极紫外光源中的目标提供控制装置和方法
1.相关申请的交叉引用
2.本技术要求于2019年2月26日提交的编号为62/810,673的美国申请的优先权,该申请通过引用整体并入本文。
技术领域
3.所公开的主题涉及一种用于调谐传输到激光产生等离子体极紫外光源的目标空间的目标的特性的装置和方法。
背景技术:
4.极紫外(euv)光例如是波长约为50nm或更短的电磁辐射(有时也称为软x射线),包括波长约为13nm的光,极紫外光可以用于光刻工艺以在例如硅晶片等衬底中产生极小特征。
5.用于产生euv光的方法包括但不一定限于将具有例如氙、锂或锡等元素的材料转换为等离子体状态的euv范围内的发射谱线。在通常称为激光产生等离子体(“lpp”)的一种这样的方法中,所需要的等离子体可以通过用可以称为驱动激光的放大光束照射例如以液滴、板、带、流或材料簇形式的目标材料来产生。对于该过程,等离子体通常在密封容器(例如,真空室)中产生,并且使用各种类型的量测设备进行监测。
技术实现要素:
6.在一些一般方面,一种用于极紫外(euv)光源的目标装置包括目标发生器、传感器模块和目标发生器控制器。目标发生器包括被配置为容纳在等离子体状态下时产生euv光的目标材料的容器和与容器流体连通的喷嘴结构。目标发生器在喷嘴结构中限定开口,该开口适合于释放从容器接收的目标材料。传感器模块被配置为:当目标材料沿着朝向目标空间的轨迹行进时,检测与从开口释放的目标材料相关的方面,并且从检测到的方面产生一维信号。目标发生器控制器与传感器模块和目标发生器通信。目标发生器控制器被配置为基于对一维信号的分析来修改目标材料的特性。
7.实现可以包括以下特征中的一个或多个。例如,喷嘴结构可以包括限定开口的毛细管,并且开口可以沿着毛细管的纵向方向延伸。目标发生器控制器可以包括被配置为扰动经过开口释放目标材料的速率的致动装置。致动装置可以包括被配置为向容器中的流体形式的目标材料施加压力的压电感应器,并且目标发生器控制器可以被配置为改变提供给压电感应器的信号以改变施加到流体目标材料的压力,从而引起目标材料经过开口被释放的速率被扰动。
8.目标发生器控制器可以包括:控制系统,被配置为基于对一维信号的分析生成驱动波形;和致动装置,其与控制系统通信并且与目标材料相互作用。致动装置可以被配置为根据来自控制系统的驱动波形来修改目标材料的特性。控制系统可以是可编程的并且被配置为生成周期性驱动波形。控制系统可以被配置为修改驱动波形的多个方面,包括修改以
下一项或多项:驱动波形的一个或多个频率和驱动波形的一个或多个相位。驱动波形被修改的速率可以为每秒约100
‑
500个不同波形。
9.传感器模块可以包括:一个或多个光电二极管,每个光电二极管的输出是与由检测到的光产生的电流相关的电压信号;光电晶体管;光敏电阻器;以及光电倍增管。
10.目标发生器控制器可以被配置为不与任何被配置为输出与所形成的目标相关的二维信号的检测模块通信。
11.独立于与目标发生器控制器的通信,传感器模块可以与光源控制器通信,光源控制器被配置为调节指向目标空间的辐射脉冲的一个或多个特性。
12.目标发生器控制器可以具有至少5mhz的采样速率。
13.传感器模块可以被配置为检测由目标材料与被引导以穿过轨迹的光幕之间的相互作用产生的光。传感器模块可以被配置为在仅由目标材料与光幕之间的相互作用触发时检测与目标材料相关的方面。
14.传感器模块可以被配置为在不依赖于图像处理和/或不依赖于触发信号的情况下检测与目标材料相关的方面。
15.目标发生器可以被配置为根据由目标发生器控制器提供的驱动波形释放目标材料。目标材料沿着轨迹行进,并且分离质量块形式的目标材料中的至少一些目标材料可以聚结以在目标空间处形成目标。
16.目标装置还可以包括诊断系统,其被配置为在目标材料进入目标空间之前与沿着轨迹行进的目标材料诊断性地相互作用。传感器模块可以被定位为检测与在目标材料和诊断系统之间的诊断性相互作用相关的、与目标材料相关的方面。诊断性相互作用可以发生在远离目标空间的诊断距离处,诊断距离小于由沿着轨迹行进的目标材料形成的相邻目标之间的间距的两倍、或是喷嘴结构的开口与目标空间之间的半程。
17.目标发生器控制器可以被配置为在基于对一维信号的分析而确定目标材料在目标空间处的属性的可接受范围内之后设置目标发生器的稳态特性。目标发生器控制器还可以与euv光源的控制装置通信,并且可以被配置为一旦目标发生器的稳态特性被设置就通知控制装置。
18.在其他一般方面,利用一种方法控制沿着朝向极紫外(euv)光源的腔室中的目标空间的轨迹行进的目标材料。该方法包括经过限定在喷嘴中的纵向开口发射目标材料,开口流体耦合到被配置为容纳目标材料的容器。目标材料在等离子体状态下时产生euv光。该方法包括当目标材料沿着轨迹朝向目标空间行进时检测与目标材料相关的方面。该方法包括从检测到的方面产生一维信号;分析一维信号;并且基于对一维信号的分析来修改所发射的目标材料的一个或多个特性。
19.实现可以包括以下特征中的一个或多个。例如,通过经过开口释放液体形式的目标材料,可以经过限定在喷嘴中的开口来发射目标材料。经过开口发射目标材料可以引起朝向目标空间行进的目标材料的一个或多个粒子在到达目标空间之前聚结成一个或多个目标。
20.可以通过修改与目标材料从喷嘴释放的矢量速度相关的参数来修改发射的目标材料的一个或多个特性。可以通过修改提供给与容器中的目标材料流体连通的致动装置的驱动波形来修改与目标材料从喷嘴释放的矢量速度相关的参数。可以通过在容器中的目标
材料中产生或扰动压力波来修改提供给与容器中的目标材料流体连通的致动装置的驱动波形。
21.可以通过以100
‑
500hz的速率修改一个或多个特性来修改发射的目标材料的一个或多个特性。
22.可以通过检测由目标材料与诊断探针之间的相互作用产生的光来检测与目标材料相关的方面。可以通过检测仅由目标材料与诊断探针之间的相互作用触发的光来检测与目标材料相关的方面。可以通过从检测到的光产生的电流产生电压信号来从检测到的光产生一维信号。
23.可以通过确定目标材料的一个或多个运动属性来分析一维信号。
24.可以通过独立于与二维信号相关的任何分析来修改一个或多个特性来修改发射的目标材料的一个或多个特性,该二维信号与目标材料相关。
25.可以独立于图像处理来检测与目标材料相关的方面。可以独立于与指向目标空间的辐射脉冲相关的触发信号来检测与目标材料相关的方面。
26.该方法还可以包括基于对一维信号的分析来确定目标材料的一个或多个特性是否在目标空间处的可接受范围内,并且当确定目标材料的一个或多个特性在目标空间处的可接受范围内时,通知euv光源的控制装置。该方法还可以包括将目标材料的一个或多个特性保持在可接受范围内。确定目标材料的一个或多个特性是否在目标空间处的可接受范围内可以包括确定目标材料在进入目标空间之前聚结成具有可接受形状的目标。
27.在其他一般方面,根据一种方法调谐用于极紫外(euv)光源的目标装置。该方法包括以调谐模式操作包括与容器流体连通的喷嘴的目标装置。调谐模式操作包括沿着朝向目标空间的轨迹从喷嘴释放目标材料,其中目标材料在等离子体状态下时产生euv光。调节操作模式包括调节从喷嘴释放的目标材料的状态,包括调节目标材料的一个或多个特性。被调节的目标材料的一个或多个特性包括以下一项或多项:目标材料在进入目标空间之前沿着轨迹聚结成目标的位置和时间中。调谐模式操作包括当目标材料沿着轨迹朝向目标空间行进时检测与目标材料相关的一个或多个方面。一个或多个方面是在多个不同调节状态下进行检测。该方法包括基于检测到的一个或多个方面来确定与目标材料相关联的一组稳态性能特性。该方法包括在确定与目标材料相关的一组稳态性能特性之后,然后基于一组稳态性能特性以稳态模式操作目标装置,并且向euv光源的控制装置通知目标装置以稳态模式操作。
28.实现可以包括以下特征中的一个或多个。例如,可以通过在目标材料聚结成目标之前检测与目标材料相关的一个或多个方面来在目标材料沿着轨迹朝向目标空间行进时检测与目标材料相关的一个或多个方面。
29.可以通过检测与由聚结的目标材料形成的目标相关的一个或多个方面来在目标材料沿着轨迹朝向目标空间行进时检测与目标材料相关的一个或多个方面。
30.可以通过以约100
‑
500hz的速率调节一个或多个特性来调节从喷嘴释放的目标材料的一个或多个特性。
附图说明
31.图1a是包括目标发生器的目标装置的框图,该目标发生器被配置为形成指向极紫
外(euv)光源的目标空间的目标流;
32.图1b是由目标发生器形成的射流的示例的示意图,该射流分裂成朝向目标空间行进的子目标和朝向目标空间行进的聚结目标;
