模块2得到的信号输入相角估计模块3中,进行计算。
13.步骤5,将相角估计模块3中积分器的输出量作为反馈量送入正交信号产生模块1中,将相角估计模块3输出的相角估计值作为反馈量送入正交信号处理模块2中。
14.本发明的具体结构为:
15.一种基于正交信号发生的单相电压软锁相环,包括:正交信号产生模块1、正交信号处理模块2、相角估计模块3。其中,
16.所述正交信号产生模块1产生一个与输入信号正交的信号,然后将输入信号和该正交信号都输入到正交信号处理模块2中。
17.正交信号处理模块2的输入信号是原始输入信号和正交信号产生模块1的输出信号。
18.相角估计模块3由pi控制和积分模块组成。相角估计模块3的输入信号是正交信号处理模块2的输出信号,相角输出模块中经pi控制处理过的信号送入正交信号产生模块1,相角输出模块的输出信号送入正交信号处理模块2。
19.进一步说,本单相锁相环的正交信号产生模块1与正交信号处理模块2,用以消除锁相环稳态时二倍频分量对锁相结果的影响,同时保证了锁相环动态响应的性能。
20.进一步说,本单相锁相环用于非理想电网条件下的相位在线估计。
21.进一步说,正交信号产生模块1,也可称为正交信号发生模块,由子模块:延时模块1.01、加法器一1.02、除法器1.03、乘法器一1.04、三角函数计算模块一1.05、三角函数计算模块二1.06和增益模块1.07构成。
22.延时模块1.01为延时t\4模块,可使输入信号采样实现延迟t\4的功能,延时模块1.01也可称为延迟信号环节。
23.三角函数计算模块一1.05和三角函数计算模块二1.06,均可以输出对应于输入的三角函数数值。
24.增益模块1.07的增益为t\4。
25.输入信号v
i
经延时模块1.01输出信号v
β
,使用输入信号v
i
、信号v
β
、由相角估计模块3中的反馈信号δω
o
通过加法器一1.02、除法器1.03、乘法器一1.04、三角函数计算模块一1.05、三角函数计算模块二1.06和增益模块1.07产生信号v
c
,具体地:
[0026][0027]
其中,为输入的电网电压信号,输入电网电压信号相位为v
i
为电压幅值、ω
i
为信号角频率、t为时间、为初相角。ω
n
为额定状态下的电网频率、δω
o
=ω
o
‑
ω
n
为输入角频率的估计值与正常电网角频率的差值、t为额定频率时信号的周期。v
β
(t)为输入电网电压信号v
i
(t)延迟个周期得到的信号,v
c
(t)为与输入信号正交的信号。
[0028]
然后将信号v
i
、v
a
、v
c
作为正交信号产生模块1,也可称为正交信号发生模块的输
出。此处v
i
=v
a
。
[0029]
进一步说,正交信号处理模块2由子模块:矩阵变换模块2.01、三角函数计算模块三2.02、三角函数计算模块四2.03、加法器二2.04构成。
[0030]
矩阵变换模块2.01实现以下的数学功能:
[0031][0032]
x
α
为电网电压的输入信号。x
β
为正交信号产生模块的输出信号。x
d
为矩阵运算的的输出量1,作为加法器二2.04的输入量。x
q
为矩阵运算的输出量2,作为加法器二2.04的输入量2。θ为矩阵变换的角度输入,使用相角估计模块的输出作为θ。
[0033]
三角函数计算模块三2.02和三角函数计算模块四2.03均可以输出对应于输入的三角函数数值。
[0034]
将正交信号产生模块1的输出信号v
a
、v
c
输入到矩阵变换模块中进行变换得v
d
、v
q
。
[0035]
具体地,对v
c
(t)进行变换得v
d
(t)=v
c
(t)[cos(θ0) sin(θ0)]。
[0036]
对v
i
(t)v
α
(t)进行变换得v
q
(t)=v
α
(t)[cos(θ0)
‑
sin(θ0)],其中θ0为相角估计模块3中输出的估计相角值。
[0037]
其中,为输入电网电压信号相位估计值、v
c
(t)为与输入信号正交的信号。
[0038]
然后将信号v
d
、v
q
通过加法器二2.04相加,得正交信号处理模块2的输出值v
