1.本发明属于机械工程设计领域,具体涉及一种多齿空间摆线式内啮合锥形双螺杆压缩机转子及压缩机。
背景技术:
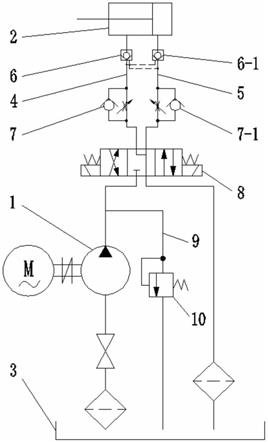
2.双螺杆压缩机是一种容积式回转压缩机,用于获取高压力气体,在现代工业中有着广泛的应用。它继承了回转机械寿命长、运转可靠、振动小、噪音低、工作平稳以及无喘振现象等诸多优点,同时具有无气阀等易损件、强制吸排气和加工简单等特点,因此是空气供应、制冷、余热回收等系统中的核心部件。
3.目前,为了进一步改善双螺杆压缩机的工作性能,双螺杆压缩机向着小型化、大压比以及低噪声方向发展,其中,内啮合锥形螺杆是一种较为良好的方案。内啮合锥形螺杆以自身结构的特点就可以实现小型化,同时能够保证大压比和低噪声。但由于内啮合锥形螺杆的啮合方式为空间内啮合,符合该啮合方式的型线有一定的要求,且其共轭曲面的求解也较为困难,很难得到解析解,并且为了方便成形转子一般采用较少的齿数,这给内啮合锥形螺杆的设计和制造带来了困难。
技术实现要素:
4.本发明的目的在于针对上述现有技术中的问题,提供一种多齿空间摆线式内啮合锥形双螺杆压缩机转子及压缩机,简化转子的成形与加工过程,转子结构强度较高,排气量大。
5.为了实现上述目的,本发明有如下的技术方案:
6.一种多齿空间摆线式内啮合锥形双螺杆压缩机转子,包括相互啮合的内外转子,内外转子的型线分别由空间外摆线和空间内摆线组成;空间外摆线是由一个锥度较小的圆锥在一个固定的锥度较大的圆锥外侧做无滑移的相切滚动运动时,其母线上一点的轨迹;空间内摆线是由一个锥度较小的圆锥在一个固定的锥度较大的圆锥内侧做无滑移的相切滚动运动时,其母线上一点的轨迹;滚动运动的圆锥为滚圆锥,固定不动的圆锥为发生圆锥;由空间外摆线和空间内摆线组合形成转子的一个齿,内外摆线滚圆锥的圆锥角和发生圆锥的圆锥角的关系决定了转子的齿数;将内外转子的型线沿着轴向方向螺旋扫描得到内外转子的型面;内外转子啮合转动时基元容积从大端到小端逐渐减小,完成内压缩过程。
7.作为本发明的一种优选方案,内转子节圆锥的底面半径r1,圆锥角δ1与外转子节圆锥的底面半径r2,圆锥角δ2之间满足:
[0008][0009]
θ=δ2‑
δ1[0010]
其中,z1为内转子的齿数,z2为内转子的齿数,满足:
[0011]
z2=z1 1。
[0012]
作为本发明的一种优选方案,在内转子型线中,内摆线滚圆锥的圆锥角为q2,外摆线滚圆锥的圆锥角为q1,满足:
[0013][0014][0015]
其中,c为型线的形状参数。
[0016]
作为本发明的一种优选方案,内外摆线滚圆锥滚动360
°
后,其母线公共点n1的坐标为:
[0017][0018]
式中,r1为内转子节圆锥任意截面上的半径,满足:
[0019][0020]
其中,p为内转子的螺距,为内转子螺旋转过的角度,其值从0变化到γ1。
[0021]
作为本发明的一种优选方案,建立空间坐标系,坐标系ox1y1z1与坐标系ox2y2z2分别为内外转子节圆锥所在坐标系,所述的坐标系ox2y2z2是坐标系ox1y1z1绕着oy1旋转θ而生成的;
[0022]
空间内摆线c
12
在坐标系ox1y1z1中的方程为:
[0023][0024]
空间外摆线c
11
在坐标系ox1y1z1中的方程为:
[0025][0026]
空间外摆线c
11
和空间内摆线c
12
连接构成内转子的一个齿,然后通过绕着oz1轴旋转复制得到完整的内转子型线c1。
[0027]
作为本发明的一种优选方案,在外转子型线中,内摆线滚圆锥的圆锥角为q2,外摆线滚圆锥的圆锥角为q1,满足:
[0028]
[0029][0030]
其中,c为型线的形状参数。
[0031]
作为本发明的一种优选方案,内外摆线滚圆锥滚动360
°
后,其母线公共点n2的坐标为:
[0032][0033]
