1.本实用新型涉及机械臂领域,具体地说是一种流线型外壳包络的关节。
背景技术:
2.自从机器人问世以来,其技术发展日新月异,并且综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种学科的研究成果,应用范围非常广泛,特别是机械臂领域,在各行各业中都有它的身影,比如在农业领域,水果采摘机械臂帮助农民高效而快速的收获果实,在工业领域,机械臂精准将汽车零部件组装成一辆完整的汽车,在医疗领域,机械臂可以帮助医生完成某些需要精准操作的手术任务,在空间站上,机械臂帮助宇航员完成诸多舱内作业及舱外作业,如此等等。
3.机械臂技术的核心硬件技术是关节设计技术,机械臂的本质是关节的串联组成体,关节的好坏直接影响机械臂的运作可靠性,一个机构简单、可靠性强、适应性高、方便组装及维护成本低的关节无疑会使得机械臂具有更加实际的应用价值,因此关节技术的研究意义十分重大。
4.在过去的十几年中,很多科研工作者为推进关节设计技术做出了贡献,然而关于流线型外壳包络的关节设计成果却少之又少。流线型外壳虽然极具美观性,但也为关节设计增加了困难,如何利用并协调流线型外壳的内部空间设计一款安装方便、连接固定可靠、维护方便、结构紧凑、外形美观的流线型外壳包络的关节,是需要攻克的技术难题。
技术实现要素:
5.本实用新型的目的在于提供一种流线型外壳包络的关节,关节结构新颖,内部空间利用率高,外形美观,并且关节内部零部件的安装定位与流线型外壳协调匹配。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种流线型外壳包络的关节,包括流线型外壳模块、力矩输入模块和力矩输出模块,其中流线型外壳模块包括主动曲面连杆外壳和被动曲面连杆外壳,所述主动曲面连杆外壳与被动曲面连杆外壳连接一端形成安装部,且所述安装部内设有第一固定架和第二固定架,所述力矩输入模块包括电机组件和力矩输入轴,且所述力矩输入轴一端转动安装于所述第一固定架上、另一端转动安装于所述第二固定架上,电机组件设于所述第一固定架和第二固定架之间,所述力矩输出模块包括波发生器、柔轮、刚轮、力矩输出轴和第三固定架,波发生器、柔轮和刚轮设于第三固定架一端,且波发生器与所述力矩输入轴连接,柔轮套设于波发生器上,刚轮套设于柔轮上,所述第三固定架) 和刚轮固装于所述第二固定架上,力矩输出轴可转动地设于所述第三固定架中且一端与所述柔轮固连,另一端与所述被动曲面连杆外壳固连。
8.所述主动曲面连杆外壳转弯部设有第一开槽,且所述第一开槽上设有主动曲面连杆端盖,所述被动曲面连杆外壳转弯部设有第二开槽,且所述第二开槽上设有被动曲面连杆端盖。
9.所述电机组件包括电机定子、电机动子和动子力矩传递件,所述电机定子外圆周面与所述安装部内壁固连,电机动子可转动地设于电机定子中,力矩输入轴穿过所述电机动子,且所述电机动子与力矩输入轴之间通过动子力矩传递件连接。
10.所述力矩输入轴一端通过角接触球轴承a安装于所述第一固定架中、另一端通过角接触球轴承b安装于所述第二固定架中,所述力矩输入轴上设有套筒,且所述套筒设于所述动子力矩传递件和角接触球轴承b之间。
11.所述第三固定架远离所述波发生器一端设有支撑所述力矩输出轴的交叉滚子轴承,且所述交叉滚子轴承远离所述波发生器一侧设有固定环a和锁紧螺母,其中所述固定环a固设于第三固定架中,所述锁紧螺母固设于所述力矩输出轴上。
12.所述第三固定架中设有检测模块,所述检测模块包括编码器动子和编码器定子,且所述编码器动子与所述锁紧螺母固连,所述编码器定子与所述第三固定架固定。
13.所述第一固定架中设有驱动与制动模块,所述驱动与制动模块包括制动块内盘、制动块外盘、制动器和驱动器,所述制动块内盘与所述力矩输入轴固定并嵌入所述制动块外盘中,所述制动块外盘设于所述制动器的定块与动块之间,所述制动器一侧设有驱动器。
14.所述安装部内设有供电通讯布线管道,且所述供电通讯布线管道穿过所述力矩输入轴和力矩输出轴,所述制动器和驱动器均设有引线用的通孔。
15.所述力矩输出轴与设于被动曲面连杆外壳内的法兰固连,所述供电通讯布线管道包括布线管和固定环b,所述布线管内部中空且一端与所述制动块内盘间隙配合,另一端与所述固定环b固接,所述固定环b与设于被动曲面连杆外壳中的法兰固连。
16.所述波发生器一侧通过波发生器力矩输入法兰与所述力矩输入轴固接。
17.本实用新型的优点与积极效果为:
18.1.本实用新型关节外壳采用了流线型设计理念,主动曲面连杆外壳与被动曲面连杆外壳之间等曲率衔接,封闭性好、外形美观。
19.2.本实用新型主动曲面连杆外壳与被动曲面连杆外壳共同包络关节内部零部件,结构非常紧凑,空间利用率高,适合小巧关节的应用场景。
20.3.本实用新型的主动曲面连杆外壳与被动曲面连杆外壳连接端内部都设置有圆柱形安装部,其与内部零部件安装可靠,同轴度高,保证了关节旋转的精度。
