1.本发明主要应用在食品加工领域,实现煎饼果子完全智能化、无人化加工。
背景技术:
2.随着社会的不断进步,城市的规模越来越大,每天在单位和家之间长距离奔波已是普遍现象,为了节省时间,特别是早上,很多人都选择在上班途中解决早餐问题,而煎饼果子因加工时间短,携带方便成了大多数人的选择。然而煎饼果子目前还是处于最原始的加工水平状态,无论是食品的质量还是卫生都无法得到保障,但今天的人们对食品的质量和卫生的在意程度却越来越高。因此急需一款设备,可以提供质量和卫生都有保障的煎饼果子。
技术实现要素:
3.(一)要解决的技术问题本发明提供了一种智能化全自动煎饼果子机器人,实现了煎饼果子完全智能化、无人化加工。
4.(二)技术方案本发明由床身部件、旋转锅部件、油擦部件、摊饼部件、起饼部件、搓饼部件、翻饼部件、薄脆部件、折饼部件、出饼部件、包装部件、辅料部件、机械臂以及电气部件组成。床身部件为整个设备的骨架,其他部件都安装在床身部件上。旋转锅部件实现旋转锅的加热和旋转功能;油擦部件配合机械臂、辅料部件实现旋转锅刷油功能;摊饼部件配合机械臂、辅料部件实现摊饼、摊鸡蛋以及刷酱功能;起饼部件实现将煎饼果子和旋转锅分离的功能;搓饼部件实现将煎饼果子从旋转锅上移动到翻饼部件上的功能;翻饼部件实现将煎饼果子翻转180 度并将煎饼果子再次放到旋转锅上的功能;薄脆部件配合机械臂实现取薄脆、并将薄脆放在煎饼果子上面的功能;折饼部件配合机械臂实现折叠煎饼果子的功能;出饼部件配合机械臂实现将折叠好的煎饼果子放入包装袋的功能;辅料部件提供煎饼果子所需要的各种物料,并配合机械臂及其他部件实现各种物料的添加功能;包装部件实现取袋、拉袋并配合机械臂完成煎饼果子的包装功能。
5.(三)有益效果与现有技术相比,本发明具有以下优点:本发明提供了一种智能化全自动煎饼果子机器人系统,实现了煎饼果子完全智能化、无人化加工。使得煎饼果子的质量和卫生得以保障。
附图说明
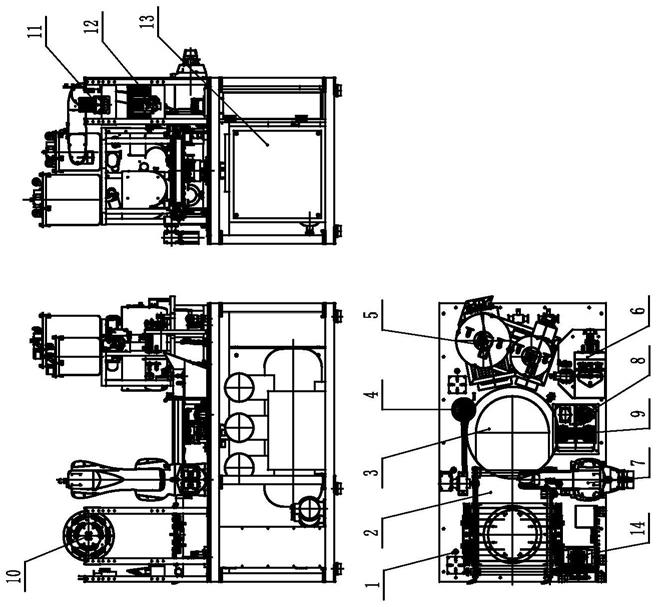
6.图1:煎饼机总图
7.图2:支架
8.图3:起饼部件
9.图4:翻饼部件
10.图5:薄脆部件
11.图6:折饼部件
12.图7:出饼部件
13.图8:辅料部件
14.图9:包装部件
具体实施方式
15.下面结合附图和实施案例,对本发明的具体实施方式进一步详细描述。以下实例用于说明本发明,但不用来限制本发明的范围。
1.本发明是一种主要应用在食品加工领域,实现煎饼果子完全无人化加工的机器人,主要由床身部件(1)、旋转锅部件(3)、油擦部件(8)、摊饼部件(9)、起饼部件(4)、搓饼部件(10)、翻饼部件(2)、薄脆部件(14)、折饼部件(12)、出饼部件(11)、包装部件 (6)、辅料部件(5)、机械臂(7)以及电气部件(13)组成。
2.旋转锅部件(3)安装在床身部件(1)上,旋转锅部件(3)具有旋转、加热、定向停转功能。
