一种摄像头模组微距aa的调焦装置和方法
技术领域
1.本发明属于摄像头模组技术领域,具体属于一种摄像头模组微距aa的调焦装置和方法。
背景技术:
2.为保证摄像头的成像效果,组装过程中会使用aa(active alignment,主动对准制程),确保摄像头各个零部件的精确组装,从而提升摄像头的拍照效果。传统摄像头模组的对焦距离在200mm到无穷远处,对于对焦距离在40mm以下且需要进行aa的摄像头模组,因其对焦距离超出了现有aa设备的制程能力,故无法进行aa操作。
3.综上所述,现有技术中的aa设备无法满足对焦距离小的摄像头模组的生产需求。
技术实现要素:
4.为了解决现有技术中存在的问题,本发明提供一种摄像头模组微距aa的调焦装置和方法,弥补现有aa设备不能满足摄像头微距aa的不足,降低了产品开发阶段的研发成本,满足了产品生产条件。
5.为实现上述目的,本发明提供如下技术方案:
6.一种摄像头模组微距aa的调焦装置,包括aa工作台、线路板、感光芯片、aa胶、镜头组件、aa夹爪和标定chart;
7.所述aa工作台的底部连接有移动装置,用于将aa工作台进行xyz三方向的位置移动;
8.所述aa工作台上放置线路板,所述感光芯片设置在线路板上,感光芯片设置在线路板之间通过金线进行电连接;所述aa胶周向设置在感光芯片外侧的线路板上;
9.所述aa夹爪设置在aa工作台的上方,所述aa夹爪用于夹持镜头组件和线路板通过aa胶进行粘接固定;
10.所述aa夹爪的上方设置有标定chart,用于进行调焦。
11.优选的,所述移动装置包括x向滑动机构、z向滑动机构和y向滑动机构;所述x向滑动机构、z向滑动机构和y向滑动机构之间的滑动方向两两相互垂直;
12.所述x向滑动机构包括x向导轨和x向滑动装置,所述x向导轨设置在地面上,所述x向滑动装置设置在x向导轨上,x向滑动装置和x向导轨之间进行滑动连接,所述x向滑动装置上设置有z向滑动机构;
13.所述z向滑动机构包括z向垂直导轨、z向滑动装置和水平工作台,所述z向垂直导轨设置在x向滑动装置上,所述z向滑动装置设置在z向垂直导轨上,所述z向滑动装置和z向垂直导轨沿竖直方向进行滑动连接;所述z向滑动装置的顶部设置有水平工作台,所述水平工作台上设置有y向滑动机构;
14.所述y向滑动结构包括y向滑动导轨和y向滑动装置,所述y向滑动导轨设置在水平工作台上,所述y向滑动装置设置在y向滑动导轨上,y向滑动装置与y向滑动导轨之间进行
滑动连接;aa工作台设置在y向滑动装置的顶部。
15.进一步的,所述x向导轨、z向垂直导轨和y向滑动导轨上均设置有刻度尺。
16.进一步的,所述z向垂直导轨呈l形,z向垂直导轨的水平端与x向滑动装置相连接,所述z向垂直导轨的竖直端与z向滑动装置进行滑动连接。
17.进一步的,所述z向滑动机构还包括螺杆,所述z向垂直导轨的侧壁上设置有固定座,螺杆穿过水平工作台与固定座进行螺纹连接。
18.优选的,标定chart为mtf chart,sfr chart或者tv
‑
line chart。
19.优选的,所述aa胶的厚度调节范围为20~280um。
20.一种摄像头模组微距aa的调焦方法,基于上述任意一项所述的一种摄像头模组微距aa的调焦装置,包括以下过程,将标定chart放置到aa工作台的极限调焦距离u1位置进行aa操作,将镜头组件进行aa调焦校准,完成校准后,通过物像关系式计算出到达需调焦距离u2位置所需像距的差值δv,然后操作移动装置移动δv的距离,对aa胶进行固化,完成镜头组件和感光芯片的相对位置的固定。
21.优选的,所述物像关系式为:
22.1/f=1/u 1/v;
23.式中,f为镜头焦距;u为物距;v为像距。
