一种基于micro led技术的前照灯系统及其控制方法
技术领域
1.本发明涉及汽车前照灯控制技术,尤其涉及一种基于micro led技术的前照灯系统及其控制方法。
背景技术:
2.据交管部门相关统计表明,夜间发生交通事故的几率要比白天多1.5倍,55%的交通事故都发生在夜间。这主要是由于夜间的光线差、照明习惯不良等因素使驾驶员的视觉机能特性发生变化造成行车不当,引发交通事故。因此,提高汽车夜间行驶的安全性,显得非常重要。据了解,为了解决汽车夜间行驶的安全问题,欧洲和日本的汽车oem、一级供应商和灯源科技供应商现在已经纷纷进入了adbadaptive driving beam新兴市场中。
3.但是,目前主流的adb车灯中,普遍像素偏低,即仅能实现最多小于100个分区以内的区域灯光控制,且无法投射图案或者文字警示符号。而目前最为先进的dlp像素大灯虽然可以投射图案或者文字警示符号,但由于亮度偏低,无法作为近光和远光使用。
技术实现要素:
4.为解决上述技术问题,本发明提供一种基于micro led技术的前照灯系统及其控制方法,可实现对汽车前照灯的智能和精准控制,根据adas模块发送的前方道路交通信息即前方车辆位置信息,在尽可能保持路面灯光的情况,关闭前方驾驶员位置部分的灯光,防止对前方车辆驾驶员产生眩目,提高了夜间驾驶的安全性,除了可起到防眩目的作用,还可在特殊路况下投射警示符号,以提醒本车驾驶员注意,提高驾驶安全性。
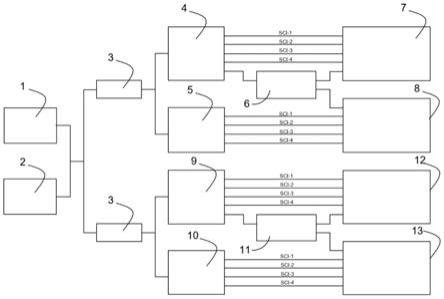
5.为了解决上述技术问题,本发明提供了如下的技术方案:一种基于microled技术的前照灯系统,包括车身控制模块、adas模块、can收发器、左-mcu微控制单元-1、左-mcu微控制单元-2、左-led驱动芯片、左-microled光源芯片-1、左-microled光源芯片-2、右-mcu微控制单元-1、右-mcu微控制单元-2、右-led驱动芯片、右-microled光源芯片-1、右-microled光源芯片-2;所述车身控制模块和adas模块分别通过can收发器与左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2信号连接,所述左-mcu微控制单元-1通过左-led驱动芯片分别为左-microled光源芯片-1和左-microled光源芯片-2供电,左-microled光源芯片-1通过sci接口与左-mcu微控制单元-1信号连接,所述左-microled光源芯片-2通过sci接口与左-mcu微控制单元-2信号连接,所述右-mcu微控制单元-1通过右-led驱动芯片分别为右-microled光源芯片-1和右-microled光源芯片-1供电,所述右-mcu微控制单元-1通过sci接口与右-microled光源芯片-1信号连接,所述右-mcu微控制单元-2通过sci接口与右-microled光源芯片-2和左-microled光源芯片-2设在单边灯具内,所述右-microled光源芯片-1和右-microled光源芯片-2设在另一侧单边灯具内。
6.作为优选,所述左-microled光源芯片-1和左-microled光源芯片-2的结构与右-microled光源芯片-1和右-microled光源芯片-2的结构相同,均采用上下排列且保持垂直
并处于同一中心线上,所述左-microled光源芯片-1和左-microled光源芯片-2的间距小于2毫米,所述右-microled光源芯片-1和右-microled光源芯片-2的间距小于2毫米。
7.作为优选,所述左-microled光源芯片-1和左-microled光源芯片-2的结构与右-microled光源芯片-1和右-microled光源芯片-2的上下光线角度均为-3.5
°
~3.5
°
,所述左-microled光源芯片-1和左-microled光源芯片-2的结构与右-microled光源芯片-1和右-microled光源芯片-2的左右展宽角度均为-5
°
~5
°
。
8.作为优选,所述左-microled光源芯片-1和左-microled光源芯片-2的结构与右-microled光源芯片-1和右-microled光源芯片-2均由倒梯形的三基色薄膜倒装micro-led芯片组成;每个micro-led芯片均为三基色薄膜倒装micro-led芯片,每个三基色薄膜倒装micro-led芯片包括薄膜倒装红光micro-led芯片、薄膜倒装绿/蓝光micro-led芯片。
