1.本技术涉及液压控制技术领域,特别是涉及一种机器人液压控制系统和机器人设备。
背景技术:
2.随着我国高新技术的发展,机器人在生活生产中的应用越来越重要,液压泵是液压系统的动力元件,是靠发动机或电动机驱动,从液压油箱中吸入油液,形成压力油排出,送到执行部件的一种元件。目前大多数机器人利用液压泵并设置相应的液压控制管路对机器人的各个执行部件独立控制,实现机器人的动作。
3.传统的机器人液压系统包括控制模块、液压系统和手持终端,手持终端通过无线通信模块连接控制模块,发送驱动信号,控制模块根据驱动信号驱动液压系统的各油路中的控制阀,控制机器人的行走机构和升降机构完成动作。然而,当作业过程中控制模块出现故障时会导致液压系统无法工作,存在使用可靠性低的缺点。
技术实现要素:
4.基于此,有必要针对上述问题,提供一种可提高使用可靠性的机器人液压控制系统和机器人设备。
5.一种机器人液压控制系统,包括主控制器、液压控制装置、耐辐照电液控制装置、应急工况线路切换装置、第一类驱动装置和第二类驱动装置,所述主控制器连接所述液压控制装置和所述耐辐照电液控制装置,所述应急工况线路切换装置连接所述液压控制装置、所述耐辐照电液控制装置和所述第一类驱动装置,所述耐辐照电液控制装置连接所述第二类驱动装置;
6.所述主控制器用于发送控制指令至所述液压控制装置和所述耐辐照电液控制装置;所述液压控制装置用于根据接收的控制指令,通过所述应急工况线路切换装置对所述第一类驱动装置进行驱动控制;
7.所述耐辐照电液控制装置用于根据接收的控制指令,对所述第二类驱动装置进行驱动控制;所述耐辐照电液控制装置还用于在检测到所述主控制器和所述液压控制装置出现故障时,控制所述应急工况线路切换装置进行线路切换,以使所述第一类驱动装置通过所述应急工况线路切换装置与所述耐辐照电液控制装置连接。
8.在其中一个实施例中,机器人液压控制系统还包括数据采集装置,所述数据采集装置连接所述应急工况线路切换装置和所述耐辐照电液控制装置。
9.在其中一个实施例中,所述第一类驱动装置包括连接所述应急工况线路切换装置的运动油缸、夹持油缸和车体旋转液压模块;所述第二类驱动装置包括连接所述耐辐照电液控制装置的行走液压马达、液压支腿和液压动力站。
10.在其中一个实施例中,所述数据采集装置包括绝对编码器、压力传感器、夹持力传感器和增量编码器,所述绝对编码器设置于所述运动油缸和所述车体旋转液压模块,所述
压力传感器设置于所述运动油缸、所述夹持油缸、所述车体旋转液压模块和所述行走液压马达,所述夹持力传感器设置于所述夹持油缸,所述增量编码器设置于所述行走液压马达。
11.在其中一个实施例中,所述液压控制装置包括电液伺服轴控制器、电流放大器、高精度控制阀和高频率响应阀,所述电液伺服轴控制器连接所述电流放大器和所述高频率响应阀,所述电流放大器连接所述高精度控制阀,所述高精度控制阀连接所述运动油缸,所述高频率响应阀连接所述夹持油缸。
12.在其中一个实施例中,所述耐辐照电液控制装置包括耐辐照主控芯片、耐辐照辅控芯片、输入电路和输出电路,所述耐辐照主控芯片连接所述耐辐照辅控芯片、所述输出电路,所述耐辐照辅控芯片连接所述输入电路,所述输入电路连接数据采集装置,所述输出电路连接所述应急工况线路切换装置和所述第二类驱动装置。
13.在其中一个实施例中,所述耐辐照电液控制装置还包括电源电路和通信电路,所述电源电路连接所述耐辐照主控芯片和所述输出电路,所述通信电路连接所述耐辐照主控芯片。
14.在其中一个实施例中,所述电源电路包括电子电源模块和功率电源模块,所述电子电源模块连接所述耐辐照主控芯片,所述功率电源模块连接所述输出电路。