33.图2是示出从图1a的目标发生器向目标空间行进的子目标的聚结阶段的示意图;
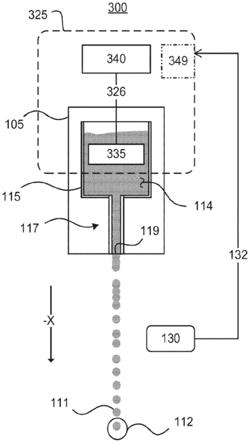
34.图3是图1a的目标装置的实现的框图;
35.图4是示出图1a或3的目标装置的致动装置的操作的实现的框图;
36.图5是图3的目标装置的控制系统的实现的框图;
37.图6a是图3的目标装置的致动装置的实现的示意图;
38.图6b是图3的目标装置的致动装置的实现的示意图;
39.图7是图1a或3的目标装置并入为输出装置提供euv光的极紫外(euv)光源的实现的框图;
40.图8a是示出目标与由图7的euv光源的诊断系统产生的一个或多个诊断探针之间的诊断性相互作用的实现的示意图;
41.图8b是示出目标与由图7的euv光源的诊断系统产生的一个或多个诊断探针之间的诊断性相互作用的实现的示意图;
42.图9是由图1a、3或7的目标装置执行的用于控制目标材料朝向目标空间移动的过程的流程图;
43.图10a
‑
10c是从图1a、3或7的目标装置的控制系统提供给致动装置的驱动波形的实现的图;
44.图11a是从图1a、3或7的目标装置的传感器模块产生的输出信号的图的示例,包括与产生输出信号的目标材料的诊断性相互作用的图示;
45.图11b是从图1a、3或7的目标装置的传感器模块产生的输出信号的图的示例,包括与包括产生输出信号的子目标的目标材料的诊断性相互作用的图示;
46.图11c示出了从图1a、3或7的目标装置的传感器模块产生的输出信号的图的几个示例,包括与产生输出信号的目标材料的诊断性相互作用的图示,图11c中的输出信号是响应于图10c的驱动波形而产生的;
47.图12是被提供给图1a、3或7的致动装置的所产生的驱动波形的频率分量的实现的示意图,并且示出了由驱动波形产生的目标材料;
48.图13是由图1a、3或7的目标装置执行的用于调谐在诸如图7的euv光源等euv光源中使用的目标装置的过程的流程图;以及
49.图14是从图7的euv光源接收euv光的输出装置的实现的框图。
具体实施方式
50.参考图1a,目标装置100包括目标发生器105,目标发生器105被配置为形成指向极紫外(euv)光源的目标空间112的目标111的流110。目标111由在等离子体状态下时产生euv光的目标材料114形成。目标空间112例如是目标111转换为等离子体状态的位置。
51.目标发生器105包括限定中空内部的容器115,该中空内部被配置为容纳目标材料114。目标发生器105包括喷嘴结构117,该喷嘴结构117具有与容器115的内部流体连通的开口(或孔口)119。容器115的内部可以保持在压力p,该压力大于开口119外部的压力。处于流
体状态的目标材料114在压力p(以及其他可能的力,诸如重力)下从容器115的内部流动并且流过开口119以形成流110。目标材料114和由目标材料114形成的目标111的轨迹通常沿着
‑
x方向延伸,尽管目标材料114和目标111的轨迹可能包括沿着垂直于
‑
x方向的平面的分量(即,y和z分量)。
52.目标材料114可以作为目标材料的射流或作为子目标的流而离开开口119。在euv光源的稳态操作期间,期望目标材料114在到达目标空间112时呈特具有定尺寸和几何形状的限定目标111的形式。例如,如图1b所示,目标材料114的射流121从开口119被释放,并且射流121最终分裂成朝向目标空间112行进的子目标122。导致射流121分裂成子目标122的现象称为rayleigh plateau不稳定性。在沿着轨迹并且在到达目标空间112之前有距离dc的位置处,这些子目标122聚结(组合在一起),以形成到达目标空间112的具有特定尺寸和几何形状或形状的更大的限定目标111。
53.目标材料的特性(包括子目标122聚结以形成目标111所在的位置dc、所形成的目标111的稳定性、以及所形成的目标111的尺寸和几何形状)可以通过控制与施加到目标材料114的压力p相关的方面来控制。子目标122聚结以形成目标111所在的位置dc、所形成的目标111的稳定性、以及所形成的目标111的尺寸和几何形状在目标装置100的调谐模式操作期间可以调节或控制,这种调谐模式发生在euv光源的稳态模式操作之前。在调谐模式完成之后,目标装置100可以通知euv光源并且开始在稳态操作(如果合适)下操作。这种调节和控制确保了在目标材料114到达目标空间112之前形成目标111并使其稳定,并且这样形成的目标111具有用于有效euv光产生的期望尺寸和几何形状。即使在稳态操作期间,目标装置100也可以继续调节和控制目标材料114的特性。
54.作为一个示例,目标材料的射流121最终分裂成子目标122,并且这可以自然发生(如上所述,这是rayleigh plateau不稳定性)。从开口119发出的射流121的自然分裂以特定产生速率产生子目标122,并且该产生速率至少部分与目标材料114经过开口119的平均(或均值(mean))矢量速度和开口119的横向范围(例如,直径)相关。射流121的这种自然分裂可以在不调制目标材料114的压力p的情况下发生,因为射流121本身是不稳定的、并且这种不稳定性开始于在射流121中存在几个微小扰动(噪声谱)。这些微小扰动总是至少部分由于例如喷嘴结构117与目标材料114之间的摩擦以及射流121中的热梯度而存在。噪声谱是宽带的,并且它包括很多不同频率成分。在一些情况下,受喷嘴结构117的几何形状和锡制成的目标材料114的影响,典型的自然分裂频率可以是约3兆赫(mhz)。目标装置100被配置为根据驱动波形(诸如下面参考图3讨论的驱动波形326)的各种参数来调制或调节压力p,从而允许更多地控制来自喷嘴结构117的射流121的分裂。通过以大于噪声谱中的扰动大小的幅度调制或调节压力p(在该处自然发生分裂),目标材料114在开口119处的出口矢量速度被调制,并且允许控制射流121的分裂参数。例如,对压力p的受控调制的幅度可以比噪声谱中的扰动的大小大至少一个量级。
55.为了实现对从开口119释放的目标材料114的特性的调节和控制,并且确保所有子目标材料122在到达目标空间112之前聚结成目标111,目标材料装置100包括目标发生器控制器125和传感器模块130,目标发生器控制器生成不同驱动波形以改变目标材料114从开口119的发射方式、并且还改变目标材料114在其沿着轨迹行进时的行为方式,传感器模块感测或检测实际目标材料114的行为对由目标发生器控制器125生成的不同驱动波形的响
应。
56.传感器模块130相对于流110定位。传感器模块130被配置为当目标材料114沿着朝向目标空间112的轨迹行进时检测与已经从开口119释放的目标材料114相关的一个或多个方面。因此,取决于目标材料114在何时何地分裂(由于rayleigh plateau不稳定性)并且随后沿着轨迹聚结,传感器模块130可以被配置为检测与射流121、子目标122和目标111中的一项或多项相关的方面。
57.目标发生器控制器125与目标发生器105和传感器模块130通信。在调谐模式操作期间(其中euv光源处于待机模式,并且不操作以产生euv光),目标发生器控制器125修改与目标发生器105如何操作相关联的参数,从而探测从开口119释放的目标材料114的特性(诸如子目标122聚结以形成目标111所在的位置dc、所形成的目标111的稳定性、以及所形成的目标111的尺寸和几何形状)。在这个探测期间(其中与目标发生器105相关联的参数被修改以修改目标材料的特性),目标发生器控制器125分析目标材料114的特性如何变化。目标发生器125分析来自传感器模块130的输出信号132,该输出信号被设置以检测在探测期间被修改的目标材料114的方面。目标发生器控制器125基于对该输出信号132的分析来调节(调谐)传输到目标空间112的目标材料114和/或目标111的特性。
58.来自传感器模块130的输出信号132可以在目标发生器控制器125处以至少5mhz(或至少20mhz)的速率(称为采样速率)被采样或接收。此外,目标发生器控制器125可以每秒(例如,100
‑
500hz)测量多个(例如,100
‑
500个)不同驱动波形之间的系统响应(即,目标材料114在其沿着轨迹行进时如何表现),其中每个设置跟踪50个周期的目标材料114(可以是目标111或预聚结的子目标122)。在该示例中,50
×
100hz=5000hz,这约是从输出二维信号的传统检测器中获取的信息的1000倍。以更高帧速率输出二维信号的更先进的检测器(诸如以高于5hz的帧速率输出的相机)可以具有更有限的感兴趣区域。因为目标材料114和子目标122往往比目标111更分散在更大区域上(例如,mm的量级),所以在这种二维传感器中更有限的感兴趣区域意味着目标材料114(诸如子目标122)的较小形成可以未被检测到。
