1.本发明涉及路灯智能控制技术领域,具体涉及基于人工智能的智慧城市照明路灯调节方法及系统。
背景技术:
2.路灯对于保证行人安全出行至关重要,是城市建设中不可或缺的部分,然而,有些道路上设置的路灯个数较少,路灯之间间距较大,不能够实现对整个路面的照明,导致行人对黑暗区域可能存在的危险因素不能够准确的判断,不利于行人的安全出行。
3.为了避免上述路灯间距大导致的不利于行人的安全出行的情况,现有的方法是在路灯间距较大的道路上新增路灯进行照明,但是增加路灯个数无疑会增大路灯占用道路区域面积和增加路灯安装成本;如何在不增设路灯的前提下改善设置路灯数量较少的道路的照明效果,进而提高行人出行的安全性,是路灯监管部门现在面临的主要问题之一。
技术实现要素:
4.为了解决上述问题,本发明提供了一种基于人工智能的智慧城市照明路灯调节方法及系统。
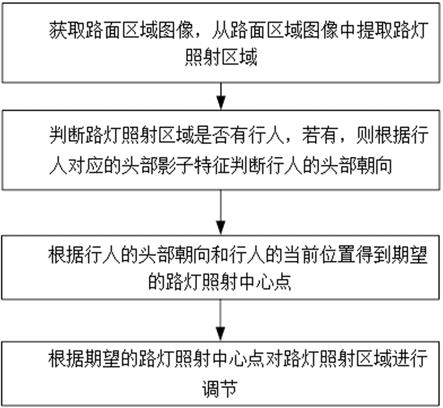
5.本发明的一种基于人工智能的智慧城市照明路灯调节方法的技术方案,包括如下步骤:获取路面区域图像,从路面区域图像中提取路灯照射区域;判断路灯照射区域是否有行人,若有,则根据行人对应的头部影子特征判断行人的头部朝向;根据行人的头部朝向和行人的当前位置得到期望的路灯照射中心点;根据期望的路灯照射中心点对路灯照射区域进行调节。
6.另外,本发明还提供了一种基于人工智能的智慧城市照明路灯调节系统的技术方案,包括存储器和处理器,所述处理器执行所述存储器存储的计算机程序,以实现上述的基于人工智能的智慧城市照明路灯调节方法。
7.本发明的上述调节方法和调节系统的有益效果是:本发明基于获取的路面区域图像提取路灯照射区域,当路灯照射区域有行人时,根据行人对应的头部影子特征判断行人的头部朝向,根据行人的头部朝向和行人的当前位置得到期望的路灯照射中心点,根据该期望的路灯照射中心点对路灯照射区域进行调节;行人的头部朝向可以反映行人的注意力方向,本发明根据行人的头部朝向来调整路灯的照射区域,使路灯的照射区域向行人的注意力方向调整,可以满足行人对注意力方向的照明需求,解决现有设置路灯数量较少的道路的照明效果不佳的问题,提高行人出行的安全性。
8.进一步地,所述行人对应的头部影子特征包括行人头部影子中头部分割线到头部左侧边缘线的垂直距离最大值以及头部分割线到头部右侧边缘线的垂直距离最大值
,所述根据行人对应的头部影子特征判断行人的头部朝向的方法包括:当行人位于路灯左侧时,计算行人当前的与之比,记为当前特征值
左
;判断当前特征值
左
与对应的参考特征值之间的大小关系,根据判断出的大小关系判断行人当前的头部朝向;当行人位于路灯右侧时,计算行人当前的与之比,记为当前特征值
右
;判断当前特征值
右
与对应的参考特征值之间的大小关系,根据判断出的大小关系判断行人当前的头部朝向。
9.进一步地,根据判断出的大小关系判断行人当前的头部朝向的方法包括:当行人位于路灯左侧时,若,则判定行人当前的头部朝向为正视前方;若时,则判定行人当前的头部朝向为向左,向左的角度与成正相关关系;当时,则判定行人当前的头部朝向为向右,向右的角度与成正相关关系;其中,为对应的参考特征值;当行人位于路灯右侧时,若,则判定行人当前的头部朝向为正视前方;若时,则判定行人当前的头部朝向为向右,向右的角度与成正相关关系;当时,则判定行人当前的头部朝向为向左,向左的角度与成正相关关系;其中,为对应的参考特征值。