15.在其中一个实施例中,所述耐辐照电液控制装置还包括外部供电接口,所述外部供电接口连接所述电子电源模块和所述功率电源模块。
16.一种机器人设备,包括上述的机器人液压控制系统。
17.上述机器人液压控制系统和机器人设备,主控制器发送控制指令至液压控制装置和耐辐照电液控制装置;液压控制装置根据接收的控制指令,通过应急工况线路切换装置对第一类驱动装置进行驱动控制;耐辐照电液控制装置根据接收的控制指令,对第二类驱动装置进行驱动控制。耐辐照电液控制装置还在检测到主控制器和液压控制装置出现故障时,控制应急工况线路切换装置进行线路切换,以使第一类驱动装置通过应急工况线路切换装置与耐辐照电液控制装置连接。通过对液压控制进行冗余设计,使得机器人在主控制器和液压控制装置失效时,仍可正常工作或撤离现场,还能够实现在强辐射条件下的作业,有效提高了使用可靠性。
附图说明
18.图1为一实施例中机器人液压控制系统的结构框图;
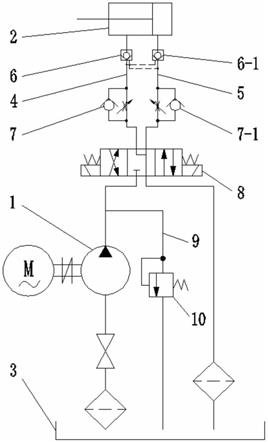
19.图2为一实施例中机器人液压控制系统的结构示意图;
20.图3为一实施例中耐辐照电液控制装置的结构示意图;
21.图4为一实施例中液压控制装置的结构示意图;
22.图5为另一实施例中液压控制装置的结构示意图图。
具体实施方式
23.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
24.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,
但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
25.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
26.在一个实施例中,提供了一种机器人液压控制系统,机器人具体可以是双臂搬运机器人,如核应急搬运机器人等。如图1所示,机器人液压控制系统包括主控制器100、液压控制装置200、耐辐照电液控制装置300、应急工况线路切换装置400、第一类驱动装置500和第二类驱动装置600,主控制器100连接液压控制装置200和耐辐照电液控制装置300,应急工况线路切换装置400连接液压控制装置200、耐辐照电液控制装置300和第一类驱动装置500,耐辐照电液控制装置300连接第二类驱动装置600。
27.主控制器100用于发送控制指令至液压控制装置200和耐辐照电液控制装置300;液压控制装置200用于根据接收的控制指令,通过应急工况线路切换装置400对第一类驱动装置500进行驱动控制;耐辐照电液控制装置300用于根据接收的控制指令,对第二类驱动装置600进行驱动控制;耐辐照电液控制装置300还用于在检测到主控制器100和液压控制装置200出现故障时,控制应急工况线路切换装置400进行线路切换,以使第一类驱动装置500通过应急工况线路切换装置400与耐辐照电液控制装置300连接。
28.其中,液压控制装置200可采用高精度液压控制装置。通过配备耐辐照电液控制装置300,使该液压控制系统具备强辐射环境下的控制功能。而且,通过配备应急工况线路切换装置400,使得机器人能够在高精度控制与高耐辐照控制两种特性下切换。第一类驱动装置500和第二类驱动装置600的具体结构和功能并不唯一,第一类驱动装置500可以是控制大臂、小臂及车体旋转模块的位置、夹持力和旋转角度,第二类驱动装置600可以是完成行走液压马达、液压支腿及液压动力站的控制。