59.此外,目标发生器控制器125可以确定与目标发生器105相关联的一组性能特性(称为“最佳模式性能特性”),其产生传输到目标空间112的目标111的最佳或改进的特性。例如,与目标发生器105相关联的最佳模式性能特性可以包括如下特性:减少(或消除)在到达目标空间112之前未能聚结成目标111的子目标122的数目。一旦最佳模式性能特性被确定,目标发生器控制器125可以将那些最佳模式性能特性锁定在适当位置并且操作目标发生器105以保持这种最佳模式性能特性,至少直到另外指示,或直到其他因素引起最佳或改进特性变化。这些最佳模式性能特性可以在稳态操作期间使用。
60.目标发生器控制器125可以快速执行该调谐,从而确保在调谐期间euv光源的停机时间尽可能短。目标发生器控制器125能够进行快速调谐,因为它依赖于来自传感器模块130的输出信号132,该输出信号132是一维信号,并且因为来自传感器模块130的输出信号132直接连接到目标发生器控制器125。一维信号是仅包含单个维度或方向上的信息的信号。因此,电压对时间或电流对时间的信号包含随时间变化的幅度(电压或电流)的信息。相比之下,二维信号包含二维信息。例如,图像是二维信号,因为它包含沿着平面中传感器的两个坐标的信息。
61.因此,控制回路短而直接。在各种实现中,目标发生器控制器125不与euv光源的其
他控制系统共享输出信号132。此外,目标发生器控制器125所需要的信号处理量减少了,这是因为一维信号(比诸如二维图像数据或视频数据等多维信号或数据更容易分析)是在控制回路中分析的主要或是唯一信息。例如,传感器模块130检测从开口119释放的目标材料的一维方面或特性。
62.作为示例,传感器模块130可以检测与目标材料相互作用的光的强度。在一些实现中,传感器模块130包括一个或多个光电二极管,每个光电二极管的输出是与从检测到的光产生的电流相关的电压信号。在其他实现中,传感器模块130可以包括一个或多个光电晶体管、光敏电阻器或光电倍增管,其中每个被配置为输出一维信号132以用于分析。传感器模块130配置有采样速率,该采样速率使得能够针对沿着朝向目标空间112的轨迹行进的目标材料114的每个实例来检测目标材料114的多方面。此外,传感器模块130被配置为检测小至5μm的目标材料114的实例的尺寸;这表示,即使是大小为5μm的粒子(诸如子目标122)也会出现在在传感器模块130处检测到的信号中。
63.此外,在各种实现中,目标发生器控制器125在不依赖于图像处理(或依赖于二维信号的任何处理)并且也不依赖于外部触发信号的情况下执行这种快速调谐。外部触发信号是由目标发生器控制器125分析的除输出信号132以外的信号。因此,目标发生器控制器125仅基于输出信号132中的信息来触发分析。
64.通常,到达目标空间112的目标111可以是近似球形的,具有约15
‑
40μm或约27μm的直径。此外,接近目标空间112的目标111的矢量速度可以在40
‑
180米(m)每秒(m/s)之间或高达500m/s。接近目标空间112的目标111之间的空间间隔可以在约1mm到3mm之间,并且在一些实现中为约1.4mm。目标111接近目标空间112的速率可以在几十千赫兹(khz)的量级,例如在20
‑
240khz、或20
‑
160khz、或20
‑
70khz之间。到达目标空间112的单个目标111可以由多个子目标122组成。例如,数十或数百个子目标122可以聚结以形成到达目标空间112的单个目标111。取决于根据目标111接近目标空间112的速度、目标111的尺寸以及施加到目标材料114的压力p,到达目标空间112的单个目标111可以由约50
‑
300个较小尺寸的子目标122组成。例如,为了使子目标122成功地聚结成目标111,约50khz的速率(在目标空间112处),其中每个目标111具有约30μm的直径,施加约28兆帕(mpa)的压力p,每个目标111由约100个聚结的子目标122形成。
65.在一些实现中,如图1b所示,喷嘴结构117包括毛细管118,毛细管118大致沿着纵向方向(即,平行于x方向)延伸并且限定开口119。开口119位于毛细管118的一端处。毛细管118可以由例如熔融石英、硼硅酸盐、铝硅酸盐或石英形式的玻璃制成。容器115中的目标材料114呈能够流动的形式。例如,在目标材料114包括在室温下为固体的金属(例如,锡)的实现中,将金属加热至金属熔点或以上的温度并且保持在该温度,使得目标材料呈液态。目标材料114流过毛细管118并且经过开口119被喷射。laplace压力是形成气体区域与液体区域之间边界的曲面的内部和外部之间的压力差。压力差是由液体与气体之间界面的表面张力引起的。当压力p大于laplace压力时,目标材料114作为连续射流121离开开口119。
66.作为一个示例,参考图2,由于rayleigh plateau不稳定性,较小尺寸的子目标122
‑
0可以由射流121形成。在该示例中,九个较小尺寸的子目标122
‑
0被示出为在时间t0沿着轨迹分散并且大体沿着
‑
x方向朝向目标空间112行进。在时间t0之后的时间点t1,由三个较小尺寸的子目标122
‑
0组成的组已经聚结为三个中间子目标122
‑
1,并且这样的聚结发生
在较小尺寸的子目标122
‑
0沿着轨迹移动(因此中间子目标122
‑
1沿着
‑
x方向比其相应较小尺寸的子目标122
‑
0更远)时。在时间t1之后的时间点t2,这三个中间子目标122
‑
1已经聚结为单个目标111。很多更小尺寸的子目标122
‑
0可以聚结为中间子目标122
‑
1而不仅仅是三个。此外,较小尺寸的子目标122
‑
0可以在单个事件中聚结(取代形成中间子目标122
‑
1)以形成目标111。传感器模块130相对于轨迹布置使得它可以在目标材料114沿着轨迹朝向间隔目标114行进时感测或检测与目标材料114相关的方面,因此传感器模块130可以检测与子目标的任何聚结阶段(包括聚结之前的阶段)或与目标111相关的方面。
67.参考图3,在一种实现中,目标装置300包括目标发生器控制器325。在这种实现中,目标发生器控制器325包括致动装置335,该致动装置335被配置为扰动目标材料114经过开口119被释放的速率。目标发生器控制器325包括与致动装置335通信的控制系统340。控制系统340被配置为向致动装置335提供驱动信号(例如,驱动波形326)以控制压力p如何施加到流体目标材料114。信号捕获设备349记录来自传感器模块130的一维输出信号132。信号捕获设备349准备输出信号132以供控制系统340使用。信号捕获设备349可以包括示波器或模数转换器,示波器或模数转换器从传感器模块130捕获一维输出信号132并且将其准备好供控制系统340使用。在其他实现中,信号捕获设备349可以与传感器模块130集成,使得来自传感器模块130的输出信号132已经准备好供控制系统340使用。
68.提供给致动装置335的驱动信号326是驱动波形326,驱动波形326在时间上是周期性的。控制系统340是可编程的,这表示,控制系统340被配置为被提供用于自动执行任务的编码指令,以生成用于致动装置335的驱动波形326。
69.目标发生器控制器325还可以包括其他处理组件,其可以是单独的组件或集成在控制系统340内。
70.控制系统340还可以改变提供给致动装置335以扰动或调制施加到目标材料114的压力p的驱动波形326的一个或多个属性,驱动波形326调制或改变目标材料114经过开口119被释放的速率。以这种方式,致动装置335被配置为根据来自控制系统340的驱动波形326修改从开口119输出的目标材料114的特性。
71.参考图4,框图示出了致动装置335如何影响经过开口119释放的目标材料114的变化。目标发生器控制器325的致动装置335根据来自控制系统340的驱动波形326在目标材料114的体积452中引起位移450。其中发生位移的体积452可以在容器115或喷嘴结构117之内。体积452的这种位移450响应于致动装置335的物理运动而发生,因为处于流体状态(诸如液体)的目标材料114是不可压缩的,致动装置335的物理运动可以是周期性的(根据周期性驱动波形326)并且因此位移450也可以是周期性的。体积452中的位移450在体积452中引起压力波454。压力波454是其中传播的扰动(周期性位移450)是目标材料114中的局部压力p