dq
。
[0039]
进一步说,相角估计模块3由子模块:比例积分控制器的比例放大模块3.01、比例积分控制器的积分模块3.02、加法器三3.03、加法器四3.04、积分模块二3.05构成。
[0040]
正交信号处理模块2的输出信号v
dq
通过比例积分控制器的积分模块3.02生成角频率偏差估计值δω
o
。将工频ω
nf
与比例积分控制器的积分模块3.02输出得到加法器三3.03的输出信号。工频ω
nf
又称为电网额定频率ω
nf
。然后将加法器三3.03生成的信号与v
dq
经比例积分控制器的比例放大模块3.01计算后的结果通过加法器四3.04和积分模块二3.05进行计算,得到输入信号的相角估计值θ
o
。
[0041]
最后,将θ
o
和δω
o
作为反馈量分别输入到正交信号产生模块1和正交信号处理模块2中。
[0042]
使用本发明所述的消除二倍频分量影响的单相锁相环时,将输入信号v
i
、相角估计模块3中比例积分控制器的积分模块3.02计算得到信号δω
o
共同输入正交信号产生模块1进行计算,从而得到两个互相正交的信号v
a
、v
c
。其中,
[0043]
输入电压信号端v
i
与延时模块1.01、乘法器一1.04、输出端v
a
相连接。
[0044]
相角估计模块3中的比例积分控制器的积分模块3.02的输出端输出δω
o
到正交信号产生模块1中增益模块1.07的输入端。
[0045]
正交信号产生模块1的输出信号v
a
、v
c
与正交信号处理模块2的输入端相连接。
[0046]
相角估计模块3的积分模块二3.05的输出端得到的输出相角估计值θ
o
送往正交信号处理模块2中,并与三角函数计算模块三2.02、三角函数计算模块四2.03相连接。
[0047]
正交信号处理模块2输出的值为鉴频信号v
pq
。
[0048]
正交信号处理模块2的输出值v
pq
与相角估计模块3的输入端相连,经计算得到相应的输出值θ
o
和反馈值δω
o
。
[0049]
进一步说,所指正交的信号,是在任意频率下与输入电网电压信号都正交的信号。
[0050]
获得该任意频率下与输入电网电压信号都正交的信号的具体过程为:使用了相角估计模块3中积分器的输出量作为反馈,构建一个正交信号的修正单元。用一个正交修正环节对信号的正交性进行修正。使用相角估计模块3中经过积分模块得到的δω0输入到正交信号产生模块1中,然后使用数学处理得到与输入信号v
i
(t)正交的信号v
c
(t)。
[0051]
具体地,正交信号模块输出的信号为:
[0052][0053]
其中为输入的电网电压信号\输入电网电压信号相位为v
i
为电压幅值、ω
i
为信号角频率、为初相角、ω
n
为正常状态下的电网频率、δω
i
=ω
i
‑
ω
n
为输入频率与正常电网频率的差值、θ
i
为信号相位、t为额定频率时信号的周期、v
β
(t)为输入电网电压信号v
i
(t)延迟t/4个周期得到的信号。
[0054]
进一步说,正交信号处理模块2起到消除二倍频分量影响的功能,其处理正交信号的具体过程为:使用dq变换处理输入的一组正交信号,然后将变换后的d轴分量和q轴分量相加,提升锁相环的动态响应性能。具体地,dq变换模块按照如下数学公式进行变换:
[0055][0056]
其中,x
α x
β
为输入分量,x
d x
q
为输出分量,θ为输入角度。
[0057]
进一步说,只有正交信号处理模块2负责消除二倍频分量。
[0058]
相角估计模块3使用下列公式对锁相环中的k
p
、k
i
参数进行选择:
[0059][0060]
根据工程需求选择阻尼系数ζ和锁相环的工作带宽ω
n
给出比例积分器中合适的k
p
、k
i
参数。其中,参数k
p
和k
i
是相角估计模块3中比例积分控制器的参数。k
p
是比例放大环节的增益参数,用于实现对输入信号的比例放大的功能。k
i
是积分环节的增益参数,用于实现的对输入信号进行积分后的比例放大功能。k
p
和k
i
参数的选择会影响比例积分控制器的性能,为了适应不同的工程需求,需要对参数k