10.进一步地,所述根据行人的头部朝向和行人的当前位置得到期望的路灯照射中心点的方法包括:以行人的当前位置为起点,沿行人当前的头部朝向的方向延伸设定距离,得到期望的路灯照射中心点。
11.进一步地,利用sa
‑
fastrcnn网络模型判断路灯区域是否有行人。
12.进一步地,所述从路面区域图像中提取路灯照射区域的方法包括:对路面区域图像进行hsi转换,得到路面区域各像素点对应的亮度值;根据路面区域各像素点对应的亮度值确定路灯照射区域。
附图说明
13.图1是本发明的基于人工智能的智慧城市照明路灯调节方法流程图;图2是本发明行人位于路灯左侧区域时的示意图;图3是本发明行人从正对路灯照射方向向左逐渐扭头时的头部影子特征变化示意
图。
具体实施方式
14.为使本发明实施例的目的、技术方案和优点更清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行介绍。
15.现有对路灯的调节方法较为简单,比如对路灯的开启和关闭时间进行调节,对路灯的亮度进行调节,根据人的行走轨迹对路灯照射角度进行调节等;但当道路上设置的路灯个数较少,路灯之间间距较大时会存在不能够对整个路面进行照明的情况,紧依靠上述现有对路灯的调节方法并不能够实现对行人感兴趣的黑暗区域的照明,导致行人对黑暗区域可能存在的危险因素不能够准确的判断,不利于行人的安全出行。
16.本发明旨在针对上述情况提供一种能够解决上述问题的路灯调节方法和系统,主要构思在于:根据行人头部在路面上的影子特征来判断行人的头部朝向,根据行人的头部朝向来调节路灯的照射区域。
17.基于人工智能的智慧城市照明路灯调节方法实施例如图1所示,本实施例的基于人工智能的智慧城市照明路灯调节方法包括以下步骤:1)获取路面区域图像,从路面区域图像中提取路灯照射区域;本实施例通过路灯上架设的红外枪球联动相机或者路灯附近架设的红外枪球联动相机来采集路灯区域图像。红外枪球联动相机兼具红外探测功能,基于架设红外枪球联动相机可以拍摄ir rgb图像,能够准确识别黑暗区域的行人。本实施例采用红外枪球联动相机,作为其它实施方式,可以采用其它类型的相机来采集路灯区域图像,只要基于采集的路灯区域图像能够准确提取出路面信息和路灯照射区域信息和行人相关信息即可。
18.由于路面多为水泥路或柏油路,容易存在颗粒状的噪声点,为了平衡图像间的差异,本实施例对采集的路灯区域图像进行预处理,具体为:通过中值滤波去除路灯区域图像中颗粒状分布的噪声点,保留了边缘信息和图像内部细节。中值滤波是一种非线性滤波器,通过滤波窗口内的邻域像素值的中值代替待处理的像素值。由于路面几乎为单一图像,所以本实施例只需通过固定3*3大小的滤波窗口即可实现较好的效果。
19.由于采集的路灯区域图像除了包括路面区域之外,还可能包括其它区域,比如排水沟区域等,因此本实施例对预处理之后的图像进行语义分割,获取路面的横向区域和纵向最大区域。语义分割的具体步骤为:将预处理后的图像作为待识别图像,对图像中的像素点进行标记,标记类别为:路面、排水沟和其他,对应标签分别为:1,2,0;将标记后的图像送入语义分割编码器,进行卷积池化,得到图像的特征图;通过语义分割解码器将特征图输出为语义分割图,损失函数采用交叉熵损失函数,最终实现图像分割,得到了路面区域和排水沟区域,由此获取了路面区域图像。
20.获取的路面区域图像为rgb图像,由于路灯照射区域与周围未照射区域对应的像素在亮度值上存在较大差异,本实施例将获取的路面区域rgb图像进行hsi颜色空间转换,以通过像素点亮度值的差异从路面区域图像中提取出路灯照射区域。转换后图像中像素的亮度值,r为对应像素点红色通道的值,g为对应像素点绿色通道的值,b为