l
的变化的波。体积452的目标材料114中的压力波454引起离开喷嘴结构117的开口119的流体射流121的矢量速度的扰动456。流体射流121分裂成具有不同矢量速度的子目标122,并且这些矢量速度差异导致最终聚结458成目标111。
72.例如,提供给致动装置335的驱动波形326是包括不同频率的多个分量的电压信号,并且该电压信号被施加到致动装置335内的致动器436。响应于电压信号的施加,致动装置335内的致动器436以多个不同频率振动。
73.作为基本示例,驱动波形326可以至少包括与第一频率相关联的第一频率分量和
与第二频率相关联的第二频率分量。第一频率是比第二频率低的频率。以第二频率振动致动器436引起流体射流121分裂成期望尺寸和速度的相对较小的目标(子目标122)。第一频率用于调制流中子目标122的矢量速度并且促进子目标122之间的聚结,从而形成较大目标111,每个较大目标111由多个相对较小的子目标122形成。因此,目标111到达目标空间112的速率或频率对应于驱动波形326的第一频率。在任何给定的一组子目标122中,各个子目标122以不同矢量速度行进(参见图2)。具有较高矢量速度的子目标122可以与具有较低矢量速度的子目标122聚结以形成构成流110的更大聚结目标111。这些较大目标111与未聚结的子目标122彼此分开的距离更大。在聚结之后,流110中的目标111近似球形并且具有约10
‑
40μm的尺寸。
74.第二频率可以是兆赫兹(mhz)的量级。例如,第二频率可以接近rayleigh频率,该频率是导致rayleigh plateau不稳定性并且导致射流121分裂成子目标122的频率。第一频率(较低)可以是千赫兹(khz)量级(例如,20
‑
70khz或50khz)。第一频率可以用于调制子目标122沿着轨迹的矢量速度,也可以用于确定子目标122的产生速率。以远低于rayleigh频率的频率调制体积452中的压力导致形成子目标122的分组,每个分组包括不同矢量速度的子目标122,从而导致聚结。
75.在驱动波形326中可以使用两个以上的频率。引入调制信号的附加频谱分量允许更好地控制和更有效的聚结过程。通常这些附加频率是目标111的期望频率的高次谐波,并且在第一频率(khz范围内的频率)与第二频率(mhz范围内的频率)之间的范围内被选择。例如,驱动波形326可以由在相位和幅度上一致的几个特意选择的正弦波、或包含具有期望目标频率(“第一频率”)的高频谐波的周期性波形组成,例如,脉冲波、锯齿波或正弦波。
76.目标材料114(包括子目标122和目标111)由周期性驱动波形326控制,因此从传感器模块130输出的时间戳与驱动波形326匹配。来自传感器模块130的输出信号132包括与目标材料114的单独实例相对应的幅度峰值(在传感器模块130处检测到与目标材料114相关联的方面的时刻),例如,如图11a
‑
11c所示。输出信号132中每个峰值的持续时间是基于与由传感器模块130检测到的方面相关的特性来确定的。因此,如果传感器模块130检测到来自一个或多个诊断探针769与目标材料114之间的相互作用的诊断光(诸如诊断光770),则输出信号132中的每个峰值对应于这种相互作用,并且峰值的持续时间由目标材料114与诊断探针769相互作用的时长确定。在目标探针769是具有沿着x轴的范围的光束的一些实现中,该持续时间可以对应于约1μs。为了在输出信号132中具有足够的分辨率以能够准确检测目标材料114,传感器模块13的采样速率可以在几mhz的量级,例如,大于或等于约1mhz,大于或等于约10mhz,或大于或等于约20mhz。
77.参考图5,在一些实现中,控制系统340包括信号处理模块541,信号处理模块541被配置为从信号捕获设备349接收输出信号542,其中输出信号542是与由在传感器模块130的光检测器处检测到的光产生的电流相关的电压信号。通常,信号处理模块541分析来自信号捕获设备349的输出信号542。例如,信号处理模块541可以分析一组时间戳,这组时间戳对应于当目标材料114沿着轨迹朝向目标空间112行进时目标材料114与诊断光束相互作用的情况,可以确定输出信号542的幅度是否大于阈值,可以确定大于阈值的输出信号542的大小(诸如面积),和/或可以查看输出信号542跨越阈值的开始和结束时间,如下面参考图11a和11b讨论的。
78.信号处理模块541可以确定输出信号542是否稳定、以及是否以及何时发生聚结,并且可以确定在目标材料114沿着轨迹行进时目标材料114如何表现。信号处理模块541还知道提供给致动装置335的哪个驱动波形326导致当前分析的输出信号542。因此,信号处理模块541可以决定如何修改提供给致动装置335的驱动波形326以改善目标材料114的特性。例如,信号处理模块541可以确定如何修改驱动波形326的一个或多个相位和幅度。
79.控制系统340还包括与致动装置335通信的致动模块543。如果信号处理模块541确定需要对驱动波形326进行调节(基于分析),则它向致动模块543发送适当信号。致动模块543可以位于控制系统340之内(如图5所示),或者它可以集成在致动装置335之内。
80.控制系统340还可以包括或可以访问一个或多个可编程处理器544、以及有形地体现在机器可读存储设备中以供可编程处理器执行的一个或多个计算机程序产品545。一个或多个可编程处理器可以分别执行指令程序,以通过对输入数据进行操作并且生成适当输出来执行期望功能。通常,处理器从存储器546接收指令和数据。存储器546可以是只读存储器和/或随机存取存储器。适用于有形地体现计算机程序指令和数据的存储设备包括所有形式的非易失性存储器,例如包括半导体存储设备,诸如eprom、eeprom和闪存设备;磁盘,诸如内置硬盘和可移动磁盘;磁光盘;以及cd
‑
rom磁盘。任何上述内容都可以由专门设计的asic(专用集成电路)补充或并入在其中。
81.控制系统340内的模块(诸如信号处理模块541和致动模块543)可以分别包括它们自己的数字电子电路系统、计算机硬件、固件和软件以及专用存储器、输入和输出设备、可编程处理器和计算机程序产品。同样地,模块541、543中的任何一个或多个可以访问和使用存储器546、一个或多个输入设备547(诸如键盘、触摸屏、麦克风、鼠标、手持输入设备等)、一个或多个输出设备548(诸如扬声器和显示器)、一个或多个可编程处理器544和一个或多个计算机程序产品545。
82.虽然控制系统340被示出为单独的和完整的单元,但是其每个组件和模块均可以是单独的单元。此外,目标发生器控制器325(或控制系统340)可以包括其他组件,诸如专用存储器、输入/输出设备、处理器和计算机程序产品,图3和图5中未示出。例如,目标发生器控制器325还可以与euv光源接口。如上所述,在调谐模式完成之后,目标装置100(通过目标发生器控制器325)可以通知euv光源并且开始在稳态操作(如果合适)下操作。
83.致动装置335可以包括能够调制或扰动容器115中的目标材料114的压力p的任何合适的致动机构。在目标发生器控制器625a的一些实现中,如图6a所示,致动装置335是包括在腔体或空间616a中的致动器636a、并且经过膜637a机械耦合到目标材料114的致动装置。膜637a机械耦合到致动器636a并且还耦合到壁638a。壁638a在一侧部分地限定腔体616a并且部分地限定与容器115中的目标材料114流体耦合的辅流体室615a。辅流体室615a流体耦合到喷嘴结构117的开口119。膜637a位置的任何变化都会产生施加到辅流体室615a中的目标材料114的压力p的对应变化,并且这产生施加到流过喷嘴结构117并且从开口119流出的目标材料114的压力变化。致动器636a可以固定(诸如通过夹紧、胶合、焊接或铜焊)到容器115的壁或部分地限定腔体616a的侧壁。致动器636a可以被配置为沿着x轴膨胀或收缩以引起膜637a沿着x轴移动。致动器636a可以是能够改变膜637a的位置的任何合适机构。例如,致动器636a可以是压电致动器,压电致动器包括表现出逆压电效应的压电材料,使得压电材料在施加电场(从控制系统340)时伸长、弯曲、收缩、膨胀和/或以其他方式改变形
状。在致动器636a是压电致动器的实现中,致动器636a可以包括压电陶瓷材料,诸如锆钛酸铅(pzt)或其他类似材料。在一些实现中,致动器636a可以是单个压电致动器(例如,呈现逆压电效应的单个压电片或单层材料)、两个压电致动器、或多层压电组件。在一些实现中,致动器636a由直接沉积到膜637a上的单层压电材料形成。
