1.本实用新型涉及滑雪模拟器械技术领域,特别涉及一种越野滑雪模拟器的气动控制系统。
背景技术:
2.虽然我国目前已是世界公认的体育大国,但我国运动员在冬季运动项目上的成绩一直不尽如人意,特别是我国的越野滑雪项目,与欧洲一些越野滑雪大国相比存在较大差距。
3.越野滑雪是一项对体能要求极高的冬奥及冬残奥雪上项目,被誉为“雪上马拉松”。其中,在冬奥项目中,越野滑雪运动员需站在一对滑雪板上,进行撑杖滑行;在冬残奥项目中,坐式越野滑雪运动员需要在一对滑雪板上装备一个坐式滑雪器,残疾人运动员坐在滑雪器上依靠上肢力量进行撑杖滑行。然而,我国的越野滑雪运动起步较晚、发展缓慢,在训练器械上和欧洲国家相比存在着较大的差距,这个问题严重制约了我国越野滑雪运动的发展速度。
4.目前市面上常见的越野滑雪模拟器,如专利us8986167(美国,公告日:2015.03.24)提供的一种模仿越野滑雪的训练器材,具有一套滑轨拉绳系统,依靠绳子上的拉力来模拟越野滑雪撑杆阻力。该器械在使用时,滑雪杖底部尖端需附着在导轨上的滑块上。回程时,滑雪杖无法正常抬起,需附着在滑块上一起返回起点位置以进行下一次撑杆。该器械虽然能够很好地模拟越野滑雪运动的撑杆阶段,但由于在回程过程中滑雪杖无法抬起,无法实现越野滑雪动作的完整模拟。
5.此外,由于气压传动具有以下特点:(1)以取之不尽用之不竭的空气作为工作介质,对外界环境有良好的适应性;(2)气动装置结构更为简单轻便,安装和维护容易;(3)气压传动反应快且动作迅速,可实现滑块快速回程;(4)气体具有可压缩性,模拟撑杆阻力具有一定的灵活性。因此,可以基于气压传动技术来设计一款既能用于站姿越野滑雪,又能用于残疾人坐式越野滑雪模拟器的控制系统,来帮助越野滑雪运动员快速提升竞技水平。
技术实现要素:
6.本实用新型的目的在于提供一种越野滑雪模拟器的气动控制系统,将气压传动的特点应用于越野滑雪模拟器中,克服现有的滑轨拉绳式越野滑雪模拟器存在的问题,通过气压驱动实现滑块快速自动回程,在回程过程滑雪杖可以自由抬起,从而可以实现越野滑雪动作的全过程模拟。另外,由于气体具有可压缩性,可以更加灵活地根据撑杆快慢实现越野滑雪阻力的模拟,以提高本套设备的越野滑雪模拟效果,从而可以帮助站姿和坐式越野滑雪运动员快速提升越野滑雪技术水平。
7.为了实现上述目的,本实用新型采用如下技术方案:
8.本实用新型提出的一种越野滑雪模拟器的气动控制系统,其特征在于,包括两套相互对称且彼此独立的气动控制子系统,各气动控制子系统均分别包括机械式无杆气缸、
气源单元和背压控制模块;其中,所述机械式无杆气缸作为越野滑雪模拟器中的滑道,由所述机械式无杆气缸的活塞和滑台沿气缸腔体轴向的往复运动来模拟滑雪过程中人体与撑杆落点间的相对运动;所述背压控制模块包括通过管道依次连接的电控比例阀、气控背压阀和压力传感器;所述机械式无杆气缸的后端盖上设有三个气口,所述机械式无杆气缸的前端盖上设有一个气口;所述气源单元的出气口通过依次设有t型三通接头、减压阀和三位五通电磁阀的管道形成主支路,该主支路通过所述三位五通电磁阀后形成前腔供/排气支路和后腔供气支路,分别与机械式无杆气缸的第四气口和第一气口连通,所述前腔供/排气支路上设有调压阀,所述后腔供气支路上设有单向阀和节流阀;所述气源单元的出气口通过所述t型三通接头后还形成有与机械式无杆气缸的第二气口连通的背压控制支路,所述背压控制模块设置于该背压控制支路上;所述机械式无杆气缸的第三气口与一快速排气支路连通;该快速排气支路上设有二位二通电磁阀;所述机械式无杆气缸的侧壁上沿气缸轴向设有多个磁性开关,通过机械式无杆气缸活塞的磁环与各磁性开关接触、断开时的信号变化,检测所述机械式无杆气缸中活塞的位置从而控制电控比例阀、三位五通电磁阀和二位二通电磁阀的动作。
