1.本发明涉及家用电器领域,具体涉及一种控制方法、装置以及存储介质。
背景技术:
2.在家庭生活中,风扇是使用频率较高的家用电器,为了扩大风扇为用户送风的范围,摇头功能是风扇必不可少的基本功能;而在用户需要关闭风扇时,如何控制风扇头复位,使得风扇恢复至初始状态是非常重要的。
3.然而,相关技术中,在风扇关闭时控制风扇头复位的方法尚需优化。
技术实现要素:
4.为解决相关技术问题,本发明实施例提供一种控制方法、装置以及存储介质。
5.本发明实施例的技术方案是这样实现的:
6.本发明实施例提供了一种控制方法,包括:
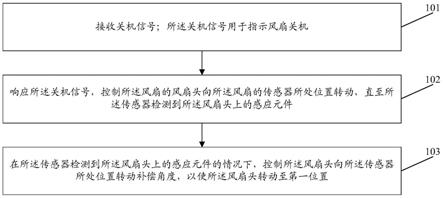
7.接收关机信号;所述关机信号用于指示风扇关机;
8.响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;
9.在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置。
10.上述方案中,所述控制所述风扇的风扇头向所述风扇的传感器所处位置转动,包括:
11.检测所述风扇头的第二位置;所述第二位置为接收到关机信号时所述风扇头所处的位置;
12.根据所述第二位置与所述传感器所处位置之间的位置关系,确定所述风扇头的转动方向;
13.利用确定的转动方向,控制所述风扇头转动。
14.上述方案中,所述接收关机信号,包括:
15.在所述风扇头基于左右摇头模式或上下摇头模式转动的情况下,接收所述关机信号。
16.上述方案中,所述控制所述风扇的风扇头向所述风扇的传感器所处位置转动,包括:
17.控制所述风扇头停止基于左右摇头模式或上下摇头模式转动,并控制所述风扇头向所述传感器所处位置转动。
18.上述方案中,所述传感器检测到所述风扇头上的感应元件,包括:
19.所述传感器检测到所述感应元件发送的感应信号。
20.本发明实施例还提供了一种控制装置,包括:
21.接收单元,用于接收关机信号;所述关机信号用于指示风扇关机;
22.第一处理单元,用于响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;
23.第二处理单元,用于在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置。
24.上述方案中,所述第一处理单元,具体用于:
25.检测所述风扇头的第二位置;所述第二位置为接收到关机信号时所述风扇头所处的位置;
26.根据所述第二位置与所述传感器所处位置之间的位置关系,确定所述风扇头的转动方向;
27.利用确定的转动方向,控制所述风扇头转动。
28.上述方案中,所述接收单元,具体用于:
29.在所述风扇头基于左右摇头模式或上下摇头模式转动的情况下,接收所述关机信号。
30.本发明实施例还提供了一种控制装置,包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器;
31.其中,所述处理器用于运行所述计算机程序时,执行上述任一方法的步骤。
32.本发明实施例还提供了一种存储介质,所述介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一方法的步骤。
33.本发明实施例提供的控制方法、装置以及存储介质,接收关机信号;所述关机信号用于指示风扇关机;响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置。本发明实施例的方案,在接收到关机信号时,控制风扇的风扇头向风扇的传感器所处位置转动,并在传感器检测到风扇头上的感应元件的情况下,控制风扇头向传感器所处位置转动补偿角度,如此,能够提高风扇头复位的效率,并提高风扇头复位的准确性,进而提升用户体验。
附图说明
34.图1为本发明实施例控制方法的流程示意图;
35.图2为本发明应用实施例控制方法的流程示意图;
36.图3为本发明应用实施例风扇头的转动轨迹示意图;
37.图4为本发明实施例控制装置的结构示意图;
38.图5为本发明实施例控制装置的硬件结构示意图。
具体实施方式
39.以下结合说明书附图及实施例对本发明的技术方案作进一步详细的阐述。
40.相关技术中,大部分风扇在关机时,用于控制风扇头转动的驱动部件立刻停止转动,风扇头无法实现自动复位;为了使得风扇头能够自动复位,可以在风扇头上安装感应元件,并在风扇的中点位置(比如风扇头的转动角度为0
°
时,感应元件在风扇的支撑部件正对
的位置)设置传感器,所述传感器用于检测风扇头上的感应元件;当风扇接收到关机信号时,继续基于当前摇头模式(可以包括左右摇头模式和上下摇头模式)控制风扇头转动,直至所述传感器检测到所述感应元件;并在所述传感器检测到所述感应元件时,控制所述驱动部件停止转动;这样,便实现了风扇关闭前风扇头的自动复位。