84.在致动器636a是包括压电材料的压电致动器的实现中,压电材料可以具有任何合适的形状,并且这种形状可以取决于膜637a的形状。例如,压电材料可以是圆盘、正方形、矩形、圆柱、管或环的形状。在致动器636a是压电致动器的实现中,可以基于压电致动器如何安装在腔616a内来选择压电材料的配置。
85.虽然未示出,但可以将电极放置在压电材料附近以在压电材料上施加电场,并且电场的调制导致压电材料的机械调制。由电极生成的电场可以由来自控制系统340的信号控制。
86.在目标发生器控制器625b的其他实现中,如图6b所示,致动装置335包括与喷嘴结构117相互作用的致动器636b。例如,毛细管118的侧壁637b机械耦合到致动器636b。致动器636b可以是例如压电致动器,压电致动器响应于来自控制系统340的施加电压信号而膨胀和收缩,从而导致侧壁637b变形。通过使侧壁637b变形,在目标材料114中形成压力波,并且调制目标材料114的压力。致动器636b可以是具有容纳毛细管118的开口的环形,并且致动器636b可以固定或附接到侧壁637b。例如,致动器636b可以粘合到侧壁637b。
87.参考图7,目标装置700的实现被并入euv光源760中,该euv光源760将euv光778提供给输出装置780,该输出装置780可以是光刻设备。euv光源760包括限定目标空间112的真空室761。
88.euv光源760包括相对于目标空间112布置的euv光收集器762、产生指向目标空间112的一个或多个辐射脉冲767的光源763、相对于朝向目标空间112行进的目标材料114布置的诊断系统764、相对于朝向目标空间112行进的目标材料114布置的检测模块765、以及控制装置766,控制装置766与光源763、诊断系统764、检测模块765、输出装置780和传感器模块130通信。
89.通常,每个目标111均由目标材料114(其从目标装置700提供)构成,并且目标材料114在转换为等离子体时发射euv光768。每个目标111通过其与由光源763产生的辐射脉冲767的相互作用而至少部分或大部分转换为等离子体,这种相互作用发生在目标空间112中。每个目标111是包括目标材料114和诸如非目标颗粒等可选杂质的目标混合物。目标材料114是能够转换为具有在euv范围内的发射线的等离子体状态的物质。目标111可以是例如一滴液体或熔融金属、一部分液体流、固体颗粒或簇、包含在液滴内的固体颗粒、目标材料的泡沫、或包含在一部分液体流中的固体颗粒。目标材料114可以包括例如水、锡、锂、氙气、或在转换为等离子体状态时具有在euv范围内的发射谱线的任何材料。例如,目标材料114可以为锡元素,其可以用作纯锡(sn);用作锡化合物,诸如snbr4、snbr2、snh4;用作锡合金,诸如锡镓合金、锡铟合金、锡铟镓合金、或这些合金的任何组合。在没有杂质的情况下,每个目标111仅包括目标材料114。本文中提供的讨论是其中每个目标111是由诸如锡等熔融金属制成的液滴的示例。然而,每个目标111可以采取其他形式。
90.光源763产生通常沿着与x轴垂直的方向被引导到目标空间112的一束或多束辐射脉冲767。光源763包括产生一束或多束辐射脉冲767的一个或多个光源、包括改变辐射脉冲
束767的方向或角度的光学转向组件的光束传输系统、以及将辐射脉冲束767聚焦到目标空间112的聚焦组件。示例性光学转向组件包括光学元件,诸如透镜和反射镜,光学元件根据需要通过折射或反射来转向或引导辐射脉冲束767。光源763可以包括与控制装置766通信的致动系统,并且致动系统可以用于控制或移动各种特征光源763,包括光束传输系统、聚焦组件和光源。
91.光源763包括至少一种增益介质和激发增益介质以产生辐射脉冲束767的能量源。辐射脉冲束767构成在时间上彼此分开的多个光脉冲。在其他实现中,从光源763输出的光束可以是连续波(cw)光束。光源764可以是例如固态激光器(例如,1070nm和50w功率的nd:yag激光器、掺铒光纤(er:玻璃)激光器或掺钕yag(nd:yag)激光器))。
92.euv光收集器762收集从等离子体发射的尽可能多的euv光768,并且将该euv光768作为所收集的euv光778重定向到输出装置780。光收集器762可以是反射光学装置,诸如能够反射具有euv波长的光(即,euv光768)以形成所产生的euv光778的曲面镜。
93.诊断系统764相对于朝向目标空间112行进的目标材料114布置。诊断系统764被配置为产生一个或多个诊断探针769,该诊断探针769与在目标111进入目标空间112之前沿着轨迹行进的目标111诊断性地相互作用。在一些实现中,诊断系统764作为一个或多个诊断探针769产生一个或多个诊断光束。每个诊断光束被导向轨迹tr,使得当目标111穿过诊断光束时,产生诊断光770。在一些实现中,诊断光束具有在近红外区域中的中心波长。例如,所产生的诊断光770可以是从目标111反射、散射或穿过目标111的诊断光束的一部分。
94.还参考图8a,目标111与一个或多个诊断探针769之间的诊断性相互作用可以发生在远离目标空间112的诊断距离dp处。在调谐模式操作期间(也就是说,在euv光源760的稳态操作之前),诊断距离dp可以小于由沿着轨迹行进的目标材料114形成的相邻目标111之间的间距的两倍。例如,由于在前面的目标111p已经进入目标空间112期间或之后目标111与诊断探针769之间相互作用,传感器模块130可以检测到诊断光770。
95.在其他实现中,如图8b所示,目标材料114(其可以是子目标122和/或目标111)与一个或多个诊断探针769之间的诊断性相互作用可以更接近喷嘴结构117的开口119。例如,诊断距离dp位于喷嘴结构117的开口119与目标空间112之间的约半程处。在这些实现中,传感器模块130被布置为检测在距目标空间112的距离比图8a所示的相对更大的距离处产生的诊断光770。传感器模块130和诊断探针769的这种布置可以适合于在euv光源760的稳态操作期间使用。
96.在调谐期间(在euv光源760的稳态操作之前),如果子目标122聚结以形成目标111的位置dc减少到约或小于距目标空间112的诊断距离dp,则在子目标122与一个或多个诊断探针769之间可以发生诊断性相互所用。
97.在这种实现中,传感器模块130被配置为检测诊断光770,这是与目标材料114相关的一个方面。具体地,诊断光770是当目标材料114朝向目标空间112行进时由诊断探针769与目标材料114(其可以是子目标122或目标111的形式)之间的相互作用产生的。来自传感器模块130的输出信号132被提供给目标发生器控制器125,如上所述。此外,传感器模块130被配置为在仅被诊断灯770触发并且没有任何其他外部触发时检测诊断灯770。传感器模块130被配置为在不依赖于图像处理的情况下检测与目标材料114相关的方面(在该示例中是诊断灯770)。
98.根据诊断系统764和传感器模块130相对于目标空间112的布置,在euv光源760的稳态操作期间,来自传感器模块130的第二输出信号732
‑
2可以被提供(与提供给目标发生器控制器125独立地和分开地)给控制装置766以进行其他类型的处理。第二输出信号732
‑
2与输出信号132相同,除了它遵循与从传感器模块130到控制装置766的路径不同并且分开的路径。例如,控制装置766可以分析来自传感器模块130的第二输出信号732
‑
2以估计目标111的一个或多个属性(诸如到达、运动、速度(量值,speed)、矢量速度(velocity)和加速度)。控制装置766可以包括光源控制模块,光源控制模块被配置为确定如何调节光源763从而基于来自传感器模块130的输出来调节指向目标空间112的辐射脉冲767的一个或多个特性(诸如定时和方向)。
99.检测模块765相对于朝向目标空间112行进的目标材料114布置。检测模块765可以检测与目标材料114相关的二维方面,并且还输出与目标材料114相关的二维信号。来自检测模块765的输出信号771被发送到控制装置766。目标发生器控制器125在其分析中不使用来自检测模块765的输出信号771。因此,在各种实现中,目标发生器控制器125不与输出二维输出信号771的任何检测模块(诸如检测模块765)通信,并且不依赖于这样的二维输出信号。
100.目标发生器控制器125与控制装置766通信。因此,一旦在基于对一维输出信号132的分析而确定目标材料114在目标空间112处的可接受的性能范围内之后,目标发生器控制器125设置目标发生器105的稳态特性,目标发生器控制器125可以通知控制装置766,使得控制装置766可以在稳态模式下开始操作euv光源760以产生用于输出装置780的euv光778。