9.与现有技术相比,本实用新型具有以下特点及有益效果:
10.本实用新型以空气作为工作介质,来源方便,排气处理简单、无污染,对工作环境适用性较好。另外,气动装置结构简单轻便,安装和维护容易,易于标准化、系列化和通用化。
11.由于本实用新型采用气压传动,具有动作迅速、反应快、调节方便等优点,可驱动滑块实现快速自动回程。同时,在滑块回程过程中,滑雪杖可以自由抬起进行正常滑雪运杆,从而克服现有的滑轨拉绳式越野滑雪模拟器滑雪杖无法正常抬起的问题,实现越野滑雪动作的全过程模拟。
12.另外,由于气体具有可压缩性,在撑杆推动滑块及活塞向后运动过程中,使用者撑杆越快,气缸后腔体积变化得越快,气压无法通过排气支路及时下降至设定值,气缸后腔中的气压产生的撑杆阻力会略微上升。上述特性与实际滑雪中撑杆划得越快,感受到的撑杆阻力越大的实际情况相契合。因此,本实用新型可以更加灵活地根据撑杆快慢实现越野滑雪阻力的模拟,从而可以更加真实地模拟实际越野滑雪。
附图说明
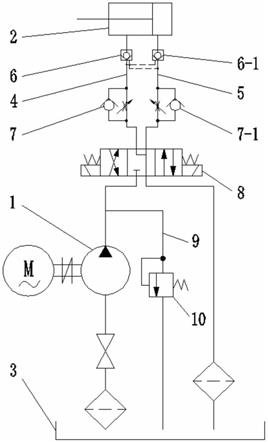
13.图1、2是本套系统中单侧气缸控制子系统的气动原理示意图;
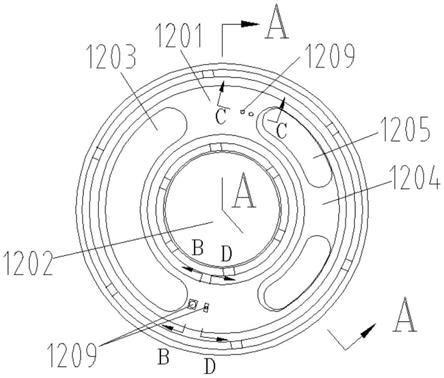
14.图3是所述机械式无杆气缸10侧面的结构示意图;
15.图4是站姿越野滑雪运动员及残疾人坐式越野滑雪运动员在本套系统上的撑杆、回程过程示意图;
16.图5是使用本套系统的动作流程图;
17.图中:10
‑
机械式无杆气缸、20
‑
前腔供/排气支路、21
‑
调压阀、30
‑
后腔供气支路、31
‑
节流阀、32
‑
单向阀、40
‑
背压控制模块、41
‑
压力传感器、42
‑
气控背压阀、43
‑
电控比例阀、50
‑
快速排气支路、51
‑
二位二通电磁阀、52
‑
消音器、60
‑
三位五通电磁阀、70
‑
减压阀、80
‑
t型三通接头、90
‑
气源单元、91
‑
气源、92
‑
储气罐、93
‑
冷干机、94
‑
过滤器、100
‑
活塞及滑台、110
‑
液压缓冲器、121
‑
第一磁性开关、122
‑
第二磁性开关、123
‑
第三磁性开关、124
‑
第四
磁性开关、130
‑
减震器。
具体实施方式
18.下面结合附图和实施例对本实用新型提出的一种越野滑雪模拟器气动控制系统的技术方案进行详细说明。
19.本实用新型提出的一种越野滑雪模拟器气动控制系统具有两套相互对称且彼此独立的气动控制子系统,各气动控制子系统结构相同,现以其中一侧的气动控制子系统为例进行说明。
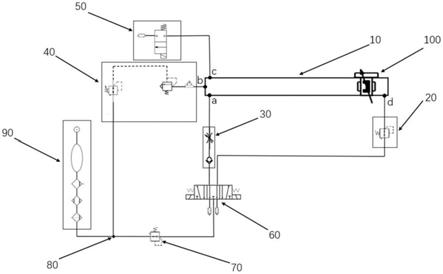