16.:支架(15)安装在床身部件(1)上,油擦部件(8)通过支架(15)上的定位孔放在支架(15)上,机械臂(7)从支架(15) 上抓取油擦部件(8),配合旋转锅部件(3)和辅料部件(5)实现旋转锅刷油功能。
17.支架(15)安装在床身部件(1)上,摊饼部件(9)通过支架 (15)上的定位槽放在支架(15)上,机械臂(7)从支架(15)上抓取摊饼部件(9),配合旋转锅部件(3)和辅料部件(5)实现摊饼、摊蛋液以及刷酱功能。
18.起饼部件(4)通过底座(18)安装在床身部件(1)上,起饼刀(17)通过升降搭在旋转锅部件(3)的锅面上,起饼刀(17)和旋转锅部件(3)同时旋转,实现将煎饼果子和旋转锅部件(3)的锅面分离的功能。
19.搓饼部件(10)通过定位槽放置在床身部件(1)上,机械臂 (7)抓取搓饼部件(10),将搓饼部件(10)放置在煎饼果子上面,并推动搓饼部件(10)从旋转锅部件(3)平移到翻饼部件(2)上,从而实现将煎饼果子从旋转锅部件(3)上移动到翻饼部件(2)上的功能。
20.翻饼部件(2)的支腿(19)固定在床身部件(1)上,翻板 (20)可以绕支腿(19)旋转,压杆(21)可上下升降运动,当煎饼果子被移动到翻饼部件(2)的翻板(20)上时,压杆(21)下降,将煎饼果子紧紧压在翻板(20)上,翻板(20)绕支腿(19)旋转,直到翻板(20)搭在旋转锅部件(3)的锅面上,压杆(21)松开,煎饼果子掉落在旋转锅部件(3)的锅面上,从而实现将煎饼果子翻转180度并将煎饼果子再次放到旋转锅部件(3)的锅面上的功能。
21.薄脆部件(14)通过底板(22)固定在床身部件(1)上,薄脆放置在薄脆放置板(23)上,薄脆放置板(23)可以上下升降运动,薄脆吸附组件(24)放置在薄脆上,薄脆吸附组件(24)内含有风机,机械臂(7)抓取薄脆吸附组件(24)时启动薄脆吸附组件 (24)内的风机,通过风机的吸附功能,将薄脆紧紧的吸附在薄脆吸附组件(24)的底面,机械臂(7)将薄脆吸附组件(24)运送到煎饼果子上面,关闭风机,薄脆就掉落在煎饼果子上面,从而实现机械臂(7)取薄脆、并将薄脆放在煎饼果子上面的功能。
22.折饼部件(12)通过定位槽放置在床身部件(1)上,机械臂 (7)抓取折饼部件(12)后,将折饼板(25)插入煎饼果子底面,折饼板(25)通过折饼气缸(26)可以翻转180度,从而实现折叠煎饼果子的功能。
23.出饼部件(11)通过定位槽放置在床身部件(1)上,机械臂 (7)抓取出饼部件(11)后,在夹饼气缸(29)的作用下,夹饼板 2(28)相对夹饼板1(27)张开一定角度,机械臂(7)将夹饼板1 (27)插入折叠好的煎饼果子底面,夹饼板2(28)闭合,将煎饼果子夹紧,并将煎饼果子送到包装袋上方,夹饼板2(28)张开,煎饼果子掉入已拉开的包装袋从而实现将折叠好的煎饼果子放入包装袋的功能。
24.:辅料部件(5)通过辅料支架(33)固定在床身部件(1)上,浆桶(30)里盛有浆液、蛋液桶(31)盛有蛋液,添加液态料(浆、蛋液、酱、油)时,液态辅料上料筒(34)伸出,通过蠕动泵(32),将液态聊添加到旋转锅部件(3)的锅面上并配合机械臂(7)、旋转锅部件实现刷油、摊饼、摊鸡蛋以及刷酱。添加固态物料(葱花、香菜、火腿、生菜)时,固态辅料上料筒(35)伸出,将固态辅料添加到煎饼果子表面,从而实现各种物料的添加功能。