101.参考图9,由目标装置100执行过程980以控制目标材料114朝向目标空间112行进。在一些实现中,过程980在调谐模式操作期间并且在稳态模式操作中使用euv光源760之前执行。在调谐模式操作期间,euv光源760不产生供输出装置780使用的euv光778,并且目标装置100执行操作以确定与目标材料114相关联的一组稳态性能特性。
102.在其他实现中,当euv光源760在稳态模式下操作并且因此产生euv光778以供输出装置780使用时,执行过程980。在稳态模式操作期间,目标装置100执行操作以维持与目标材料114相关联的一组稳态性能特性。在这样的实现中,传感器模块130(和诊断系统764)可以定位为更靠近喷嘴结构117,以确保由目标发生器控制器125获取的信息在目标材料114到达目标空间112之前有足够的时间作用于目标材料114。
103.过程980包括经过限定在喷嘴结构117中的开口119发射目标材料114(981)。根据从控制系统340提供给致动装置335的驱动波形326,发射(981)目标材料114。驱动波形326的示例1026a和1026b分别在图10a和10b中示出。驱动波形326是作为时间的函数(以任意单位)提供给致动装置335的幅度(诸如电压)。驱动波形1026a包括第二频率的正弦波加上小于第二频率的第一频率的方波。驱动波形1026b包括第二频率的正弦波加上小于第二频率的第一频率的另一正弦波。
104.图10c示出了驱动波形326的一组示例1026c
‑
1、1026c
‑
2、1026c
‑
2、1026c
‑
4、1026c
‑
5。图10c所示的驱动波形1026c
‑
1、1026c
‑
2、1026c
‑
2、1026c
‑
4、1026c
‑
5中的每个包括具有第二频率的方波(第二频率分量)加上具有小于第二频率的第一频率的正弦波(第一频率分量)。特别地,第二频率约是第一频率的十倍。例如,第一频率可以是约50khz并且第二频率可以是约500khz。第一频率分量(正弦波)与第二频率分量(方波)之间的相位在每个
驱动波形1026c
‑
1、1026c
‑
2、1026c
‑
2、1026c
‑
4、1026c
‑
5中是变化的,并且这个相位变化影响子目标122相对于指向目标空间112的流中的目标111的位置。这种变化的影响在图11c中更清楚地示出。
105.再次参考图9,过程980包括检测与沿着轨迹朝向目标空间112行进的目标材料114相关的一个或多个方面(982),并且从检测到的方面产生一维信号(983)。传感器模块130被布置为检测与目标材料114相关的一个或多个方面。此外,如上所述,子目标122聚结以形成目标111的位置dc取决于提供给致动装置335的驱动波形326。因此,对于一些驱动波形326(或对于驱动波形326的某些频谱参数),传感器模块130检测与聚结的目标111相关的一个或多个方面。对于其他驱动波形326(或对于驱动波形326的某些频谱参数),传感器模块130检测与子目标122(其可以是子目标122
‑
0或122
‑
1、或没有完全聚结为目标111的任何子目标)相关的一个或多个方面。特别地,如果在调谐模式操作期间(在euv光源760的稳态操作之前)执行过程980,则驱动波形326以导致在可能值范围内调节聚结位置dc的方式被调节。然后,在调谐模式操作中,传感器模块130检测与子目标122和目标111相关的方面。
106.例如,传感器模块130可以检测在目标材料114朝向目标空间112行进时由于目标材料114(诸如子目标122或目标111)与一个或多个诊断探针769之间的相互作用而产生的诊断光770。来自传感器模块130的输出信号132是一维信号,诸如作为时间的函数的诊断光770的强度的量度。一维输出信号132的示例1132a、1132b分别在图11a和11b中示出。
107.输出信号1132a示出了当聚结目标与诊断探针769相互作用时从聚结目标111
‑
a1、111
‑
a2、111
‑
a3反射或散射的诊断光770的强度。在该示例中,输出信号1132a示出了在时间ta1、ta2和ta3处的三个峰值。时间ta1、ta2、ta3处的峰值分别对应于从聚结目标111
‑
a1、111
‑
a2、111
‑
a3反射的诊断光770的强度的增加。在该示例中,提供给致动装置335的驱动波形326被配置为确保子目标122在到达诊断探针769之前聚结(因此,dc大于dp)。
108.输出信号1132b示出了从聚结目标111
‑
b1、111
‑
b2、111
‑
b3以及从子目标122
‑
b4和122
‑
b5反射或散射的诊断光770的强度。输出信号1132b在时间tb2、tb2、tb3处表现出较大峰值,其对应于从相应聚结目标111
‑
b1、111
‑
b2、111
‑
b3反射的诊断光770的强度的增加。输出信号1132b在时间tb4和tb5处表现出较小峰值,其对应于分别从相应子目标122
‑
b4和122
‑
b5反射的诊断光770的强度的增加。时间tb4和tb5处的峰值具有比时间tb1、tb2、tb3处的峰值更小的强度,因为子目标122
‑
b4和122
‑
b5具有与诊断探针769相互作用的相对较小的表面积。
109.在其他实现中,参考图11c,从传感器模块130输出一组一维输出信号1132c
‑
1、1132c
‑
2、1132c
‑
3、1132c
‑
4、1132c
‑
5。在这些实现中,输出信号1132c
‑
1、1132c
‑
2、1132c
‑
3、1132c
‑
4、1132c
‑
5中的每个分别对应于如图10c所示的驱动波形1026c
‑
1、1026c
‑
2、1026c
‑
2、1026c
‑
4、1026c
‑
5。输出信号1132c
‑
1和1132c
‑
5显示具有第一幅度的一组峰值,第一幅度的每个峰值对应于完全聚结目标111(如流1110c1、5的示意图所示)。输出信号1132c
‑
2、1132c
‑
3、1132c
‑
4分别显示具有主幅度的一组峰值、和具有小于主幅度的辅幅度的一组峰值。具有主幅度的峰值对应于完全聚结目标111,而辅幅度的峰值对应于子目标122。此外,辅幅度的峰值的位置在各个输出信号1132c
‑
2、1132c
‑
3、1132c
‑
4中均移位,这表示子目标122的位置相对于目标111发生移位。例如,输出信号1132c
‑
2可以从流1110c2产生;输出信号1132c
‑
3可以从流1110c3产生;输出信号1132c
‑
4可以从流1110c4产生。
110.传感器模块130(或信号捕获设备349)将输出信号132发送到控制系统340,控制系统确定与输出信号132中的强度峰值相对应的时间戳的值。例如,控制系统340从输出信号1132a确定时间戳ta1、ta2、ta3或从输出信号1132b确定时间戳tb1
‑
tb5。
111.过程980包括分析一维信号(984)。输出信号132的形状与照射在传感器模块130的检测器上的诊断光770的量或强度相关。因此,控制系统340可以将输出信号132转换为与检测到的光的最大强度相对应的一组值。例如,控制系统340中的信号处理模块541可以对输出信号132的每个个体电压峰值进行数字时间戳添加。可以对每个最大强度的值进行数字时间戳添加,然后用于确定目标111的一个或多个移动特性。信号处理模块541可以选择时间戳的位置(诸如输出信号1132a中的时间戳ta1、ta2、ta3),以大致对应于相应峰值的中心位置。例如,在一些实现中,信号处理模块541可以被配置为对来自传感器模块130(可以是光电二极管)中的检测器的瞬态峰值信号进行低通滤波,信号处理模块541可以确定时间滤波后的信号的导数,并且使用导数的过零来估计峰值的中心位置,并且然后选择该位置作为时间戳(诸如时间戳ta1、ta2、ta3)。在其他实现中,信号处理模块541可以选择半最大值交叉点的中点位置作为每个时间戳的位置。瞬态峰值信号的形状可以根据目标111的形状而不同(例如,目标111在沿着它们的轨迹行进时可以经历形状振荡),因此,信号处理模块541可以对质心敏感但在某些实现中不是瞬态峰值信号的形状。