20.参见图1~3,一侧气动控制子系统包括机械式无杆气缸10、气源单元90和背压控制模块40;机械式无杆气缸10作为越野滑雪模拟器中的滑道,由机械式无杆气缸10的活塞和滑台100沿气缸腔体轴向的往复运动来模拟滑雪过程中人体与撑杆落点间的相对运动,且在初始状态时,机械式无杆气缸10的活塞及滑台100位于机械式无杆气缸10的行程前端位置;在回程的前一刻,机械式无杆气缸10的活塞及滑台100位于机械式无杆气缸10上的撑杆行程末端位置;背压控制模块40包括通过管道依次连接的电控比例阀43、气控背压阀42和压力传感器41。机械式无杆气缸10的前后端盖上设有四个气口,第一气口~第三气口(a、b、c)均位于机械式无杆气缸10的后腔端盖上,第四气口d位于机械式无杆气缸10的前腔端盖上。气源单元90的出气口通过依次设有t型三通接头80、减压阀70和三位五通电磁阀60的管道形成主支路,该主支路通过三位五通电磁阀60后形成前腔供/排气支路20和后腔供气支路30分别与机械式无杆气缸10的第四气口d和第一气口a连通,前腔供/排气支路20上设有调压阀21,后腔供气支路30上设有单向阀32和节流阀31;气源单元90的出气口通过t型三通接头80后还形成有与机械式无杆气缸10的第二气口b连通的背压控制支路,所述背压控制模块40设置于该背压控制支路上;机械式无杆气缸10的第三气口c与一快速排气支路50连通,快速排气支路50内设有一二位二通电磁阀51。机械式无杆气缸10的侧壁上沿气缸轴向设有多个磁性开关,通过机械式无杆气缸10活塞的磁环与各磁性开关接触、断开时的信号变化,检测机械式无杆气缸10中活塞的位置从而控制电控比例阀43、三位五通电磁阀60和二位二通电磁阀51的动作。
21.本实用新型实施例中各部件的具体实现方式及功能分别描述如下:
22.气源单元90包括依次连接的气源91、储气罐92、冷干机93和过滤器94。气源91采用低噪音的螺杆式空压机,用于向前腔供/排气支路20、后腔供气支路30和背压控制支路中供应一定压力的气体,以驱动设备运转。储气罐92安装于气源91之后的管路上,利用储气罐92可以降低因气源91(空压机)不连续工作而导致的压力脉动,从而确保供气的充足和平稳。可选地,储气罐92上安装有气压表,用于显示储气罐92中所储存的气体压力大小。冷干机93安装于储气罐92之后的管路上,利用冷干机93冷却和干燥供入后续支路的气体,以延长各气动元件的使用寿命。过滤器94安装于冷干机93之后的管路上,过滤器94用于保证供入后续支路中气体的清洁性,以防止气体中的杂质造成气路堵塞。
23.主支路中,气源单元90的出气口即过滤器94的出气口通过t型三通接头80后先经过减压阀70对主支路中的气源进行稳压,使气源处于恒定状态,减小因气源气压突变时对气动元件的损伤,随后与三位五通电磁阀60的进气口连通。三位五通电磁阀60具有两个工作口,第一工作口与后腔供气支路30的进气口连通,第二工作口与前腔供/排气支路20的一
端连通,机械式无杆气缸10前腔的气体可经由与第四气口d相连的前腔供/排气支路20通过三位五通电磁阀60的排气口排出,为了减小排气时的噪音,三位五通电磁阀60的排气口处设有消音器。
24.后腔供气支路30中,经三位五通电磁阀60第一工作口输送的气体依次通过单向阀32和节流阀32后流入机械式无杆气缸10的第一气口a。单向阀32用于防止气缸后腔中的气体经三位五通电磁阀60排出,即第一气口a仅作为进气口。通过节流阀32调节气缸后腔中气体的压力来调节机械式无杆气缸中活塞及滑台100回程动作的快慢。
25.前腔供/排气支路20中,该支路的两端分别与三位五通电磁阀60的第二工作口和机械式无杆气缸10的第四气口d连通,前腔供/排气支路20上的调压阀21用于调节供入气缸前腔的气体压力大小,气缸前腔内不同的气体压力分别对应不同的撑杆阻力级别。进程时,前腔供/排气支路20通过第四气口d从机械式无杆气缸10供气,回程时,前腔供/排气支路20通过第四气口d向机械式无杆气缸10排气,排出的气体最终由三位五通电磁阀60的排气口排出。