9.作为优选,所述薄膜倒装红光micro-led芯片自下而上依次包括:gaas衬底、ingap刻蚀阻挡层、n-gaas接触层、n-algainp扩展层、n-alinp限制层、gainp/algainp红光多量子阱层、p-alinp限制层、p-algainp扩展层、p-gap层、红光micro-led芯片金属反射镜层、tiw/pt扩散阻挡层、n-/p-电极层;所述薄膜倒装绿/蓝光micro-led芯片自下而上依次包括:蓝宝石衬底、u-gan层、n-gan层、ingan/gan多量子阱层、p-algan电子阻挡层、p-gan层、绿/蓝光micro-led芯片金属反射镜层、tiw/pt扩散阻挡层、n-/p-电极层。
10.作为优选,所述薄膜倒装红光micro-led芯片和薄膜倒装绿/蓝光micro-led芯片中的红光micro-led芯片金属反射镜层、绿/蓝光micro-led芯片金属反射镜层的厚度共为50~10nm;所述薄膜倒装红光micro-led芯片和薄膜倒装绿/蓝光micro-led芯片中的tiw/pt扩散阻挡层的总厚度为10~80nm,所述tiw/pt扩散阻挡层采用tiw/pt/tiw/pt/tiw/pt堆叠结构,每个所述tiw层的厚度为300~200nm,每个所述pt层的厚度为10~100nm;所述tiw/pt扩散阻挡层将所述金属反射镜层的边界完全包裹,并超出边界20~50μm。
11.作为优选,所述can收发器为nxp公司的tja1042芯片。
12.作为优选,所述左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2均为瑞萨的rh850g4mh芯片。
13.为了解决上述技术问题,本发明提供了如下的技术方案:一种前照灯系统的控制方法,包括如下步骤:步骤一:由车身控制模块采集车身状态信号,由adas模块采集前方道路交通信息;
14.步骤二:车身控制模块和adas模块将上述信息通过can收发器分别与左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2通信;
15.步骤三:左-mcu微控制单元-1通过spi总线控制左-led驱动芯片分别为左-microled光源芯片-1和左-microled光源芯片-2供电,右-mcu微控制单元-1也通过spi总线控制右-led驱动芯片分别为右-microled光源芯片-1和右-microled光源芯片-2供电;
16.步骤四:左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2根据收到的车身控制模块和adas模块采集的信息通过sci接口发送对外控制信号;
17.步骤五:左-mcu微控制单元-1、左-mcu微控制单元-2通过sci接口控制左-microled光源芯片-1和左-microled光源芯片-2,右-mcu微控制单元-1和右-mcu微控制单元-2通过sci接口控制右-microled光源芯片-1和右-microled光源芯片-2。
18.本发明有益效果:本发明的基于micro led技术的前照灯系统及其控制方法与目前主流的adb车灯相比,既能实现>100个分区以上的区域灯光控制,又能投射图案或者文字警示符号。
19.与先进的dlp像素大灯相比,本发明所述前照灯的亮度远远高于dlp大灯,可作为远光和近光使用,此外,只会点亮需要的led像素点,而其他不激活,这与dlp大灯光源常亮的工作方式相比,更加节能和环保。
20.车身控制模块通过can总线,主要提供车身状态信号,如:车速信号、近光灯状态信号和环境光照度信息等,以满足不同工况下的智能车灯系统的开启和关闭需求。而adas模块通过can总线前方道路交通信息,即前方车辆位置信息,包括有前方车辆与本车的相对距离和相对位置等信息。在本发明所述的前照灯系统中,左右前照灯的mcu微控制单元-1通过spi总线控制1颗led驱动芯片给两颗micro led光源芯片供电。同时,每颗micro led光源芯片均由一颗mcu芯片通过4路sci接口进行led像素的亮灭控制和亮度调节。其中,如图2所示,每路sci总线负责一个象限,即256个led像素的亮灭及亮度调节。