41.然而,在风扇头自动复位的过程中,由于传感器存在感应区间,因此,在感应元件并未正对传感器的情况下,传感器仍旧可以检测到感应元件;也就是说,风扇接收到关机信号时,继续以当前摇头模式控制风扇头转动,在风扇头并未转动至预设复位位置(可以是风扇头在转动角度为0
°
时的位置)的情况下,传感器就已经检测到风扇头上的感应元件;在此前提下,以传感器是否检测到感应元件为根据,停止风扇驱动部件的转动,会使得风扇头自动复位的位置不准确。
42.基于此,在本发明的各种实施例中,在接收到关机信号时,控制风扇的风扇头向风扇的传感器所处位置转动,并在传感器检测到风扇头上的感应元件的情况下,控制风扇头向传感器所处位置转动补偿角度,如此,能够提高风扇头复位的效率,并提高风扇头复位的准确性,进而提升用户体验。
43.本发明实施例提供了一种控制方法,如图1所示,所述方法包括以下步骤:
44.步骤101:接收关机信号;
45.这里,所述关机信号用于指示风扇关机;
46.步骤102:响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;
47.步骤103:在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置。
48.需要说明的是,本发明实施例提供的控制方法,应用于电子设备;所述电子设备可以是风扇,也可以是与风扇建立了通信连接的控制装置,所述控制装置用于控制风扇运行。
49.在步骤101中,实际应用时,接收的关机信号可以是用户通过智能终端发送的关机信号;所述智能终端可以是智能遥控器、用户终端等;所述用户终端可以包括个人电脑(pc,personal computer)、手机等;所述pc可以包括台式电脑、笔记本电脑、平板电脑等;接收的关机信号还可以是用户对风扇上的控制面板进行操作时触发的关机信号。
50.实际应用时,如果风扇未处于左右摇头模式或上下摇头模式,即风扇头并未转动,则风扇头不需要进行复位;因此,本发明实施例的应用场景为风扇头基于左右摇头模式或上下摇头模式转动的应用场景。
51.基于此,在一实施例中,所述接收关机信号,可以包括:
52.在所述风扇头基于左右摇头模式或上下摇头模式转动的情况下,接收所述关机信号。
53.在步骤102中,实际应用时,所述传感器可以设置在所述风扇的中点位置;所述中点位置可以是所述风扇头的转动角度为0
°
时,在所述风扇的支撑部件上与所述感应元件正对的位置。所述传感器可以是霍尔传感器、光传感器(比如激光传感器、红外传感器等)等;所述感应元件是与所述传感器对应的感应元件;比如,当所述传感器是霍尔传感器时,所述感应元件为磁性元件(比如磁铁)。
54.在一实施例中,所述控制所述风扇的风扇头向所述风扇的传感器所处位置转动,
可以包括:
55.控制所述风扇头停止基于左右摇头模式或上下摇头模式转动,并控制所述风扇头向所述传感器所处位置转动。
56.实际应用时,在接收到关机信号后,控制所述风扇头停止基于左右摇头模式或上下摇头模式转动,并控制所述风扇头向所述传感器所处位置转动;可以使得风扇在接收到关机信号后立刻开始复位,不会继续进行之前的摇头过程;如此,能够提高风扇头复位的效率。
57.在一实施例中,所述控制所述风扇的风扇头向所述风扇的传感器所处位置转动,还可以包括:
58.检测所述风扇头的第二位置;所述第二位置为接收到关机信号时所述风扇头所处的位置;
59.根据所述第二位置与所述传感器所处位置之间的位置关系,确定所述风扇头的转动方向;
60.利用确定的转动方向,控制所述风扇头转动。
61.实际应用时,所述第二位置可以表征所述风扇头相对于所述传感器所处的位置信息;比如,所述第二位置可以为:风扇头相对于所述传感器所处位置向左、右、上或下转动了n
°
的位置,n不等于0。实际应用时,为了检测所述风扇头的第二位置,可以在风扇中设置检测部件;所述检测部件用于检测所述风扇头的第二位置;所述检测部件可以是位置传感器、距离传感器等。在所述风扇的驱动部件(所述驱动部件用于控制所述风扇头转动)为步进电机的情况下,还可以通过检测所述步进电机的步数,检测所述风扇头的第二位置。
62.实际应用时,所述第二位置与所述传感器所处位置之间的位置关系,可以包括以下之一:
63.所述第二位置在所述传感器所处位置左侧;
64.所述第二位置在所述传感器所处位置右侧;
65.所述第二位置在所述传感器所处位置上侧;
66.所述第二位置在所述传感器所处位置下侧。
67.具体地,根据所述第二位置与所述传感器所处位置之间的位置关系,确定所述风扇头的转动方向,可以包括:所述第二位置在所述传感器所处位置左侧时,可以确定所述风扇头的转动方向为向右转动;所述第二位置在所述传感器所处位置右侧时,可以确定所述风扇头的转动方向为向左转动;所述第二位置在所述传感器所处位置上侧时,可以确定所述风扇头的转动方向为向下转动;所述第二位置在所述传感器所处位置下侧时,可以确定所述风扇头的转动方向为向上转动。