26.背压控制支路中,背压控制模块40包括通过管道依次连接的电控比例阀43、气控背压阀42和压力传感器41。电控比例阀43的进气口通过t型三通接头80与气源单元90的出气口连通,电控比例阀43的出气口与气控背压阀42的第一进气口连通,气控背压阀42的第二进气口经过压力传感器41后与机械式无杆气缸10的第二气口b连通,背压控制支路中管道的管径小于主支路中管道的管径(本实施例中,背压控制支路中的气路元件所接通的气管的管径为4mm,主气路管径为12mm)。所述电控比例阀以外部控制端发送的电信号作为控制信号,用于控制气控背压阀42的背压设定值大小。气控背压阀42用于调节机械式无杆气缸10后腔的气压大小,当机械式无杆气缸10后腔中的气体压力大于背压设定值时,机械式无杆气缸10后腔中的多余的气体会通过第二气口b从气控背压阀42的出气口排出;当机械式无杆气缸10后腔中的气体压力小于或者等于背压设定值时,第二气口b不排气,在机械式无杆气缸10后腔中形成憋压。压力传感器41用于实时监测机械式无杆气缸10后腔中的背压值大小(即机械式无杆气缸10后腔中的气压大小),以便于工作人员进行机械式无杆气缸10后腔背压变化的调试。
27.快速排气支路50中,设有二位二通电磁阀51和消音器52,二位二通电磁阀51的进气口与机械式无杆气缸10的第三气口c连通,消音器52设置于二位二通电磁阀51的排气口处。当机械式无杆气缸10后腔中的气压需要快速下降时(例如,撑杆时,当活塞及滑块100到达某一位置时,所模拟的撑杆阻力需要快速下降时,需要调整气缸后腔中的气压快速下降,而气控背压阀42的出气口排气速度较慢),二位二通电磁阀51动作,将机械式无杆气缸10后腔中的气体全部排出。
28.在机械式无杆气缸10的侧面从前至后依次安装有第一磁性开关121、第二磁性开关122、第三磁性开关123、第四磁性开关124和减震器130,它们在所述机械式无杆气缸10侧面的位置可根据实际需要进行随意调整。其中,各磁性开关用于检测活塞及滑台100的位置,当活塞中的磁环靠近磁性开关时,磁性开关中的触点闭合,产生的电信号传输到外部控制端中,外部控制端根据不同位置的磁性开关信号控制三位五通电磁阀60、电控比例阀43、二位二通电磁阀51动作;当活塞中的磁环离开磁性开关时,磁性开关中的触点断开,电信号消失。减震器130用于阻止活塞及滑台100在撑杆结束后继续向后移动,其位置可根据使用
者越野滑雪的最大撑杆行程进行设定,具有良好的通用性。此外,向机械式无杆气缸10前腔充入一定压力气体可以起到削弱活塞及滑台100向后移动时受到的阻力作用,可以通过改变机械式无杆气缸10前腔中的压力大小来实现撑杆阻力大小的控制,当发生中途脱杆时,机械式无杆气缸10前腔的压力还可以推动滑台继续向后移动,到达行程末端位置。
29.进一步地,由于机械式无杆气缸10的活塞及滑台100回程速度较快,为避免撞坏机械式无杆气缸10的前端盖,在机械式无杆气缸10前端设置液压缓冲器110。该液压缓冲器110可将90%以上的冲击能通过节流孔吸收转化为油热能并散发掉,使高速移动的活塞及滑台100快速制动并静止于起点位置。