25.包装部件(6)通过底板(36)安装在床身部件(1)上,包装袋盒(37)中存有包装袋,取袋支撑组件(38)具有升降、旋转功能,取袋吸盘组件(39)通过取袋支撑组件(38)的升降、旋转功能,实现从包装袋盒(37)中取袋,拉袋吸盘组件(41)通过拉袋。
技术特征:
1.本发明是一种主要应用在食品加工领域,实现煎饼果子完全无人化加工的机器人,主要由床身部件、旋转锅部件、油擦部件、摊饼部件、起饼部件、搓饼部件、翻饼部件、薄脆部件、折饼部件、出饼部件、包装部件、辅料部件、机械臂以及电气部件组成。其特征在于:实现了煎饼果子完全智能化、无人化加工。2.根据权利要求1所述的一种应用在食品加工领域,实现煎饼果子完全无人化加工的机器人,其特征在于:旋转锅部件实现锅的加热和旋转功能。3.根据权利要求2所述的旋转锅部件,其特征在于:旋转锅可以实现定向停转功能。4.根据权利要求1所述的一种应用在食品加工领域,实现煎饼果子完全无人化加工的机器人,其特征在于:1.油擦部件配合机械臂、辅料部件实现旋转锅刷油功能。2.摊饼部件配合机械臂、辅料部件实现摊饼、摊鸡蛋以及刷酱功能。3.起饼部件实现将煎饼果子和旋转锅分离的功能。4.搓饼部件实现将煎饼果子从旋转锅上移动到翻饼部件上的功能。5.翻饼部件实现将煎饼果子翻转180度并将煎饼果子再次放到旋转锅上的功能。6.薄脆部件配合机械臂实现取薄脆、并将薄脆放在煎饼果子上面的功能。7.折饼部件配合机械臂实现折叠煎饼果子的功能。8.出饼部件配合机械臂实现将折叠好的煎饼果子放入包装袋的功能。9.辅料部件提供煎饼果子所需要的各种物料,并配合机械臂及其他部件实现各种物料的添加功能。10.包装部件实现取袋、拉袋并配合机械臂完成煎饼果子的包装功能。
技术总结
本发明涉及一种智能化全自动煎饼果子机器人,主要应用在食品加工领域,实现煎饼果子完全无人化加工。本发明由床身部件、旋转锅部件、油擦部件、摊饼部件、起饼部件、搓饼部件、翻饼部件、薄脆部件、折饼部件、出饼部件、包装部件、辅料部件、机械臂以及电气部件组成。床身部件为整个设备的骨架。旋转锅部件实现锅的加热功能;油擦部件实现刷油功能;摊饼部件实现摊饼、摊鸡蛋及刷酱功能;起饼部件实现煎饼果子和锅的分离功能;搓饼部件实现煎饼果子平移功能;翻饼部件实现将煎饼果子翻转180度的功能;薄脆部件实现存储薄脆的功能;折饼部件实现折叠煎饼果子的功能;出饼部件实现将煎饼果子放入包装袋的功能;辅料部件提供煎饼果子所需要的各种物料;包装部件实现煎饼果子的包装功能。能。
技术研发人员:于钦伟 秦艳军
受保护的技术使用者:北京途灵微电子科技有限公司
技术研发日:2020.12.24
技术公布日:2021/9/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。