29.具体地,在正常工况下,应急工况线路切换装置400连通液压控制装置200和第一类驱动装置500。主控制器100分别发送指令给液压控制装置200及耐辐照电液控制装置300,液压控制装置200对应控制第一类驱动装置500,耐辐照电液控制装置300对应控制第二类驱动装置600。
30.当发生紧急工况,主控制器100及液压控制装置200会因事故环境下的强辐射失效,无法对机械臂及车体旋转进行有效控制,耐辐照电液控制装置200可通过主控制器100及液压控制装置200发出的心跳信号来判断主控制器100和液压控制装置200是否失效,确认失效后,耐辐照电液控制装置300发出指令到应急工况线路切换装置400,将多路阀的电磁铁接线切换到耐辐照电液控制装置300上,由耐辐照电液控制装置300接管所有液压系统。
31.在一个实施例中,机器人液压控制系统还包括数据采集装置,数据采集装置连接应急工况线路切换装置400和耐辐照电液控制装置300。数据采集装置的类型也不是唯一的,可包括压力传感器、夹持力传感器、六维腕力传感器、绝对编码器和增量编码器等,数据
采集装置设置在第一类驱动装置500和第二类驱动装置600的相应器件上,采集相关数据上传至液压控制装置200和耐辐照电液控制装置300,液压控制装置200和耐辐照电液控制装置300可根据接收的参数对机器人进行相应控制。可以理解,当耐辐照电液控制装置300接管所有液压系统后,则通过耐辐照电液控制装置300接收数据采集装置上传的所有参数,并根据参数对第一类驱动装置500和第二类驱动装置600进行驱动控制。
32.上述机器人液压控制系统,通过对液压控制进行冗余设计,使得机器人在主控制器100和液压控制装置200失效时,仍可正常工作或撤离现场,还能够实现在强辐射条件下的作业,有效提高了使用可靠性。
33.在一个实施例中,第一类驱动装置500包括连接应急工况线路切换装置400的运动油缸、夹持油缸和车体旋转液压模块;第二类驱动装置600包括连接耐辐照电液控制装置300的行走液压马达、液压支腿和液压动力站。具体地,如图2所示,运动油缸可包括大臂运动油缸和小臂运动油缸,夹持油缸可包括大臂夹持油缸和小臂夹持油缸。以正常工况下为例,液压控制系统控制搬运机器人的双机械臂、车体、液压支腿以及左右行走马达,其中,液压支腿及行走马达由耐辐照电液控制装置300负责控制,大臂、小臂、车体旋转控制回路由液压控制装置200负责控制。结合采集的参数对运动油缸、夹持油缸、车体旋转液压模块、行走液压马达、液压支腿和液压动力站进行高精度闭环控制,以保证最终的位置控制及力控制精度。
34.对应地,在一个实施例中,数据采集装置包括绝对编码器、压力传感器、夹持力传感器和增量编码器,绝对编码器设置于运动油缸和车体旋转液压模块,压力传感器设置于运动油缸、夹持油缸、车体旋转液压模块和行走液压马达,夹持力传感器设置于夹持油缸,增量编码器设置于行走液压马达。其中,设置在大臂运动油缸、小臂运动油缸和车体旋转液压模块的绝对编码器与应急工况线路切换装置400连接,设置在大臂夹持油缸和小臂夹持油缸的夹持力传感器与应急工况线路切换装置400连接。设置在大臂运动油缸、小臂运动油缸、大臂夹持油缸、小臂夹持油缸、车体旋转液压模块的压力传感器与应急工况线路切换装置400连接,设置在行走液压马达的压力传感器与耐辐照电液控制装置300连接。设置在行走液压马达的增量编码器与耐辐照电液控制装置300连接。
35.耐辐照电液控制装置300采用抗辐照芯片,整体具有较强的耐辐照能力,其屏蔽外壳一般采用铝合金,特殊情况下可采用其他材质(如不锈钢、铅、钨合金等),以实现更高指标的耐辐射性能。在一个实施例中,如图3所示,耐辐照电液控制装置300包括耐辐照主控芯片、耐辐照辅控芯片、输入电路和输出电路,耐辐照主控芯片连接耐辐照辅控芯片、输出电路和输入电路,输入电路连接数据采集装置,输出电路连接应急工况线路切换装置400和第二类驱动装置600。