式中,r2为外转子节圆锥任意截面上的半径,满足:
[0034][0035]
其中,l为外转子的螺距,为外转子螺旋转过的角度,其值从0变化到γ2。
[0036]
作为本发明的一种优选方案,建立空间坐标系,坐标系ox1y1z1与坐标系ox2y2z2分别为内外转子节圆锥所在坐标系,所述的坐标系ox2y2z2是坐标系ox1y1z1绕着oy1旋转θ而生成的;
[0037]
空间内摆线c
22
在坐标系ox2y2z2中的方程为:
[0038][0039]
空间外摆线c
21
在坐标系ox2y2z2中的方程为:
[0040][0041]
空间内摆线c
22
和空间外摆线c
21
连接构成外转子的一个齿,然后通过绕着oz2轴旋转复制得到完整的外转子型线c2。
[0042]
作为本发明的一种优选方案,内转子型线c1以螺距为p,螺旋角为γ1螺旋扫描形成内转子型面σ1,螺旋扫描的过程中内转子节圆锥半径r1逐渐减小,内外摆线滚圆锥的母线公共点 n1的位置也相应发生变化;外转子型线c2以螺距为l,螺旋角为γ2螺旋扫描形成外转子型面σ2,螺旋扫描的过程中外转子节圆锥半径r2逐渐减小,内外摆线滚圆锥的母线公共点n2的位置也相应发生变化;
[0043]
内外转子的螺旋角γ1与γ2满足:
[0044][0045]
内外转子的螺距p与l满足:
[0046][0047]
内外转子同方向旋转,内转子的角速度ω1和外转子的角速度ω2满足:
[0048][0049]
本发明还提供一种压缩机,转子采用所述多齿空间摆线式内啮合锥形双螺杆压缩机转子。
[0050]
相较于现有技术,本发明有如下的有益效果:
[0051]
以空间外摆线和空间内摆线的组合曲线作为内外转子的型线,能够适用于内啮合锥形双螺杆,相比传统的双螺杆,内啮合方式能够降低转子间中心距的大小,且内外转子自身就可以形成密封容积,故无需安装机壳,避免了转子与机壳之间的泄露。而锥形结构使得密封容积沿轴向连续的减小,可以完成连续的压缩,有效减少震动和噪声,且能提供较大的压比,使压缩机小型化。本发明的转子可以做到多齿数,较多的齿数可以增加转子的结构强度,提高转子的寿命,多齿还可以形成多个吸气腔和排气腔,相当于增加了压缩机的排气量。
[0052]
进一步的,本发明提出的转子型线通过具体的参数方程可以设置,摆线方程较为简单,在实现内啮合锥形螺杆复杂的空间内啮合条件下,大大简化了内啮合锥形螺杆的成形与加工,在具体方程的控制下,转子复杂三维模型的设计得到了简化。本发明提出的转子还可以根据独立变量进行形状的控制,方便在面对具体要求下进行转子模型的优化。
附图说明
[0053]
图1本发明转子型线原理示意图;
[0054]
图2本发明内外转子节圆锥坐标系示意图;
[0055]
图3本发明内转子型线生成示意图;
[0056]
图4本发明外转子型线生成示意图;
[0057]
图5本发明内转子型面示意图:(a)内转子型面;(b)外转子型面;
[0058]
图6本发明内外转子装配示意图;
[0059]
图7本发明内外转子啮合转动示意图;
[0060]
图8本发明内外转子调整形状示意图:
[0061]
(a)c=0.2,z2=5;(b)c=0.6,z2=5;(c)c=0.8,z2=5; (d)c=0.6,z2=6;(e)c=0.7,z2=7;(f)c=0.4,z2=8。
具体实施方式
[0062]
下面结合附图及实施例对本发明做进一步的详细说明。
[0063]
本发明提出了一种多齿空间摆线式内啮合锥形双螺杆压缩机转子,内外转子的型线分别由空间外摆线和空间内摆线的组合曲线形成;具体的,空间外摆线是由一个锥度较小的圆锥在一个固定的锥度较大的圆锥外侧做无滑移的相切滚动运动时,其母线上一点的轨迹;空间内摆线是由一个锥度较小的圆锥在一个固定的锥度较大的圆锥内侧做无滑移的相切滚动运动时,其母线上一点的轨迹。滚动运动的圆锥称为滚圆锥,固定不动的圆锥称为