68.实际应用时,所述利用确定的转动方向,控制所述风扇头转动,可以包括:利用确定的转动方向,控制所述风扇的驱动部件转动,以控制所述风扇头向所述传感器所处位置转动。这里,所述驱动部件可以为步进电机。
69.实际应用时,所述传感器检测到所述风扇头上的感应元件,可以包括:
70.所述传感器检测到所述感应元件发送的感应信号。
71.这里,所述传感器检测到所述感应元件发送的感应信号,表征所述风扇头转动至所述传感器的感应区间内。
72.在步骤103中,实际应用时,所述第一位置可以为研发人员或用户预先设置的复位位置;比如,所述第一位置可以为所述感应元件正对所述传感器时,所述风扇头所处的位置;再比如,所述第一位置可以为所述风扇头的转动角度为0
°
时所处的位置。
73.实际应用时,所述补偿角度也可以为研发人员或用户预先设置的角度;控制所述风扇头向不同的方向转动时,所述补偿角度可以相同或不同;比如,控制所述风扇头向左或向右转动的补偿角度可以均为20
°
;再比如,控制所述风扇头向上转动的补偿角度可以为20
°
,控制所述风扇头向下转动的补偿角度可以为13
°
。
74.本发明实施例提供的控制方法,接收关机信号;所述关机信号用于指示风扇关机;响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置;如此,能够提高风扇头复位的效率,并提高风扇头复位的准确性,进而提升用户体验。
75.下面结合应用实施例对本发明再作进一步详细的描述。
76.本应用实施例提供的控制方法应用于风扇;所述风扇包括控制端;所述控制端用于控制所述风扇运行。
77.本应用实施例提供的控制方法,如图2所示,具体可以包括以下步骤:
78.步骤201:在风扇头摆动过程中(即在所述风扇头基于左右摇头模式或上下摇头模式转动的过程中),风扇的控制端接收到关机信号。
79.这里,步骤201的具体实现过程与图1所示的控制方法中步骤101的具体实现过程相同,这里不多赘述。
80.步骤202:所述控制端检测控制风扇摆动的步进电机的所在位置,基于步进电机所在位置与参考点(即上述风扇的传感器所处位置)的位置关系,控制步进电机向靠近参考点的方向转动,直到风扇头上的感应元件运动到传感器的感应区间内。
81.具体地,在传感器感应到感应元件的感应信号时,可以确定感应元件运动到传感器的感应区间内。
82.这里,步骤202的具体实现过程与图1所示的控制方法中步骤102的具体实现过程相同,这里不多赘述。
83.步骤203:控制步进电机向靠近参考点的方向继续转动补偿角度,以使风扇头转动到正对所述参考点的位置(即上述第一位置),从而实现了风扇头的自动复位。
84.这里,步骤203的具体实现过程与图1所示的控制方法中步骤103的具体实现过程相同,这里不多赘述。
85.实际应用时,在利用本应用实施例提供的控制方法实现风扇头的自动复位的过程中,风扇头的转动轨迹可以如图3所示,在图3中,传感器301设置在风扇上,(p1,p2)表征传感器301的感应区间;感应元件302设置在风扇头上;“oa”、“od”、“ob”和“oc”分别表征不同位置的风扇头;在风扇头从“od”位置向“oa”位置转动的过程中,风扇的控制端接收到风扇的关机信号,此时,所述控制端通过检测风扇头上的步进电机所在的位置,确定风扇头的当前位置;这里,所述控制端检测到步进电机在参考点(即传感器301所处位置)的右侧;所述控制端通过控制步进电机控制风扇头向左转动,以使风扇头靠近所述参考点,在此过程中,
感应元件302随着风扇头向左转动并不断靠近所述参考点;直到风扇头转动至“ob”位置,此时感应元件302位于b点,已经转动至传感器301的感应区间内,传感器301能够感应到感应元件302的感应信号;接着,所述控制端继续通过控制步进电机控制风扇头向左转动补偿角度,以使风扇头转动至“oc”位置(“oc”位置正对所述参考点),从而实现了风扇头的自动复位。
86.实际应用时,为了提高风扇头复位的准确性,可以由研发人员基于对风扇进行的多次测试的实验结果确定所述补偿角度;比如,在不控制风扇头向传感器所处位置转动补偿角度的情况下,对风扇头向左复位进行100次测试,确定每次测试时风扇复位的偏差角度,并确定100个偏差角度的平均值,确定的平均值即为控制风扇头向左复位时需要转动的补偿角度。
87.本应用实施例提供的控制方法,具备以下优点:
88.风扇头接收到关机信号后立刻向参考点方向转动,不会继续完成之前的摇头过程,提高了风扇复位的响应效率;并且,通过补偿角度的设置,使得复位的风扇头更加接近参考点,以此提高了风扇头复位的准确性。
89.为了实现本发明实施例的方法,本发明实施例还提供了一种控制装置,如图4所示,控制装置400包括接收单元401、第一处理单元402和第二处理单元403;其中,