24.进一步的,当调焦距离为u1位置时,像距v1=f*u1/(u1
‑
f);
25.当调焦距离为u2位置时,像距v2=f*u2/(u2
‑
f);
26.所述像距差δv=f*u2/(u2
‑
f)
‑
v1=f*u1/(u1
‑
f)。
27.与现有技术相比,本发明具有以下有益的技术效果:
28.本发明提供一种摄像头模组微距aa的调焦装置,通过在aa工作台的底部设置移动装置,将aa工作台进行xyz三方向的位置移动,将标定chart置于镜头组件的上方,利用光学物像公式计算,计算需要移动aa工作台的距离,完成等同距离下的aa操作,来弥补现有aa设备不能满足摄像头微距aa的不足,降低了产品开发阶段的研发成本,满足了产品生产条件。
29.进一步的,通过x向滑动机构、z向滑动机构和y向滑动机构形成移动装置,使得aa工作台能够进行xyz三方向的滑动,并且设置刻度尺,方便控制移动距离,提高精准度。
附图说明
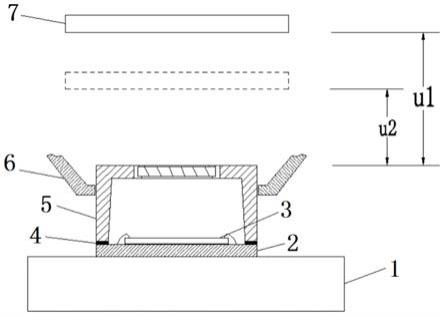
30.图1为本发明一种摄像头模组微距aa的调焦装置结构示意图;
31.图2为本发明物像关系的结构示意图;
32.图3为本发明移动装置结构示意图;
33.附图中:1为aa工作台;2为线路板;3为感光芯片;4为aa胶;5为镜头组件;6为aa夹爪;7为标定chart;8为y向滑动装置;9为y向滑动导轨;10为水平工作台;11为z向滑动装置;12为x向滑动装置;13为x向导轨;14为螺杆;15为z向垂直导轨。
具体实施方式
34.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
35.本发明提供一种摄像头模组微距aa的调焦装置,包括aa工作台1、线路板2、感光芯
片3、aa胶4、镜头组件5、aa夹爪6和标定chart7;aa工作台1的底部设置有移动装置,用于将aa工作台1进行xyz三方向的运动调节;aa工作台1上放置线路板2,感光芯片3贴附到线路板2上,感光芯片3设置在线路板2之间通过金线进行电连接;aa胶4周向设置在感光芯片3外侧的线路板2上;aa夹爪6设置在aa工作台1的上方,aa夹爪6用于夹持镜头组件5放置在线路板2上进行真空吸附;aa夹爪6的上方设置有标定chart7,用于进行调焦。将画完aa胶4的摄像头半成品放置到aa工作台1上进行真空吸附,aa夹爪6用于夹持镜头组件5和线路板2通过aa胶4进行粘接固定,放置到感光芯片3上方,标定chart7置于镜头组件5的上方。
36.需要的调焦距离u2,小于aa机台的极限调焦距离u1。先将标定chart7放置到u1位置进行aa操作,完成校准后,通过物像关系计算出到达u2距离所需像距的差值δv,然后操作移动装置沿z向下压aa工作台1δv的距离,最后对aa胶4进行uv固化,完成镜头组件5和感光芯片3的相对位置的固定。
37.本发明提供的一种摄像头模组微距aa的调焦装置,通过在aa工作台1的底部设置移动装置,将aa工作台1进行xyz三方向的位置移动,将标定chart7置于镜头组件5的上方,利用光学物像公式计算,计算需要移动aa工作台的距离,完成等同距离下的aa操作,来弥补现有aa设备不能满足摄像头微距aa的不足,降低了产品开发阶段的研发成本,满足了产品生产条件。
38.实施例
39.如图1所示,本发明的一种摄像头模组微距aa的调焦装置,感光芯片3贴附到线路板2上,并通过金线和线路板2进行电连接,aa胶4提前均匀地画好在线路板2的四周,aa胶4的厚度可以达到300um,可调高度为20~280um。将画完aa胶4的摄像头半成品放置到aa工作台1上进行真空吸附,aa工作台1可带动感光芯片3进行xyz三方向的运动调节。aa夹爪6夹取镜头组件5,放置到感光芯片3上方,aa夹爪6可带动镜头进行φx,φy,φz三角度的旋转调节。标定chart7置于镜头组件5的上方,标定chart7可以是mtf chart,sfr chart或者tv