对应像素点蓝色通道的值;将rgb图像转换为hsi图像为现有技术,此处不再赘述。
21.本实施例在得到路面区域图像中每个像素点的亮度值之后,根据相邻像素点之间亮度值的差异是否大于设定亮度阈值能够识别出路灯照射区域和周围未照射区域的边界,本实施例中设定亮度阈值为,由此就得到了灯光照射区域,亮度阈值的设定可以根据实际需要进行修改。识别路灯照射区域和周围未照射区域的边界的方法可采用图像边缘识别算法,图像边缘识别算法为现有技术,此处不再赘述。
22.2)判断路灯照射区域是否有行人,若有,则根据行人对应的头部影子特征判断行人的头部朝向;本实施例通过目标检测网络来检测行人的头部图像,常用的目标检测网络包括:fast rcnn和deepparts等。考虑到本实施例是通过广角相机采集图像,行人到相机的距离不同造成图像中行人的尺度大小也不同,本实施例利用sa
‑
fastrcnn网络模型来实现,网络模型通过设计两个分支网络分别实现对行人目标检测和尺度判断,将图像输入目标检测编码器,通过卷积池化进行特征提取,通过不同尺度的滑窗对特征图进行低维特征映射,将大小尺度的子网络合并,分别分配不同的权重,最终输入两个全连接网络进行分类和回归,最终得到不同尺度下行人的包围框。
23.在判断出路灯照射区域有行人后,利用边缘检测技术得到行人对应的影子轮廓,选择行人最远端的头部区域的凸峰点,与肩部阴影直线中心点进行连线,得到行人头部的分割线,计算行人头部的分割线到头部左右两侧边缘线的垂直距离最大值和,根据和的大小关系来判断行人的头部朝向。
24.如图2、3所示,当行人位于路灯左侧,且头部正对路灯照射方向时,行人头部的分割线到头部左右两侧边缘线的垂直距离最大值相等,即=;当行人从正对路灯照射方向向左扭头时,是一个灯光由照射在人的面部向照射在人头部侧面转换的过程,由于人头部侧面的宽度相对人的面部宽度相对较大(据研究,成年人头面部尺寸中的鼻尖点至枕后点距大于两耳外宽),人头部在路面上影子形状取决于人头部对灯光的遮挡,那么行人头部的分割线到头部左两侧边缘线的垂直距离最大值会逐渐减小,而行人头部的分割线到头部右两侧边缘线的垂直距离最大值会逐渐增大;而且,随着行人向左扭头幅度越大,上述减小和增大幅度会有所增加。同理,当行人从正对路灯照射方向向右扭头时,行人头部的分割线到头部左两侧边缘线的垂直距离最大值会逐渐增大,而行人头部的分割线到头部右两侧边缘线的垂直距离最大值会逐渐减小;而且,随着行人向右扭头幅度越大,上述减小和增大幅度会有所增加。
25.本实施例判断行人的头部朝向的具体判断方法为:当行人位于路灯左侧时,计算行人当前的与之比,记为,将与对
应的参考值进行比较,当时,判定行人当前的头部朝向为正视前方;当时,则判定行人当前的头部朝向为向左,向左的角度与成正相关关系;当时,则判定行人当前的头部朝向为向右,向右的角度与成正相关关系。
26.当行人位于路灯右侧区域时,计算行人当前的与之比,记为,将与对应的参考值进行比较,当时,则判定行人当前的头部朝向为正视前方;当时,则判定行人当前的头部朝向为向右,向右的角度与成正相关关系;当时,则判定行人当前的头部朝向为向左,向左的角度与成正相关关系。