112.输出信号542的其他方面(诸如1132a和1132b)可以由信号处理模块541分析。参考图11a和11b,信号处理模块541可以确定输出信号1132a、1132b的幅度是否大于相应阈值vala、valb。如果输出信号1132a、1132b分别大于阈值vala、valb,则这是传感器模块130已经感测到目标材料114的指示。信号处理模块541可以确定分别具有大于阈值vala、valb的幅度的输出信号1132a、1132b的峰值的尺寸(诸如分别为面积ara、arb)。信号处理模块541可以查看输出信号1132a、1132b的峰值分别与阈值vala、valb相交的开始和结束时间(例如,sta、stb、enda、endb)。
113.控制系统340可以分析来自输出信号132的时间戳以确定沿着轨迹朝向目标空间112行进的目标材料114的特性。在稳态操作期间,被分析的信息可以用于确定目标111到达特定空间位置(诸如目标空间112内的区域)的时间,估计目标111的速度(量值,speed)、矢量速度(velocity)或加速度,或者估计目标111到达特定空间位置与另一目标到达该空间特定位置之间的时间间隔。
114.信号处理模块541还可以访问可以存储在存储器546中的与目标111或诊断系统764相关的其他数据。例如,存储器546可以存储与先前矢量速度相关的信息,该先前速度与目标111或先前目标相关联。如果诊断系统764被设计为双光束诊断系统,则存储器546可以存储与诊断探针之间的间距相关的信息,或者存储器546可以存储诊断探针769与每个目标111相互作用的位置。
115.信号处理模块541可以使用所确定的时间戳来确定目标111的速度(量值,speed)或矢量速度(velocity)。
116.信号处理模块541可以确定目标111将在目标空间112内的位置处的预测时间。信号处理模块541能够通过使用所估计的矢量速度和存储在存储器546中的其他信息来确定目标111到达目标空间112内的位置处的预测时间。
117.来自信号处理模块541的一个或多个输出可以被认为是控制信号、并且被引导到
与光源763接口的致动系统。来自信号处理模块541的控制信号提供引起致动系统(与光源763接口)调节光源763的方面从而调节以下一项或多项的指令:一个或多个辐射脉冲767的释放定时和辐射脉冲767行进的方向。
118.在调谐操作期间,被分析的信息可以用于确定输出信号132中的任何峰值是否对应于子目标122(或未完全聚结目标111)。例如,子目标122与相邻的其他子目标122或目标111之间的时间戳的差值应当小于两个相邻目标111之间的时间戳的差值。这从输出信号1132b中显而易见。因此,差值tb1
‑
tb2>tb1
‑
tb4。
119.作为一个示例,如图12所示,驱动波形326的某些形状和参数可以被配置为延迟子目标122的聚结。这样做的一种方法是在第一频率的聚结信号之上施加扰动,诸如正弦波(第三频率)1226p。通过改变这个扰动正弦波的参数,诸如扰动正弦波1226p的相位和幅度,可以改变聚结(延迟或加速),使得第三频率的扰动正弦波抵消第一频率的聚结信号。如果第三频率的扰动正弦波1226p具有足够幅度,则可以完全防止聚结,并且可以通过传感器模块130检测子目标122。例如,驱动波形326中的扰动正弦波可以定时,使得子目标122被发射以与压力波454的最大矢量速度梯度(由驱动波形326的扰动正弦波1226p而产生)一致。通过这样做,接近该大矢量速度梯度的子目标122不太可能朝向彼此移动(因为它们的矢量速度没有被驱动波形326中第一频率的聚结信号修改)并且因此它们在时间t1保持未聚结。所收集的关于子目标122的信息可以被信号处理模块541使用以优化或改进聚结。
120.过程980包括基于对一维信号的分析来修改从开口119发射的目标材料114的一个或多个特性(985)。因此,当在euv光源760以稳态模式操作的同时执行过程980时,则在该步骤中,控制系统340可以修改与提供给致动装置335的驱动波形326相关联的参数,并且通过进行这样的修改,从开口119发射的目标材料114的行为被修改,目标是保持与目标材料114相关联的一组稳态性能特性。当在调谐模式期间执行过程980时(euv光源760处于待机模式并且不在稳态模式下操作),则在982处,控制系统340修改与提供给致动装置335的驱动波形326相关联的参数(诸如波长或频率和相位)以探测与目标材料114相关的其他方面。对目标材料114的修改可以是改变目标材料114从开口119释放的矢量速度,诸如改变聚结发生的时间或地点。
121.参考图13,执行过程1390以调谐目标装置(诸如目标装置100或700)。在讨论过程1390时,参考图7的目标装置700。最初,目标装置700以调谐模式1390a操作,并且一旦调谐模式1390a完成,目标装置700开始以稳态模式1390b操作。
122.在调谐模式1390a期间,沿着轨迹朝向目标空间112从喷嘴结构117释放目标材料114(1391)。这在上面关于步骤981进行了讨论。接下来,调节目标材料114(从喷嘴结构117释放)的一个或多个特性(1392)。例如,可以在步骤1392调节由目标材料114构成的子目标122聚结成目标111的位置dc和时间。该调节可以在控制系统340的控制下发生,该控制系统340修改提供给致动装置335的驱动波形326(并且通过修改该驱动波形326,目标材料114的特性被修改)。
123.过程1390接下来包括在目标材料朝向目标空间112行进时检测与目标材料114相关的一个或多个方面(1393)。这在上面关于步骤982进行了讨论。特别地,因为在这个阶段调谐(1390a)目标装置700,所以该检测1393发生在多个不同调节状态(在1392设置)以确定与目标材料114(1394)相关联的一组稳态性能特性。
124.一旦与目标材料114相关联的稳态性能特性被确定(1394),则euv光源760可以开始在稳态模式下操作。因此,目标装置700向euv光源760通知目标装置700正在稳态模式下操作(1395)。例如,目标装置700(通过目标发生器控制器125)可以向控制装置766发送信号,使得控制装置766可以在稳态模式下开始操作euv光源760以为输出装置780产生euv光778。在稳态模式1390b下,目标装置700在稳态模式下操作(1396),并且持续询问是否已经请求调谐(1397)。如果操作者或一些外部命令请求调谐目标装置700(1397),则目标装置700可以向euv光源760通知(如果需要)稳态模式1390b将停止(1398)。
125.参考图14,示出了光刻设备780的实现1480。光刻设备1480用曝光光束b对衬底(可以称为晶片)w进行曝光。光刻设备1480包括多个反射光学元件r1、r2、r3、掩模m和狭缝s,所有这些都在外壳10中。外壳10是能够支撑反射光学元件r1、r1、r2、掩模m和狭缝s的壳体、罐或其他结构,并且还能够保持外壳10内的真空空间。
126.euv光778进入壳体10并且被光学元件r1通过狭缝s朝向掩模m反射。狭缝s部分地限定用于在光刻工艺中扫描衬底w的分布式光的形状。传输到衬底w的剂量或传输到衬底w的光子数取决于狭缝s的尺寸和扫描狭缝s的速度。
127.掩模m也可以被称为掩模版或图案化装置。掩模m包括表示将在衬底w上的光刻胶中形成的特征的空间图案。euv光778与掩模m相互作用。euv光778与掩模m之间的相互作用使得掩模m的图案被施加到euv光778上以形成曝光光束b。曝光光束b穿过狭缝s并且被光学元件r2和r3引导到衬底w。衬底w与曝光光束b之间的相互作用将掩模m的图案曝光到衬底w上,从而在衬底w处形成光刻胶特征。衬底w包括多个部分20(例如,管芯)。y
‑
z平面中的每个部分20的面积小于整个衬底w在y
‑
z平面中的面积。每个部分20可以被曝光束b曝光以包括掩模m的副本,使得每个部分20包括由掩模m上的图案指示的电子特征。
128.光刻设备1480可以包括与euv光源760的控制设备766通信的光刻控制系统30。
129.本发明的其他方面在以下编号的条款中陈述。
130.1.一种用于极紫外(euv)光源的目标装置,所述目标装置包括:
131.目标发生器,包括被配置为容纳在等离子体状态下时产生euv光的目标材料的容器和与所述容器流体连通的喷嘴结构,所述目标发生器在所述喷嘴结构中限定开口,所述开口适合于释放从所述容器接收的所述目标材料;
132.传感器模块,被配置为:
133.当目标材料沿着朝向目标空间的轨迹行进时,检测与从所述开口释放的所述目标材料相关的方面,以及
134.从检测到的方面产生一维信号;以及
135.目标发生器控制器,与所述传感器模块和所述目标发生器通信,所述目标发生器控制器被配置为基于对所述一维信号的分析来修改所述目标材料的特性。