‑
line chart。aa机台的极限近处位置距离为u1,在u1距离下,将摄像头模组进行aa调焦校准,aa校准为摄像头工艺的常规制程,此处不再详细赘述。通过物像关系计算出到达u2距离所需像距的差值δv,然后下压aa工作台1δv的距离,完成实际上在u1距离下的aa调焦,最后对aa胶4进行uv固化,固定住镜头组件5和感光芯片3的相对位置。
40.本发明一种摄像头模组微距aa的调焦方法,包括以下过程,将标定chart7放置到aa工作台1的极限调焦距离u1位置进行aa操作,将镜头组件5进行aa调焦校准,完成校准后,通过物像关系式计算出到达需调焦距离u2位置所需像距的差值δv,然后操作移动装置移动δv的距离,对aa胶4进行固化,完成镜头组件5和感光芯片3的相对位置的固定。
41.如图2所示,为光学物像关系的结构示意图,通过高斯物像公式:1/f=1/u 1/v,f为镜头焦距,u为物距,v为像距,可得:当调焦距离为u1时,像距v1=f*u1/(u1
‑
f);当调焦距离为u2时,像距v2=f*u2/(u2
‑
f)。此时像距差δv=f*u2/(u2
‑
f)
‑
v1=f*u1/(u1
‑
f)。举例为:镜头的焦距f为1mm,aa设备的极限调焦距离u1为40mm,要求的调焦距离u2为25mm。在极限调焦距离40mmaa完成后,高斯物像公式计算所对应的像距为v1=1*40/(40
‑
1)≈1.026mm。要求的调焦距离u2所对应的像距v2=1*25/(25
‑
1)≈1.042mm。像距差δv=v2
‑
v1=1.042
‑
1.026=0.016mm=16um。aa工作台1带动摄像头半成品在z方向下压δv=16um的距离,此时可等效的看成是在实际要求的u2=25mm距离进行的aa操作。
42.如图3所示,移动装置包括x向滑动机构、z向滑动机构和y向滑动机构;x向滑动机构、z向滑动机构和y向滑动机构之间的滑动方向两两相互垂直。
43.x向滑动机构包括x向导轨13和x向滑动装置12,x向导轨13设置在地面上,x向滑动装置12设置在x向导轨13上,x向滑动装置12和x向导轨13之间进行滑动连接,x向滑动装置12上设置有z向滑动机构;z向滑动机构包括z向垂直导轨15、z向滑动装置11和水平工作台10,z向垂直导轨15设置在x向滑动装置12上,z向滑动装置11设置在z向垂直导轨15上,z向滑动装置11和z向垂直导轨15沿竖直方向进行滑动连接;z向滑动装置11的顶部设置有水平工作台10,水平工作台10上设置有y向滑动机构;y向滑动结构包括y向滑动导轨9和y向滑动装置8,y向滑动导轨9设置在水平工作台10上,y向滑动装置8设置在y向滑动导轨9上,y向滑动装置8与y向滑动导轨9之间进行滑动连接。
44.x向导轨13、z向垂直导轨15和y向滑动导轨9上均设置有刻度尺。z向垂直导轨15呈l形,z向垂直导轨15的水平端与x向滑动装置12相连接,z向垂直导轨15的竖直端与z向滑动装置11进行滑动连接。z向滑动机构还包括螺杆14,z向垂直导轨15的侧壁上设置有固定座,螺杆14穿过水平工作台10与固定座进行螺纹连接。
45.本发明提供一种aa的调焦方法,利用光学物像公式计算,来弥补现有aa设备不能满足摄像头微距aa的不足,降低了产品开发阶段的研发成本,满足了产品生产条件,赢得了客户的认可。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