27.本实施例的上述参考值和是通过之前行人沿着道路行走且正视前方时的头部影子特征得到的,行人所处位置不同正视前方时对应的头部影子特征不同,本实施例需要预先得到不同位置处行人正视前方时对应的头部影子特征并进行存储,当前行人在行走的过程中,可以通过行人的当前位置提取相同位置处的行人正视前方时对应的头部影子特征作为参考值进行比对即可。
28.行人头部偏转的角度的大小与行人当前的头部影子特征与参考值之间差值的大小成正相关关系,设定头部最大偏转角度为,头部偏转角度最大时对应的头部影子特征与参考值之间的差值最大为,那么当前行人实际的偏转角度为。作为其它实施方式,也可以事先建立各头部偏转角度与上述差值的一一对应关系,然后直接该对应关系确定当前行人的头部偏转角度。
29.3)根据行人的头部朝向和行人的当前位置得到期望的路灯照射中心点;通过上述步骤可以判断出行人的头部朝向,行人的头部朝向反映了行人的注意力方向,为了改善行人注意力方向上的照明效果,应当控制路灯的照射区域向行人的注意力方向转移。
30.为了准确地控制灯光的照射区域向行人的注意力方向转移,本实施例计算得到了期望的路灯照射中心点,即期望的路灯在路面上照射的最亮点,具体方法是:以行人的当前位置为起点,沿行人当前的头部朝向的方向延伸3米,得到期望的路灯照射中心点。作为其它实施方式,可以根据路面长度、路灯高度和亮度对延伸长度进行调整。
31.4)根据期望的路灯照射中心点对路灯照射区域进行调节。
32.通过上述步骤得到期望的路灯照射中心点之后,控制路灯照射中心点向期望的路灯照射中心点移动,直至路灯照射中心点为期望的路灯照射中心点,由此就实现了路灯照射区域向行人注意力方向的转移。
33.现有技术中已然存在多种可以调节照射范围的路灯,本实施例的重点在于对现有路灯的控制方法进行改进,具体是确定路灯需要照射的范围,也即确定期望的路灯照射中心点,而不在于对路灯结构上的改进,因此本实施例不再对路灯结构的进行赘述。
34.本实施例主要研究了路灯照射区域有1个行人时如何对路灯照射范围进行调节的内容,对于其它情况,当路灯照射区域没有行人时,本实施例不对路灯照射范围进行调整;或者当路灯照射区域内行人较多时,可以按照上述方法求得每个行人对应的期望的路灯照射中心点,然后再对各行人对应的期望的路灯照射中心点进行聚类,将聚类中心点作为最终的路灯照射中心点,然后再根据该最终的路灯照射中心点对路灯照射区域进行调节。
35.本实施例基于获取的路面区域图像提取路灯照射区域,当路灯照射区域有行人时,根据行人对应的头部影子特征判断行人的头部朝向,根据行人的头部朝向和行人的当前位置得到期望的路灯照射中心点,根据该期望的路灯照射中心点对路灯照射区域进行调节;行人的头部朝向可以反映行人的注意力方向,本实施例根据行人的头部朝向来调整路灯的照射区域,使路灯的照射区域向行人的注意力方向调整,可以满足行人对注意力方向的照明需求,解决现有设置路灯数量较少的道路的照明效果不佳的问题,提高行人出行的安全性。
36.基于人工智能的智慧城市照明路灯调节系统实施例本实施例的基于人工智能的智慧城市照明路灯调节系统包括存储器和处理器,所述处理器执行所述存储器存储的计算机程序,以实现如基于人工智能的智慧城市照明路灯调节方法实施例所描述的基于人工智能的智慧城市照明路灯调节方法。
37.由于基于人工智能的智慧城市照明路灯调节方法实施例中已经对基于人工智能的智慧城市照明路灯调节方法进行了说明,此处就不再赘述。
38.需要说明的是,尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。