发生圆锥。
[0064]
如图1所示,外摆线滚圆锥e1在发生圆锥e的外侧做无滑移的滚动运动时,其母线上边缘的一点m1的轨迹称为空间外摆线。内摆线滚圆锥e2在发生圆锥e的内侧做无滑移的滚动运动时,其母线上边缘的一点m2的轨迹称为空间内摆线。这两条空间曲线的组合构成了转子的一个齿,其内外摆线滚圆锥的圆锥角和发生圆锥的圆锥角的关系决定了转子的齿数。
[0065]
如图2所示,建立空间坐标系,确定内外转子节圆锥。图中坐标系ox1y1z1与坐标系 ox2y2z2分别为内外转子节圆锥所在坐标系,坐标系ox2y2z2是坐标系ox1y1z1绕着oy1旋转θ而生成的。内转子节圆锥的底面半径为r1,圆锥角为δ1,中心轴与oz1重合。外转子节圆锥的底面半径为r2,圆锥角为δ2,中心轴与oz2重合。如图3所示,以内转子节圆锥作为发生圆锥,内转子齿数为z1,内外摆线滚圆锥均滚动360
°
后,其母线上公共一点n1的所形成的两条轨迹线即为空间外摆线c
11
和内摆线c
12
,两条空间曲线相连接,如此获得内转子一个齿的型线,然后通过旋转复制得到完整的内转子型线c1。如图4所示,以外转子节圆锥作为发生圆锥,外转子齿数为z2(z2=z1 1),内外摆线滚圆锥均滚动360
°
后,其母线上公共一点n2的所形成的两条轨迹线即为空间外摆线c
21
和内摆线c
22
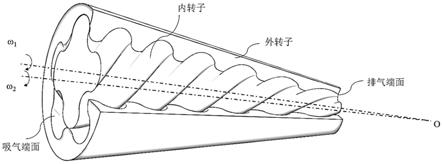
,两条空间曲线相连接,如此获得内转子一个齿的型线,然后通过旋转复制得到完整的外转子型线c2。如图5的(a)和 (b)所示,将内外转子型线c1和c2沿着轴向方向螺旋扫描得到内外转子的型面σ1和σ2,螺旋扫描的同时内外转子节圆锥半径r1,r2逐渐减小,点n1和点n2始终重合,其位置在母线上往下滑移。内转子螺距为p,螺旋角为γ1,外转子螺距为l,螺旋角为γ2。如图6所示,内外转子可完成正确的配合关系,内外转子同方向旋转,气体从大端处吸入,小端处排出。如图7所示,随着内外转子的转动,内外转子可以实现啮合,基元容积从大端到小端逐渐减小,完成内压缩。如图8的(a)至(f)所示,内外转子型线可根据独立变量进行形状调整。
[0066]
参见图1,内摆线滚圆锥在发生圆锥内侧做无滑移的逆时针滚动运动,其上一点m1的轨迹为空间外摆线,外摆线滚圆锥在发生圆锥外侧做无滑移的逆时针滚动运动,其上一点m2的轨迹为空间外摆线,三个圆锥的母线重合,m1与m2两点重合。
[0067]
参见图2,内转子节圆锥的底面半径r1,圆锥角δ1与外转子节圆锥的底面半径r2,圆锥角δ2之间满足:
[0068][0069]
θ=δ2‑
δ1[0070]
其中,z1为内转子的齿数,z2为内转子的齿数,满足:
[0071]
z2=z1 1
[0072]
参见图3,内摆线滚圆锥的圆锥角为q2,外摆线滚圆锥的圆锥角为q1,满足:
[0073][0074][0075]
其中,c为型线的形状参数。
[0076]
点n1的坐标为:
[0077][0078]
r1为内转子节圆锥任意截面上的半径,满足:
[0079][0080]
其中,p为内转子的螺距,为内转子螺旋转过的角度,其值从0变化到γ1。
[0081]
空间内摆线c
12
在坐标系ox1y1z1中的方程为:
[0082][0083]
空间外摆线c
11
在坐标系ox1y1z1中的方程为:
[0084][0085]
由空间内摆线c
12
和空间外摆线c
11
连接构成内转子的一个齿,然后通过绕着oz1轴旋转复制得到完整的内转子型线c1。
[0086]
参见图4,内摆线滚圆锥的圆锥角为q2,外摆线滚圆锥的圆锥角为q1,满足:
[0087][0088][0089]
点n2的坐标为:
[0090][0091]
r2为外转子节圆锥任意截面上的半径,满足:
[0092][0093]
其中,l为外转子的螺距,为外转子螺旋转过的角度,其值从0变化到γ2。