36.其中,输入电路包括增量编码器接口电路、频率测量接口电路、多路电压输入电路和多路开关信号输入电路,输入电路还可包括电流输入电路和温度输入电路。此外,耐辐照辅控芯片也连接部分开关信号输入电路。输出电路可包括功率输出电路和信号输出电路,功率输出电路包括pwm高侧比例电磁铁输出电路、pwm低侧比例电磁铁输出电路、开关功率输出电路和模拟功率输出电路,信号输出电路可包括开关信号输出电路和模拟信号输出电路。
37.耐辐照电液控制装置300重点关注比例电磁铁的可编程控制模块(即pwm功率输出
模块),用于对机械设备的液压元件进行开环或闭环控制,其中闭环控制可采用软件pid来实现,使电磁铁实现最小滞后,不受电压和温度的影响,但硬件需配备相应的电流检测电路及编码器读取接口电路。
38.在一个实施例中,耐辐照电液控制装置300还包括电源电路和通信电路,电源电路连接耐辐照主控芯片和输出电路,通信电路连接耐辐照主控芯片。
39.其中,耐辐照主控芯片通过通信电路连接外部装置,例如与主控制器100进行连接,还可以是与其他终端设备连接。具体地,通信电路可包括连接耐辐照主控芯片的can通信模块、rs232通信模块、tcp/ip及udp通信模块。此外,通信电路还包括连接耐辐照辅控芯片的can通信模块和rs232通信模块。
40.在一个实施例中,电源电路包括电子电源模块和功率电源模块,电子电源模块连接耐辐照主控芯片,功率电源模块连接输出电路,具体连接功率输出电路。电子电源模块用作接入电源给内部芯片供电,功率电源模块用作接入电源给功率输出电路供电。
41.进一步地,在一个实施例中,耐辐照电液控制装置300还包括外部供电接口,外部供电接口连接电子电源模块和功率电源模块。具体地,外部供电接口可包括对外供电模块1、对外供电模块2、对外供电模块3和对外供电模块4,功率电源模块连接对外供电模块1,电子电源模块连接对外供电模块2、对外供电模块3和对外供电模块4。对外供电模块1通过24v接口对外部模块供电,对外供电模块2、对外供电模块3和对外供电模块4分别通过10v、5v、3.3v接口对外部传感器供电。
42.此外,耐辐照电液控制装置300的各器件还通过耐辐照连接器与相应外部模块连接,进一步提高耐辐照电液控制装置300的耐辐照能力。
43.液压控制装置200的具体结构也并不唯一,在一个实施例中,液压控制装置200包括电液伺服轴控制器、电流放大器、高精度控制阀和高频率响应阀,电液伺服轴控制器连接电流放大器和高频率响应阀,电流放大器连接高精度控制阀,高精度控制阀连接运动油缸,高频率响应阀连接夹持油缸。
44.具体地,如图4所示,对于位置控制油缸,采用高精度编码器 油缸压力传感器 电液数字伺服轴控制器 电流放大器 高精度多路阀的闭环位置控制方案;如图5所示,对于夹持力控制油缸,采用夹持力传感器 油缸压力传感器 电液数字伺服轴控制器 高频率响应阀的闭环夹持力控制方案。
45.在一个实施例中,还提供了一种机器人设备,包括上述的机器人液压控制系统,机器人设备可以是核应急双臂搬运机器人等。
46.上述机器人设备,通过对液压控制进行冗余设计,使得机器人在主控制器100和液压控制装置200失效时,仍可正常工作或撤离现场,还能够实现在强辐射条件下的作业,有效提高了使用可靠性。
47.为便于更好地理解上述机器人液压控制系统和机器人设备,下面结合具体实施例进行详细解释说明。
48.双臂搬运机器人主要应用于核电作业现场的大负载搬运需求,如应急道路障碍清除、放射性固体废物的收集转运及储存搬运。其中由于搬运对象的多样性,部分搬运对象要求双臂能协同高精度抓取(如长管道等),部分搬运对象对搬运过程中的夹持力比较敏感(如装有废液的金属存储容器等),其要求搬运过程中既要能稳固地夹持物体不掉落,又要