21.为满足法规中关于远光中心亮度值emax的要求,贴装时芯片保持上下垂直且处于同一中心线,两颗光源芯片间距<2mm。通过外部透镜配光调整,使得单边灯具的上下两颗micro led光源芯片的光线可以均匀分布在如图3所示的,上下角度为-3.5
°
~3.5
°
,左右展宽角度为-5
°
~5
°
的矩形范围内。
附图说明
22.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
23.图1是本发明的基于micro led技术的前照灯系统的架构图
24.图2:本发明的micro led光源芯片接口示意图
25.图3:本发明的前照灯中micro led光源照射范围示意图;
26.图4:本发明的薄膜倒装红光micro-led芯片的结构示意图;
27.图5:本发明的薄膜倒装绿/蓝光micro-led芯片的结构示意图。
28.附图说明:1、车身控制模块;2、adas模块;3、can收发器;4、左-mcu微控制单元-1;5、左-mcu微控制单元-2;6、左-led驱动芯片;7、左-microled光源芯片-1;8、左-microled光源芯片-2;9、右-mcu微控制单元-1;10、右-mcu微控制单元-2;11、右-led驱动芯片;12、右-microled光源芯片-1;13、右-microled光源芯片-2;14、gaas衬底;15、ingap刻蚀阻挡层;16、n-gaas接触层;17、n-algainp扩展层;18、n-alinp限制层;19、gainp/algainp红光多量子阱层;20、p-alinp限制层;21、p-algainp扩展层;22、p-gap层;23、红光micro-led芯片金属反射镜层;24、tiw/pt扩散阻挡层;25、n-电极层;26、p-电极层;27、蓝宝石衬底;28、u-gan层;29、n-gan层;30、ingan/gan多量子阱层;31、p-algan电子阻挡层;32、p-gan层;33、绿/蓝光micro-led芯片金属反射镜层;34、tiw/pt扩散阻挡层;35、n-电极层;36、p-电极层。
具体实施方式
29.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
30.一种基于microled技术的前照灯系统,包括车身控制模块1、adas模块2、can收发器3、左-mcu微控制单元-14、左-mcu微控制单元-25、左-led驱动芯片6、左-microled光源芯片-17、左-microled光源芯片-28、右-mcu微控制单元-19、右-mcu微控制单元-210、右-led驱动芯片11、右-microled光源芯片-112、右-microled光源芯片-213;所述车身控制模块1和adas模块2分别通过can收发器3与左-mcu微控制单元-14、左-mcu微控制单元-25、右-mcu微控制单元-19和右-mcu微控制单元-210信号连接,所述左-mcu微控制单元-14通过左-led驱动芯片6分别为左-microled光源芯片-17和左-microled光源芯片-28供电,左-microled光源芯片-17通过sci接口与左-mcu微控制单元-14信号连接,所述左-microled光源芯片-28通过sci接口与左-mcu微控制单元-25信号连接,所述右-mcu微控制单元-19通过右-led驱动芯片11分别为右-microled光源芯片-112和右-microled光源芯片-112供电,所述右-mcu微控制单元-19通过sci接口与右-microled光源芯片-112信号连接,所述右-mcu微控制单元-210通过sci接口与右-microled光源芯片-213)信号连接,所述左-microled光源芯片-17和左-microled光源芯片-28设在单边灯具内,所述右-microled光源芯片-112和右-microled光源芯片-213设在另一侧单边灯具内;所述左-microled光源芯片-17和左-microled光源芯片-28的结构与右-microled光源芯片-112和右-microled光源芯片-213的结构相同,均采用上下排列且保持垂直并处于同一中心线上,所述左-microled光源芯片-17和左-microled光源芯片-28的间距小于2毫米,所述右-microled光源芯片-112和右-microled光源芯片-213的间距小于2毫米;所述左-microled光源芯片-17和左-microled光源芯片-28的结构与右-microled光源芯片-112和右-microled光源芯片-213的上下光线角度均为-3.5