[0094]
空间内摆线c
22
在坐标系ox2y2z2中的方程为:
[0095][0096]
空间外摆线c
21
在坐标系ox2y2z2中的方程为:
[0097][0098]
由空间内摆线c
22
和空间外摆线c
21
连接构成外转子的一个齿,然后通过绕着oz2轴旋转复制得到完整的外转子型线c2。
[0099]
参见图5的(a)和(b),内转子型线c1以螺距为p,螺旋角为γ1螺旋扫描形成内转子型面σ1,螺旋扫描过程中内转子节圆锥半径r1逐渐减小,点n1的位置也相应发生变化。外转子型线c2以螺距为l,螺旋角为γ2螺旋扫描形成外转子型面σ2,螺旋扫描过程中外转子节圆锥半径r2逐渐减小,点n2的位置也相应发生变化。
[0100]
内外转子的螺旋角γ1与γ2满足:
[0101][0102]
内外转子的螺距p与l满足:
[0103][0104]
参见图6,内外转子同方向旋转,内转子的角速度ω1和外转子的角速度ω2满足:
[0105][0106]
参见图7,随着内外转子的旋转,基元容积由大端向小端方向逐渐减小,实现内压缩过程,被压缩的流体从大端处吸入,小端处排出。
[0107]
参见图8的(a)至(f),内外转子可以根据改变形状参数c,z2的值进行灵活调控。
[0108]
以上求解过程中的独立变量为:转子型线的独立变量(外转子齿数z2,形状参数c),螺旋扫描的独立变量(外转子螺距l和螺旋角γ2)与坐标系的独立变量(外转子节圆锥底面半径r2与圆锥角δ2)。在具体设计过程中,可根据不同的工况要求调整上述独立变量。
[0109]
实施例
[0110]
本发明提出的多齿空间摆线式内啮合锥形双螺杆压缩机转子当中,内外转子的型线均为空间内摆线和外摆线的组合曲线。将内外转子型线c1和c2沿着轴向方向螺旋扫描得到内外转子的型面σ1和σ2。其独立参数有外转子齿数z2,形状参数c,外转子节圆锥底面半径r2与圆锥角δ2,外转子螺距l,外转子螺旋角γ2。其设计过程如下:
[0111]
1)由体积大小与抽气速率优选外转子齿数z2,形状参数c,外转子节圆锥底面半径
r2与圆锥角δ2,外转子螺距l,螺旋角γ2;取外转子齿数z2为5,形状参数c为0.6,外转子节圆锥的底面半径r2为42mm,外转子节圆锥的圆锥角δ2为8
°
,外转子螺距l为180mm。
[0112]
2)由气体的密封性要求、受力性能等要求优选外转子螺旋角γ2为12π/5(432
°
)。
[0113]
3)利用上述优选参数进行转子型面的求解;
[0114]
利用下列式子:
[0115][0116][0117][0118][0119]
确定内转子的型线c1。
[0120]
利用下列式子:
[0121][0122][0123][0124][0125]
确定内转子的型线c2。
[0126]
将内转子型线c1沿着轴向方向以螺距为p,螺旋角为γ1的方式螺旋扫描得到内转
子的三维型面σ1。将外转子型线c2沿着轴向方向以螺距为l,螺旋角为γ2的方式螺旋扫描得到外转子的三维型面σ2。通过本设计方法所产生的内啮合双螺杆内外转子结构能完成正确的啮合,内外转子的配合转动可以实现内部工作腔体的容积周期性变化,实现气体的强制运输。
[0127]
本发明双螺杆转子结构可实现气体的加压与运输过程,其型线简单,通过具体的参数方程设置,可实现多齿结构,能够快速完成内啮合锥形螺杆的成形。面对不同的设计要求可灵活改变形状。总的来说,本发明有着小型化,低噪声,大压比,成形快,多齿数等优点。
[0128]
以上所述的仅仅是本发明的较佳实施例,并不用以对本发明的技术方案进行任何限制,本领域技术人员应当理解的是,在不脱离本发明精神和原则的前提下,该技术方案还可以进行若干简单的修改和替换,这些修改和替换也均属于权利要求书所涵盖的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。