136.2.根据条款1所述的目标装置,其中所述喷嘴结构包括限定所述开口的毛细管,并且所述开口沿着所述毛细管的纵向方向延伸。
137.3.根据条款2所述的目标装置,其中所述目标发生器控制器包括致动装置,所述致动装置被配置为扰动经过所述开口释放所述目标材料的速率。
138.4.根据条款3所述的目标装置,其中所述致动装置包括压电感应器,所述压电感应器被配置为向所述容器中的流体形式的目标材料施加压力,并且所述目标发生器控制器被
配置为改变提供给所述压电感应器的信号以改变施加到所述流体目标材料的压力,从而引起所述目标材料经过所述开口被释放的速率被扰动。
139.5.根据条款1所述的目标装置,其中所述目标发生器控制器包括:控制系统,被配置为基于对所述一维信号的所述分析生成驱动波形;和致动装置,所述致动装置与所述控制系统通信并且与所述目标材料相互作用,其中所述致动装置被配置为根据来自所述控制系统的所述驱动波形来修改所述目标材料的所述特性。
140.6.根据条款5所述的目标装置,其中所述控制系统是可编程的、并且被配置为生成周期性驱动波形。
141.7.根据条款5所述的目标装置,其中所述控制系统被配置为修改所述驱动波形的方面,包括修改以下一项或多项:所述驱动波形的一个或多个频率和所述驱动波形的一个或多个相位,并且所述驱动波形被修改的速率为每秒约100
‑
500个不同波形。
142.8.根据条款1所述的目标装置,其中所述传感器模块包括:
143.一个或多个光电二极管,每个光电二极管的输出是与由检测到的光产生的电流相关的电压信号;光电晶体管;光敏电阻器;以及光电倍增管。
144.9.根据条款1所述的目标装置,其中所述目标发生器控制器不与任何被配置为输出与所形成的目标相关的二维信号的检测模块通信。
145.10.根据条款1所述的目标装置,其中所述传感器模块独立于与所述目标发生器控制器的通信而与光源控制器通信,所述光源控制器被配置为:调节指向所述目标空间的辐射脉冲的一个或多个特性。
146.11.根据条款1所述的目标装置,其中所述目标发生器控制器具有至少5mhz的采样速率。
147.12.根据条款1所述的目标装置,其中所述传感器模块被配置为:检测由所述目标材料与被引导以穿过所述轨迹的光幕之间的相互作用产生的光。
148.13.根据条款12所述的目标装置,其中所述传感器模块被配置为:在仅由所述目标材料与所述光幕之间的所述相互作用触发时,检测与所述目标材料相关的方面。
149.14.根据条款1所述的目标装置,其中所述传感器模块被配置为:在不依赖于图像处理和/或不依赖于触发信号的情况下,检测与所述目标材料相关的方面。
150.15.根据条款1所述的目标装置,其中所述目标发生器被配置为:根据由所述目标发生器控制器提供的驱动波形释放目标材料,所述目标材料沿着所述轨迹行进,分离质量块形式的所述目标材料中的至少一些目标材料聚结以在所述目标空间处形成所述目标。
151.16.根据条款1所述的目标装置,还包括诊断系统,所述诊断系统被配置为:在目标材料进入所述目标空间之前,与沿着所述轨迹行进的所述目标材料诊断性地相互作用,其中所述传感器模块被定位为检测与在所述目标材料和所述诊断系统之间的诊断性相互作用相关的、与所述目标材料相关的方面。
152.17.根据条款16所述的目标装置,其中所述诊断性相互作用发生在远离所述目标空间的诊断距离处,所述诊断距离小于由沿着所述轨迹行进的所述目标材料形成的相邻目标之间的间距的两倍、或是所述喷嘴结构的所述开口与所述目标空间之间的半程。
153.18.根据条款1所述的目标装置,其中所述目标发生器控制器被配置为:在基于对所述一维信号的所述分析而确定所述目标材料在所述目标空间处的属性的可接受范围内
之后,设置所述目标发生器的稳态特性。
154.19.根据条款18所述的目标装置,其中所述目标发生器控制器还与所述euv光源的控制装置通信,并且被配置为:一旦所述目标发生器的所述稳态特性被设置,就通知所述控制装置。
155.20.一种控制沿着朝向极紫外(euv)光源的腔室中的目标空间的轨迹行进的目标材料的方法,所述方法包括:
156.经过限定在喷嘴中的纵向开口发射目标材料,所述开口流体耦合到被配置为容纳所述目标材料的容器,其中所述目标材料在等离子体状态下时产生euv光;
157.当所述目标材料沿着所述轨迹朝向所述目标空间行进时,检测与所述目标材料相关的方面;
158.从检测到的方面产生一维信号;
159.分析所述一维信号;以及
160.基于对所述一维信号的所述分析,来修改所发射的目标材料的一个或多个特性。
161.21.根据条款20所述的方法,其中经过限定在所述喷嘴中的所述开口发射目标材料包括:经过所述开口释放液体形式的目标材料。
162.22.根据条款21所述的方法,其中经过所述开口发射目标材料引起:朝向所述目标空间行进的目标材料的一个或多个粒子在到达所述目标空间之前聚结成一个或多个目标。
163.23.根据条款20所述的方法,其中修改所述发射的目标材料的一个或多个特性包括:修改与目标材料从所述喷嘴释放的矢量速度相关的参数。
164.24.根据条款23所述的方法,其中修改与所述目标材料从所述喷嘴释放的所述矢量速度相关的参数包括:修改提供给与所述容器中的所述目标材料流体连通的致动装置的驱动波形。
165.25.根据条款24所述的方法,其中修改提供给与所述容器中的所述目标材料流体连通的所述致动装置的所述驱动波形包括:在所述容器中的所述目标材料中产生压力波。
166.26.根据条款20所述的方法,其中修改所述发射的目标材料的所述一个或多个特性包括:以100
‑
500hz的速率修改所述一个或多个特性。
167.27.根据条款20所述的方法,其中检测与所述目标材料相关的所述方面包括:检测由所述目标材料与诊断探针之间的相互作用产生的光。
168.28.根据条款27所述的方法,其中检测与所述目标材料相关的所述方面包括:检测仅由所述目标材料与所述诊断探针之间的所述相互作用触发的光。
169.29.根据条款27所述的方法,其中从检测到的光产生所述一维信号包括:从所述检测到的光产生的电流来产生电压信号。
170.30.根据条款20所述的方法,其中分析所述一维信号包括确定所述目标材料的一个或多个运动属性。
171.31.根据条款20所述的方法,其中修改所述发射的目标材料的所述一个或多个特性包括:独立于与二维信号相关的任何分析来修改所述一个或多个特性,所述二维信号与所述目标材料相关。
172.32.根据条款20所述的方法,其中检测与所述目标材料相关的所述方面独立于图像处理。
173.33.根据条款20所述的方法,其中检测与所述目标材料相关的所述方面独立于与指向所述目标空间的辐射脉冲相关的触发信号。
174.34.根据条款20所述的方法,还包括:基于对所述一维信号的所述分析,来确定所述目标材料的一个或多个特性是否在所述目标空间处的可接受范围内,并且当确定所述目标材料的所述一个或多个特性在所述目标空间处的所述可接受范围内时,通知所述euv光源的控制装置。
175.35.根据条款34所述的方法,还包括将所述目标材料的所述一个或多个特性保持在所述可接受范围内。
176.36.根据条款34所述的方法,其中确定所述目标材料的一个或多个特性是否在所述目标空间处的可接受范围内包括:确定所述目标材料在进入所述目标空间之前聚结成具有可接受形状的目标。
177.37.一种调谐用于极紫外(euv)光源的目标装置的方法,所述方法包括:
178.以调谐模式操作包括与容器流体连通的喷嘴的所述目标装置,所述调谐模式操作包括:
179.沿着朝向所述目标空间的轨迹从所述喷嘴释放目标材料,其中所述目标材料在等离子体状态下时产生euv光;
180.调节从所述喷嘴释放的所述目标材料的状态,包括调节所述目标材料的一个或多个特性,包括调节以下一项或多项:目标材料在进入所述目标空间之前沿着所述轨迹聚结成目标的位置和时间;
181.38.根据条款37所述的方法,其中当所述目标材料沿着所述轨迹朝向所述目标空间行进时检测与所述目标材料相关的一个或多个方面包括:在所述目标材料聚结成目标之前检测与所述目标材料相关的一个或多个方面。
182.39.根据条款37所述的方法,其中当所述目标材料沿着所述轨迹朝向所述目标空间行进时检测与所述目标材料相关的一个或多个方面包括:检测与由聚结的目标材料形成的目标相关的一个或多个方面。
183.40.根据条款37所述的方法,其中调节从所述喷嘴释放的所述目标材料的一个或多个特性包括:以约100
‑
500hz的速率调节所述一个或多个特性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。