°
~3.5
°
,所述左-microled光源芯片-17和左-microled光源芯片-28的结构与右-microled光源芯片-112和右-microled光源芯片-213的左右展宽角度均为-5
°
~5
°
;所述左-microled光源芯片-17和左-microled光源芯片-28的结构与右-microled光源芯片-112和右-microled光源芯片-213均由倒梯形的三基色薄膜倒装micro-led芯片组成;每个micro-led芯片均为三基色薄膜倒装micro-led芯片,每个三基色薄膜倒装micro-led芯片包括薄膜倒装红光micro-led芯片、薄膜倒装绿/蓝光micro-led芯片;所述薄膜倒装红光micro-led芯片自下而上依次包括:gaas衬底14、ingap刻蚀阻挡层15、n-gaas接触层16、n-algainp扩展层17、n-alinp限制层18、gainp/algainp红光多量子阱层19、p-alinp限制层20、p-algainp扩展层21、p-gap层22、红光micro-led芯片金属反射镜层23、tiw/pt扩散阻挡层24、n-/p-电极层25/26;所述薄膜倒装绿/蓝光micro-led芯片自下而上依次包括:蓝宝石衬底27、u-gan层28、n-gan层29、ingan/gan多量子阱层30、p-algan电子阻挡层31、p-gan层32、绿/蓝光micro-led芯片金属反射镜层33、tiw/pt扩散阻挡层34、n-/p-电极层35/36;所述薄膜倒装红光micro-led芯片和薄膜倒装绿/蓝光micro-led芯片中的红光micro-led芯片金属反射镜层23、绿/蓝光micro-led芯片金属反射镜层33的厚度共为50~10nm;所述薄膜倒装红光micro-led芯片和薄膜倒装绿/蓝光micro-led芯片中的tiw/pt扩散阻挡层34的总厚度为10~80nm,所述tiw/pt扩散阻挡层34采用tiw/pt/tiw/pt/tiw/pt堆叠结构,每个所述tiw层的厚度为300~200nm,每个所述pt层的厚度为10~100nm;所述tiw/pt扩散阻挡层34将所述金属反射镜层的边界完全包裹,并超出边界20~50μm。
31.所述can收发器3为nxp公司的tja1042芯片;所述左-mcu微控制单元-14、左-mcu微控制单元-25、右-mcu微控制单元-19和右-mcu微控制单元-210均为瑞萨的rh850g4mh芯片。
32.一种前照灯系统的控制方法,包括如下步骤:步骤一:由车身控制模块1采集车身状态信号,由adas模块2采集前方道路交通信息;
33.步骤二:车身控制模块1和adas模块2将上述信息通过can收发器3分别与左-mcu微控制单元-14、左-mcu微控制单元-25、右-mcu微控制单元-19和右-mcu微控制单元-210通信;
34.步骤三:左-mcu微控制单元-14通过spi总线控制左-led驱动芯片6分别为左-microled光源芯片-17和左-microled光源芯片-28供电,右-mcu微控制单元-19也通过spi总线控制右-led驱动芯片11分别为右-microled光源芯片-112和右-microled光源芯片-213供电;
35.步骤四:左-mcu微控制单元-14、左-mcu微控制单元-25、右-mcu微控制单元-19和右-mcu微控制单元-210根据收到的车身控制模块1和adas模块2采集的信息通过sci接口发送对外控制信号;
36.步骤五:左-mcu微控制单元-14、左-mcu微控制单元-25通过sci接口控制左-microled光源芯片-17和左-microled光源芯片-28,右-mcu微控制单元-19和右-mcu微控制单元-210通过sci接口控制右-microled光源芯片-112和右-microled光源芯片-213。