30.图4为站姿越野滑雪运动员及残疾人坐式越野滑雪运动员在本套系统上的撑杆、回程过程示意图,图5为使用本套系统的动作流程图。撑杆过程按照图4中
①→②→③
进行,回程过程按照图4中
③→④→①
进行。在撑杆过程中,运动员撑杆推动活塞及滑台100向后移动,依次经第一磁性开关121、第二磁性开关122、第三磁性开关123、第四磁性开关124,并在减震器130的作用下静止在行程末端。在回程过程中,在运动员收杆的同时,活塞及滑台100在气缸后腔气压的推进作用下快速回程并静止于起点位置,准备进入下一撑杆过程。
31.本实用新型一种越野滑雪模拟器气动控制系统的工作过程如下:
32.本套系统在通电通气后,首先,所述三位五通电磁阀60的y1端得电,即三位五通电磁阀60的左侧位通气,来自气源的压缩空气通过管路依次经过单向阀32、节流阀31、机械式无杆气缸10的第一气口a进入气缸后腔,待气缸后腔内气压上升到所需要的气压值后,三位五通电磁阀60的y1端失电、y2端得电,即三位五通电磁阀60的右侧位通气,来自气源的压缩空气经调压阀21进入气缸前腔,使气缸前腔内充满一定压力的气体。此时,机械式无杆气缸10的活塞及滑台100位于气缸前端位置,使用者撑杆推动滑台向后移动,当活塞中的磁环靠近第一磁性开关121所在的位置时,第一磁性开关121中的触点闭合,产生的电信号发送到外部控制端中,然后外部控制端控制电控比例阀43输出在该位置点所设定的气压值到气控背压阀42中,进而控制气缸后腔气压变化;当活塞中的磁环离开第一磁性开关121时,第一磁性开关121中的触点断开,电信号消失。滑台在使用者撑杆作用下继续向后移动,当活塞中的磁环到达第二磁性开关122附近时,外部控制端控制电控比例阀43输出该位置点所设定的气压值到气控背压阀42中,气缸后腔中的气压按照设定继续下降。然后,当活塞中的磁环到达第三磁性开关123附近时,外部控制端控制二位二通电磁阀51动作,快速排气支路50打开,气缸后腔中的气压快速下降。当活塞及滑台100继续向后移动、快到达行程末端时,使用者撑杆结束、滑雪杖从滑台上抬起。
33.当活塞及滑台100到达行程末端时,活塞及滑台100在所述减震器130的作用下停止在第四磁性开关124附近,第四磁性开关124触发电信号发送到外部控制端中,然后外部控制端控制二位二通电磁阀51关闭停止排气、电控比例阀43使气缸后腔形成憋压,然后外部控制端控制三位五通电磁阀60的y2端失电、y1端得电,即三位五通电磁阀60的左侧位通气,来自气源的压缩空气通过管路入气缸后腔,驱动活塞及滑台100依次经过第三磁性开关123、第二磁性开关122、第一磁性开关121快速返回并在起点位置静止,气缸前腔中的气体经前腔供/排气支路20、三位五通电磁阀60排到外界大气中。当机械式无杆气缸10活塞中的磁环到达第一磁性开关121附近时,磁性开关121产生的电信号发送到外部控制端中,然后外部控制端控制三位五通电磁阀60的y1端失电、y2端得电,即三位五通电磁阀60的右侧位
通气,向气缸前腔供入一定压力的气体。同时外部控制端控制电控比例阀43输出起点位置处对应的气压到气控背压阀42中,使机械式无杆气缸10后腔中的气压下降并稳定在初始背压设定值,以模拟越野滑雪撑杆初始阻力。在活塞及滑台100快速回程的同时,使用者将滑雪杖收回,准备进行下一次撑杆。
34.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。