90.所述接收单元401,用于接收关机信号;所述关机信号用于指示风扇关机;
91.所述第一处理单元402,用于响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;
92.所述第二处理单元403,用于在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置;其中,
93.所述传感器检测到所述风扇头上的感应元件,包括:
94.所述传感器检测到所述感应元件发送的感应信号。
95.在一实施例中,所述第一处理单元402,具体用于:
96.检测所述风扇头的第二位置;所述第二位置为接收到关机信号时所述风扇头所处的位置;
97.根据所述第二位置与所述传感器所处位置之间的位置关系,确定所述风扇头的转动方向;
98.利用确定的转动方向,控制所述风扇头转动。
99.在一实施例中,所述接收单元401,具体用于:
100.在所述风扇头基于左右摇头模式或上下摇头模式转动的情况下,接收所述关机信号。
101.在一实施例中,所述第一处理单元402,还用于:
102.控制所述风扇头停止基于左右摇头模式或上下摇头模式转动,并控制所述风扇头向所述传感器所处位置转动。
103.这里,所述接收单元401、所述第一处理单元402和所述第二处理单元403的功能相当于本发明应用实施例中控制端的功能。
104.实际应用时,所述接收单元401、所述第一处理单元402和所述第二处理单元403可
由控制装置400中的处理器结合通信接口实现。
105.需要说明的是:上述实施例提供的控制装置400在控制风扇运行时,仅以上述各程序模块的划分进行举例说明,实际应用时,可以根据需要而将上述处理分配由不同的程序模块完成,即将终端的内部结构划分成不同的程序模块,以完成以上描述的全部或者部分处理。另外,上述实施例提供的控制装置400与控制方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
106.基于上述程序模块的硬件实现,且为了实现本发明实施例的方法,本发明实施例还提供了一种控制装置,如图5所示,所述控制装置50包括:
107.通信接口51,能够与其它设备(比如网络设备、终端等)进行信息交互;
108.处理器52,与所述通信接口51连接,以实现与其它设备进行信息交互,用于运行计算机程序时,执行上述一个或多个技术方案提供的方法;
109.存储器53,用于存储能够在所述处理器52上运行的计算机程序。
110.具体地,所述处理器52用于执行以下操作:
111.接收关机信号;所述关机信号用于指示风扇关机;
112.响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述风扇头上的感应元件;
113.在所述传感器检测到所述风扇头上的感应元件的情况下,控制所述风扇头向所述传感器所处位置转动补偿角度,以使所述风扇头转动至第一位置。
114.在一实施例中,所述处理器52,还用于执行以下操作:
115.检测所述风扇头的第二位置;所述第二位置为接收到关机信号时所述风扇头所处的位置;
116.根据所述第二位置与所述传感器所处位置之间的位置关系,确定所述风扇头的转动方向;
117.利用确定的转动方向,控制所述风扇头转动。
118.在一实施例中,所述处理器52,还用于在所述风扇头基于左右摇头模式或上下摇头模式转动的情况下,接收所述关机信号。
119.在一实施例中,所述处理器52,还用于控制所述风扇头停止基于左右摇头模式或上下摇头模式转动,并控制所述风扇头向所述传感器所处位置转动。
120.在一实施例中,所述处理器52,还用于响应所述关机信号,控制所述风扇的风扇头向所述风扇的传感器所处位置转动,直至所述传感器检测到所述感应元件发送的感应信号;
121.需要说明的是:所述处理器52具体执行上述操作的过程详见方法实施例,这里不再赘述。
122.当然,实际应用时,控制装置50中的各个组件通过总线系统54耦合在一起。可理解,总线系统54用于实现这些组件之间的连接通信。总线系统54除包括数据总线之外,还包括电源总线、控制总线和状态信号总线。但是为了清楚说明起见,在图5中将各种总线都标为总线系统54。
123.本发明实施例中的存储器53用于存储各种类型的数据以支持控制装置50的操作。这些数据的示例包括:用于在控制装置50上操作的任何计算机程序。