p
和k
i
进行选择。
[0061]
本发明的有益效果:
[0062]
本发明的单相锁相环保证了在频率偏移时输入信号与其正交信号的正交性,从而达到在锁相稳态时候完全消除二倍频分量对电网电压锁相结果的影响。同时,本发明的锁相环也保证了锁相的快速性。采用本发明锁相环和传统同步坐标系下单相锁相环的对比如图4所示:从图4可以看出,采用本发明锁相环消除了二倍频分量对锁相环稳态的影响,锁相环的输出频率没有波动,同时本发明提升了锁相环的动态响应时间。
附图说明:
[0063]
图1为传统锁相环结构图。
[0064]
图2为含延时模块的锁相环(td
‑
pll)结构图。
[0065]
图3为本发明锁相环(dq
‑
td
‑
pll)结构图。
[0066]
图4为图3所述本发明锁相环(dq
‑
td
‑
pll)的详细流程图。
[0067]
图5是图3中正交信号产生模块1的详细流程图。
[0068]
图6是图3中正交信号处理模块2的详细流程图。
[0069]
图7是图3中相角估计模块3的详细流程图。
[0070]
图8为本发明锁相环(dq
‑
td
‑
pll)和含延时模块的锁相环(td
‑
pll)的性能对比图。
[0071]
图9为图8为0
‑
0.11s时刻的放大示意图。
[0072]
图10为0.18s
‑
0.32s时刻的放大示意图。
[0073]
图11为0.38s
‑
0.54s时刻的放大示意图。
具体实施方式:
[0074]
下面结合附图对本发明做进一步详细描述:
[0075]
参见图3和4,为解决现有技术中存在的问题,本发明提出一种基于延时模块生成正交信号的锁相环。具体地,如图3所示该锁相环包括正交信号产生模块1、正交信号处理模块2、相角估计模块3。具体地:
[0076]
所述正交信号产生模块1如图5所示,该模块产生一个与输入信号正交的信号,然后将输入信号和该正交信号都输入到正交信号处理模块2中。
[0077]
正交信号处理模块2流程图如图6所示,该模块的输入信号是原始输入信号和正交信号产生模块1的输出信号,正交信号处理模块2可以输出一个鉴频信号并输入到相角估计模块3中。
[0078]
相角估计模块3流程图如图7所示,该模块的输入信号是正交信号处理模块2的输出信号,相角输出模块3中经积分器计算输出的信号作为反馈信号送入正交信号产生模块1,相角输出模块的输出信号作为反馈信号送入正交信号处理模块2。
[0079]
采用本发明与传统基于延时单元的单相锁相环进行对比仿真验证,性能对比图如8、9、10、11所示,可以看出采用本发明锁相环消除了在频率变化时二倍频分量对锁相环稳态结果的影响,同时本发明的锁相环具有更快速的动态响应时间。
[0080]
本发明的具体实施方式如下:
[0081]
对输入电压进行采样,并进行标幺处理。
[0082]
将标幺处理后的信号输入到正交信号产生模块1中。
[0083]
结合图4,正交信号产生模块1的具体实现流程如下:
[0084]
将输入的电网电压信号表示为:其中v
i
为电压幅值,ω
i
为信号角频率,为初相角,为信号相位,t为额定频率时信号的周期,
[0085]
输入信号v
i
经模块1.01输出信号v
β
,v
β
(t)表达式为:
[0086]
v
β
(t)=v
i cos(θ
i
‑
ω
i
t/4)
[0087]
=v
i cos(θ
i
)cos(ω
i
t/4) v
i sin(θ
i
)sin(ω
i
t/4)
[0088]
使用输入信号v
i
、信号v
β
、由相角估计模块3中的反馈信号δω
o
通过数学处理模块
1.02
‑
1.07产生信号v
c
,具体地
[0089][0090]
然后将信号v
i v
a
、v
c
作为正交信号产生模块1的输出。相角估计模块3
[0091]
将输入信号v
i
(t)和正交信号产生模块1的输出信号v
c
(t)一起输入到正交信号处理模块2中,结合图5,正交信号处理模块2的具体实施方式如下:
[0092]
图中,正交信号处理模块2由子模块2.01
‑