37.所述左-micro led光源芯片-1和左-micro led光源芯片-2设在单边灯具内,所述右-micro led光源芯片-1和右-micro led光源芯片-2设在另一侧单边灯具内。
38.adas模块采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的adas技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况;
39.由于芯片本身集成了高性能的图形处理和中央处理器、存储器控制器,通过硬件的方式实现实时的四路视频信息处理,避免了一般视频处理芯片进行大量实时视频信息处理时的性能瓶颈。
40.adas应用包括可视辅助和识别辅助。可视辅助给驾驶人员提供更为立体的广泛视角范围,减少视角盲区范围;识别辅助对后方或者侧面接近的目标进行检测,提醒驾驶人员变道的潜在危险,也可以做到停车后提示是否适合安全开车门。
41.随着汽车电子技术的发展,安全性、舒适性等方面的要求不断提高,车身电器在车上的应用越来越多,同时也带来了成本增加、故障率上升、布线复杂等问题。于是,需要设计功能强大的控制模块,实现这些离散的控制功能,对众多用电器进行控制,这就是车身控制模块bcm。
42.车身控制模块的功能包括:电动门窗控制、中控门锁控制、遥控防盗、灯光系统控制、电动后视镜加热控制、仪表背光调节、电源分配等。
43.bcm具有以下发展趋势:bcm控制对象更多;各电子设备的功能越来越多,各种功能都需要通过bcm来实现,使得bcm功能更加强大;各电子设备之间的信息共享越来越多,一个信息可同时供许多部件使用,要求bcm的数据通信功能越速来越强;单一集中式bcm很难完成越来越庞大的功能,使得总线式、网络化bcm成为发展趋势。
44.本发明通过车身控制模块和adas模块分别通过can收发器与左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2信号连接,可以实现
信号的高速处理功能和全面分析处理功能,并且对于左-led驱动芯片和右-led驱动芯片的驱动判定更加准确且更加稳定。
45.微控制单元(microcontroller unit;mcu),又称单片微型计算机(single chip microcomputer)或者单片机,是把中央处理器(central process unit;cpu)的频率与规格做适当缩减,并将内存(memory)、计数器(timer)、usb、a/d转换、uart、plc、dma等周边接口,甚至lcd驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。诸如手机、pc外围、遥控器,汽车电子、工业上的步进马达、机器手臂的控制等,都可见到mcu的身影。
46.左-mcu微控制单元-1和右-mcu微控制单元-1分别通过spi总线控制左-led驱动芯片和右-led驱动芯片。所述sci接口采用四路信号控制。所述can收发器为nxp公司的tja1042芯片。所述左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2均为瑞萨的rh850g4mh芯片。所述左-micro led光源芯片-1和左-micro led光源芯片-2的结构与右-micro led光源芯片-1和右-micro led光源芯片-2的结构相同,均采用上下垂直并处于同一中心线上,两电源芯片间距小于2毫米。穿过单边灯具内的上、下两颗micro led光源芯片的光线为上下角度为-3.5
°
~3.5
°
,左右展宽角度为-5
°
~5
°
的矩形范围内。
47.micro led技术,即led微缩化和矩阵化技术。指的是在一个芯片上集成的高密度微小尺寸的led阵列,如led显示屏每一个像素可定址、单独驱动点亮,可看成是户外led显示屏的微缩版,将像素点距离从毫米级降低至微米级。
48.而micro led display,则是底层用正常的cmos集成电路制造工艺制成led显示驱动电路,然后再用mocvd机在集成电路上制作led阵列,从而实现了微型显示屏,也就是所说的led显示屏的缩小版。