124.上述本发明实施例揭示的方法可以应用于处理器52中,或者由处理器52实现。处理器52可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法的各步骤可以通过处理器52中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器52可以是通用处理器、数字信号处理器(dsp,digital signal processor),或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。处理器52可以实现或者执行本发明实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本发明实施例所公开的方法的步骤,可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于存储介质中,该存储介质位于存储器53,处理器52读取存储器53中的信息,结合其硬件完成前述方法的步骤。
125.在示例性实施例中,控制装置50可以被一个或多个应用专用集成电路(asic,application specific integrated circuit)、dsp、可编程逻辑器件(pld,programmable logic device)、复杂可编程逻辑器件(cpld,complex programmable logic device)、现场可编程门阵列(fpga,field-programmable gate array)、通用处理器、控制器、微控制器(mcu,micro controller unit)、微处理器(microprocessor)、或者其他电子元件实现,用于执行前述方法。
126.可以理解,本发明实施例的存储器(存储器53)可以是易失性存储器或者非易失性存储器,也可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(rom,read only memory)、可编程只读存储器(prom,programmable read-only memory)、可擦除可编程只读存储器(eprom,erasable programmable read-only memory)、电可擦除可编程只读存储器(eeprom,electrically erasable programmable read-only memory)、磁性随机存取存储器(fram,ferromagnetic random access memory)、快闪存储器(flash memory)、磁表面存储器、光盘、或只读光盘(cd-rom,compact disc read-only memory);磁表面存储器可以是磁盘存储器或磁带存储器。易失性存储器可以是随机存取存储器(ram,random access memory),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的ram可用,例如静态随机存取存储器(sram,static random access memory)、同步静态随机存取存储器(ssram,synchronous static random access memory)、动态随机存取存储器(dram,dynamic random access memory)、同步动态随机存取存储器(sdram,synchronous dynamic random access memory)、双倍数据速率同步动态随机存取存储器(ddrsdram,double data rate synchronous dynamic random access memory)、增强型同步动态随机存取存储器(esdram,enhanced synchronous dynamic random access memory)、同步连接动态随机存取存储器(sldram,synclink dynamic random access memory)、直接内存总线随机存取存储器(drram,direct rambus random access memory)。本发明实施例描述的存储器旨在包括但不限于这些和任意其它适合类型的存储器。
127.在示例性实施例中,本发明实施例还提供了一种存储介质,即计算机存储介质,具体为计算机可读存储介质,例如包括存储计算机程序的存储器53,上述计算机程序可由控制装置50的处理器52执行,以完成前述方法所述步骤。计算机可读存储介质可以是fram、rom、prom、eprom、eeprom、flash memory、磁表面存储器、光盘、或cd-rom等存储器。
128.需要说明的是:“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的
顺序或先后次序。
129.另外,本发明实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
130.以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。