2.04组成。其中2.01为矩阵变换模块,具体地,该模块可以实现以下的数学功能。
[0093][0094]
2.02、2.03为三角函数计算模块,可以输出对应于输入的三角函数数值。2.04为加法器。
[0095]
将正交信号产生模块1的输出信号v
a v
c
输入到矩阵变换模块中进行变换得v
d
、v
q
。具体地,对v
c
(t)进行变换得v
d
(t)=v
c
(t)[cos(θ0) sin(θ0)],对v
i
(t)v
α
(t)进行变换得v
q
(t)=v
α
(t)[cos(θ0)
‑
sin(θ0)],其中θ0为相角估计模块3中输出的估计相角值。
[0096]
然后将信号v
d
、v
q
通过模块2.04相加,得正交信号处理模块2的输出值v
dq
。
[0097]
正交信号处理模块2使用相角估计模块3对正交信号处理模块2输出信号v
dq
(t)进行计算。结合图6相角估计模块3的具体实施方式如下:
[0098]
图6中,相角估计模块3由子模块3.01
‑
3.05组成。3.01为比例积分控制器的比例放大模块,3.02为比例积分控制器的积分模块,3.03、3.04为加法器,3.05为积分模块。
[0099]
正交信号处理模块2的输出信号v
dq
通过积分模块3.02生成角频率偏差估计值δω
o
。将工频ω
nf
与3.02输出得到模块3.03的输出信号,然后将模块3.03生成的信号与v
dq
经比例放大模块3.01计算后的结果通过加法器3.04和积分模块3.05进行计算,得到输入信号的相角估计值θ
o
。
[0100]
将θ
o
和δω
o
作为反馈量分别输入到正交信号产生模块1和正交信号处理模块2中。正交信号产生模块1正交信号处理模块2其中,为了使相角估计模块3可以在不同工程需求下运行,需要选择合适的k
p
、k
i
参数。使用建立小信号模型的方法建立锁相环的小信号模型来进行参数的选取。具体地,选择参数的具体实现流程如下:
[0101]
首先确定锁相环的小信号模型,令θ
i
=ω
nf
t δθ
i
、θ0=ω
nf
t δθ0并代入v
dq
(t),得:
[0102][0103]
对v
dq
(t)进行拉普拉斯变换,可得:
[0104][0105]
系统的闭环传递函数可写作:
[0106][0107]
根据劳斯稳定性判据可以得到以下的参数选择范围:
[0108][0109]
令其中ζ为阻尼系数、ω
n
为锁相环的工作带宽,根据不同的工程需求确定ζ和ω
n
,代入公式即可得到锁相环的k
p
、k
i
参数。
[0110]
以ω
n
=2π*20rad/s为例,即可以得到锁相环的k
p
、k
i
参数分别为:k
i
=40212.386 k
p
=553.08。
[0111]
结合图8、9、10、11,为采用本发明对传统基于延时单元的单相锁相环进行对比仿真验证。实验的输入电压信号在0.2s时刻相位阶跃提升30
°
,在0.4s时电压信号频率 2hz。图8为本发明锁相环(dq
‑
td
‑
pll)和含延时模块的锁相环td
‑
pll的性能对比图,图9为图8为0
‑
0.11s时刻的放大示意图。图10为0.18s
‑
0.32s时刻的放大示意图。图11为0.38s
‑
0.54s时刻的放大示意图。图9、10、11为放大后的图8。其中td
‑
pll的k
i
=15791、k
p
=177.7,dq
‑
td
‑
pll的k
i
=40212.386、k
p
=553.08。从放大示意图9中可以知道本文提出的锁相环从0时刻进入稳态状态时刻的时间显著提升,图10中可以知道本文提出的锁相环相较于传统锁相环在相位变化后进入稳态的时间显著缩短,图11中可以知道本文提出的锁相环相较于传统锁相环在频率变化后进入稳态时刻的波形更为平滑,且进入稳态的时间显著缩短。
[0112]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的方法及技术内容作出些许的更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。