49.micro led优点表现的很明显,它继承了无机led的高效率、高亮度、高可靠度及反应时间快等特点,并且具自发光无需背光源的特性,更具节能、机构简易、体积小、薄型等优势。
50.除此之外,micro led还有一大特性就是解析度超高。因为超微小,表现的解析度特别高;而相比oled,其色彩更容易准确的调试,有更长的发光寿命和更高的亮度以及具有较佳的材料稳定性、寿命长、无影像烙印等优点。故为oled之后另一具轻薄及省电优势的显示技术,其与oled共通性在于亦需以tft背板驱动,所以tft技术等级为igzo、ltps、oxide。
51.一种如权利要求1所述的前照灯系统的控制方法,包括如下步骤:步骤一:由车身控制模块采集车身状态信号,由adas模块采集前方道路交通信息;
52.步骤二:车身控制模块和adas模块将上述信息通过can总线分别与左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2通信;
53.步骤三:左-mcu微控制单元-1通过spi总线控制左-led驱动芯片分别为左-micor led光源芯片-1和左-micor led光源芯片-2供电,右-mcu微控制单元-1也通过spi总线控制右-led驱动芯片分别为右-micor led光源芯片-1和右-micor led光源芯片-2供电;
54.步骤四:左-mcu微控制单元-1、左-mcu微控制单元-2、右-mcu微控制单元-1和右-mcu微控制单元-2根据收到的车身控制模块和adas模块采集的信息通过sci接口发送对外控制信号;
55.步骤五:左-mcu微控制单元-1、左-mcu微控制单元-2通过sci接口控制左-micor led光源芯片-1和左-micor led光源芯片-2,右-mcu微控制单元-1和右-mcu微控制单元-2通过sci接口控制右-micor led光源芯片-1和右-micor led光源芯片-2。
56.所述的micro led光源芯片为德国欧司朗公司设计和生产的产品,其在4平方毫米的面积上将led光源分成1024个小的led像素,每个像素可提供3lm的光通量。本发明所述的前照灯系统单灯采用两颗上述的micro led光源芯片,为满足法规中关于远光中心亮度值的要求,贴装时芯片保持上下垂直且处于同一中心线,两颗光源芯片间距<2mm。所述两颗micro led光源芯片由一颗led驱动芯片提供供电,同时每颗micro led光源芯片均由一颗mcu芯片通过4路sci接口进行led像素的亮灭控制和亮度调节。其中,如图2所示,每路sci总线负责一个象限,即256个led像素的亮灭及亮度调节。作为优选,mcu芯片选用瑞萨的rh850g4mh芯片,其可提供4路sci接口,主频最多可达400mhz,可完全满足设计需求。can收发器优选nxp公司的tja1042,成本更低且可靠性优良。
57.车身控制模块通过can总线,主要提供车身状态信号,如:车速信号、近光灯状态信号和环境光照度信息等,以满足不同工况下的智能车灯系统的开启和关闭需求。而adas模块通过can总线前方道路交通信息,即前方车辆位置信息,包括有前方车辆与本车的相对距离和相对位置等信息。在本发明所述的前照灯系统中,左右前照灯的mcu微控制单元-1通过spi总线控制1颗led驱动芯片给两颗micro led光源芯片供电。同时,每颗micro led光源芯片均由一颗mcu芯片通过4路sci接口进行led像素的亮灭控制和亮度调节。其中,如图2所示,每路sci总线负责一个象限,即256个led像素的亮灭及亮度调节。
58.为满足法规中关于远光中心亮度值emax的要求,贴装时芯片保持上下垂直且处于同一中心线,两颗光源芯片间距<2mm。通过外部透镜配光调整,使得单边灯具的上下两颗micro led光源芯片的光线可以均匀分布在如图3所示的,上下角度为-3.5
°
~3.5
°
,左右展宽角度为-5
°
~5
°
的矩形范围内。
59.以上为本发明较佳的实施方式,本发明所属领域的技术人员还能够对上述实施方式进行变更和修改,因此,本发明并不局限于上述的具体实施方式,凡是本领域技术人员在本发明的基础上所作的任何显而易见的改进、替换或变型均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。