确保夹持力不对特殊物体造成二次损坏等,因此要求双臂机器人的工作装置能实现高精度的位置控制以及末端夹持的精确力控制;此外,由于其工作环境的特殊性,机器人的液压控制系统还需要具备高耐辐照的特性。
49.与一般的工程机械不同,核应急搬运机器人需要在强辐射环境下完成高精度的搬运作业,因此该机器人的液压及液压控制系统应在以下两个方面有要求:
50.(1)运动控制方面:机械臂的运动油缸要能够实现高精度的位置控制,单轴控制精度≤1mm,多轴控制精度≤10mm;夹持力控制精度≤5%;
51.(2)耐辐照方面:机器人的液压系统要能在实现高精度运动控制功能的基础上,还具备一定的耐辐照能力(瞬时剂量达到100gy/h、累计剂量达到1000gy);此外,若主控计算机因强辐射失效,液压控制系统还需要能够控制机器人的运动、机械臂的简单运动(将其缩回),以实现整机从事故现场的撤离。
52.基于此,本技术提供了一种适用于双臂机器人的冗余液压控制系统,更具体的,提供了一种兼备高精度液压控制和高耐辐照环境下液压控制的大负载双臂搬运机器人液压控制系统,该液压控制系统主要由主控制器、高精度液压控制器、耐辐照电液控制器、应急工况线路切换模块及油缸、液压马达、编码器、压力传感器等部件组成,通过对液压控制系统进行冗余的设计,使得双臂搬运机器人在能够实现高精度搬运作业的同时,还能够实现在强辐射条件下的常规作业,最终完成机器人各种复杂工况下的救援任务。该液压控制系统可以解决以下问题:
53.1.通过搭配高精度的编码器、压力传感器、液压轴控制器及闭环控制算法实现单个油缸的高精度位置控制;
54.2.通过配备耐辐照的电液控制器,使该液压控制系统具备强辐射环境下的控制功能的实现;
55.3.通过配备线路切换模块,使得机器人能够在高精度控制与高耐辐照控制两种特性下切换;
56.4.所采用的控制策略能够满足在机器人主控失效的情况下,实现机器人从事故现场的撤离。
57.具体地,如图2所示,液压控制系统主要由以下几部分组成:主控制器、高精度液压控制装置、耐辐照电液控制装置、应急工况线路切换装置、绝对编码器、压力传感器、夹持力传感器、增量编码器及大小臂油缸、行走马达。
58.液压控制系统的设计采用冗余备份的方法,既能保证高精度控制的实现,又能保证事故工况下的机器人最小功能单元如移动本体行走功能、机械臂简单控制(离场缩回)等,使该机器人遇到紧急情况不至于失控,无法从现场撤离。
59.在正常工况下,主控制器分别发送指令给高精度液压控制装置及耐辐照电液控制装置,其中,高精度液压控制装置主要用于控制大臂、小臂及车体旋转模块的位置、夹持力和旋转角度,耐辐照电液控制装置仅完成行走液压马达、液压支腿及液压动力站的控制。
60.当发生紧急工况,主控制器及高精度液压控制装置会因事故环境下的强辐射失效,无法对机械臂及车体旋转进行有效控制;耐辐照电液控制装置可通过主控控制器及液压轴控制器发出的心跳信号来判断它们的失效,确认失效后,耐辐照电液控制装置发出指令到应急工况线路切换装置,将多路阀的电磁铁接线切换到耐辐照电液控制装置上,由耐
辐照电液控制装置接管所有液压系统。
61.耐辐照电液控制装置采用抗辐照芯片,整体具有较强的耐辐照能力,装置的屏蔽外壳一般采用铝合金,特殊情况下可采用其他材质(如不锈钢、铅、钨合金等),以实现更高指标的耐辐射性能。考虑到该控制器需要应用于恶劣的复杂环境,所以要有适应复杂环境的温湿度、尘土入侵、冲击和震动、以及电磁兼容性考虑。
62.如图3所示,耐辐照电液控制装置主要由耐辐照主控芯片、耐辐照辅控芯片、输入电路、输出电路、通信电路、电源电路几大部分组成。电源系统部分分为电子电源系统及功率电源系统;功率电源系统从外部接口直接引入,给功率输出模块供电,同时还引出24v的接口对外部模块进行供电;电子电源系统与功率电源隔离开来,防止受到干扰,电子电源系统主要对控制板的各部分进行供电,此外,还有10v、5v、3.3v的子系统对外部传感器供电;所有的电源设计均考虑防反接。
63.该耐辐照电液控制装置的核心为耐辐照主控芯片,主体架构为“主控芯片 辅控芯片 外围电路”,主控芯片上的资源主要是数字输入、ad输入、输出控制单元、通信接口控制单元,配合外部的外围模拟、数字电路实现系统的总体功能。在有必要的情况下,还可以通过iic或spi接口增加外部eeprom扩展cpu的程序空间,为大规模、复杂程序的实现提供硬件基础。主控芯片需要指出常用的程序下载及调试接口如jtag或swd,以便后续的开发及调试。
64.耐辐照电液控制装置采用双芯片(主控 辅控)架构,辅控芯片当做数据采集芯片,芯片间采用串口进行数据传输;辅控芯片要读取的数据包括24路ad信号和2路can总线;开关信号2
‑
10v
‑
10个输入放在辅控,开关信号3
‑
24v
‑
10个输入放在辅控。
65.耐辐照电液控制装置的输入电路主要有功率安全切断开关、点火激活开关、开关输入、编码器输入、频率测量输入、电压输入、电流输入、温度输入等;输出系统主要有pwm功率输出、开关功率输出、模拟功率输出、开关信号输出等。所有的输入输出都需要带故障检测功能,通过检查输入的电压值范围,或者检查输出的电流是否异常来进行判断;所有的功率输出都要有保护功能,都可以被中控cpu停用,也可以被外部的io信号停用。
66.对于耐辐照电液控制装置,重点关注比例电磁铁的可编程控制模块(即pwm功率输出模块),用于对机械设备的液压元件进行开环或闭环控制,其中闭环控制可采用软件pid来实现,使电磁铁实现最小滞后,不受电压和温度的影响,但硬件需配备相应的电流检测电路及编码器读取接口电路。
67.此外,耐辐照电液控制装置还需配备常用的通信接口如can以及rs232,可以用于与其他控制部件之间的数据交换。
68.进一步地,为实现机械臂的高精度位置控制以及末端夹取作业时的精确力控制,搬运机器人的液压及其控制系统要求要高于普通工程机械,整体上采用闭环控制的方法,以保证最终的位置控制及力控制精度。
69.液压控制系统主要用于控制搬运机器人的双机械臂、车体、液压支腿以及左右行走马达,其中液压支腿及行走马达由耐辐照电液控制装置负责控制,大臂、小臂、车体旋转控制回路由高精度液压控制装置负责控制。
70.搬运机器人的机械臂运动控制、夹取力控制需配合远程遥操作系统的力反馈主手,为了达到准确、稳定的操控,大小臂的运动控制需要配备编码器、油缸压力传感器、专用
的液压伺服轴控制器,以达到高精度的位置控制,大小臂的夹持力控制需要配备夹持力传感器、六维腕力传感器、比例减压阀、液压伺服轴控制器以达到高精度的力控制,上述两点也是本搬运机器人与普通搬运、破拆机器人系统的一大区别。
71.如图4和图5所示,对于位置控制油缸,采用“高精度编码器 油缸压力传感器 电液数字伺服轴控制器 电流放大器 高精度多路阀”的闭环位置控制方案;对于夹持力控制油缸,采用“夹持力传感器 油缸压力传感器 电液数字伺服轴控制器 高频率响应阀”的闭环夹持力控制方案。
72.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
73.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。