21.4.本实用新型主动曲面连杆外壳与被动曲面连杆外壳都设置了安装开槽,结合固定架的设计,零部件从安装开槽有序放入即可方便的完成安装,维护非常方便。
22.5.本实用新型力矩输入轴与力矩输出轴都采用了功能段的设计理念,集成了多种功能,最大化减少了冗余零部件的设计,增加了关节结构的紧凑性,力矩输入轴与力矩输出轴除了周向扭矩自身承担外,其它方向受到的力与力矩都通过中间零部件传递至流线型外壳,具有良好的受力环境。
23.6.本实用新型关节整体采用中空设计,利于内部电源线与通信线的引出。
24.7.本实用新型关节设计具有通用性,当关节物理特性参数发生变化时,关节内部零部件的组织结构可以不发生变化,只需要适当改变零部件的尺寸即可。
附图说明
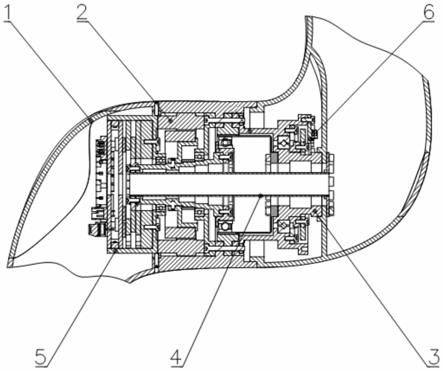
25.图1为本实用新型的内部结构剖视图;
26.图2为基于本实用新型的外肢体机械臂示意图;
27.图3为本实用新型的整体外观示意图;
28.图4为图3中的流线型外壳模块爆炸视图;
29.图5为图4中的流线型外壳模块连杆外壳设计示意图;
30.图6为图1中的力矩输入模块剖视图;
31.图7为图6中的力矩输入模块爆炸视图;
32.图8为图1中的力矩输出模块剖视图;
33.图9为图8中的力矩输出模块爆炸视图;
34.图10为图1中的供电通讯布线管道剖视图;
35.图11为图1中的驱动与制动模块爆炸视图;
36.图12为图1中的检测模块剖视图;
37.图13为图12中的检测模块立体图。
38.其中,1为流线型外壳模块,101为主动曲面连杆外壳,1011为安装部,1012为安装孔,1013为第一开槽,102为被动曲面连杆外壳,103为主动曲面连杆端盖,104为被动曲面连杆端盖;2为力矩输入模块,201为电机定子,202为电机动子,203为动子力矩传递件,204为力矩输入轴;3为力矩输出模块,301为波发生器力矩输入法兰,302为波发生器,303为柔轮,304为刚轮,305为力矩输出轴;4为供电通讯布线管道,401为布线管,402为固定环b;5为驱动与制动模块,501为制动块内盘,502为制动块外盘,503为制动器,504为驱动器;6为检测模块,601为编码器动子,602为编码器定子;701为第一固定架,702为套筒,703为角接触球轴承a,704 为角接触球轴承b,705为第二固定架,706为交叉滚子轴承,707为锁紧螺母,708为固定环a,709为第三固定架;8为背负装置;9为人体。
具体实施方式
39.下面结合附图对本实用新型作进一步详述。
40.如图1~13所示,本实用新型包括流线型外壳模块1、力矩输入模块2、力矩输出模块3、供电通讯布线管道4、驱动与制动模块5 和检测模块6,本实用新型整个关节为外肢体机械臂其中一个关节,将关节设计成流线型,与人体更具有亲和力,外形更加美观。流线型关节相互连接,组成外肢体机械臂,外肢体机械臂通过背负装置8与人体9相连,相当于人体的第三条手臂,与人体原有肢体协作作业。
41.所述力矩输入模块2、力矩输出模块3、供电通讯布线管道4、驱动与制动模块5和检测模块6均设于所述流线型外壳模块1中,并且所述流线型外壳模块1为内部各个模块提供安装定位面与安装定位孔。
42.如图3~4所示,所述流线型外壳模块1包括主动曲面连杆外壳 101、被动曲面连杆外壳102、主动曲面连杆端盖103及被动曲面连杆端盖104,其中主动曲面连杆外壳101转弯部设有第一开槽1013,主动曲面连杆端盖103通过热熔胶固定于第一开槽1013上,第一开槽1013沿着关节旋转轴线投影为圆形,第一开槽1013的设计方便了内部模块的安装,主动曲面连杆外壳101与被动曲面连杆外壳102连接一端形成安装部1011,各个模块均设置于所述安装部1011中,所述安装部1011上沿着圆周方向均布有安装孔1012,所述安装部1011 内设有安装端面和安装轴肩,被动曲面连杆外壳102远离主动曲面连杆外壳101一侧的转弯部设
有第二开槽,被动曲面连杆端盖104通过热熔胶固定于第二开槽上,所述第二开槽设计方便从另一端安装内部模块。所述主动曲面连杆外壳101两端和所述被动曲面连杆外壳102 两端均为连接开口,所述主动曲面连杆外壳101远离被动曲面连杆外壳102一端与上一关节连杆连接,所述被动曲面连杆外壳102远离主动曲面连杆外壳101一端与下一关节连杆连接,所述主动曲面连杆外壳101和被动曲面连杆外壳102除了用于包络关节内部模块外,还负责将力矩传递至下一关节连杆,所述被动曲面连杆外壳102与主动曲面连杆外壳101之间端面间隙配合,并通过轴肩实现轴向定位,两者之间可以实现关节旋转运动。两者接合处曲率连续,封闭性好,整个流线型外壳模块1可以通过金属3d打印技术、精密铸造技术及多轴联动加工技术得到其流线型外形,在数字建模阶段,流线型外壳通过三维造型软件放样得到基本外形,抽壳得到壁厚特征,在此基础上添加圆柱形面段、内轴肩及安装孔用于内部零部件的安装与定位,图5 展示了主动曲面连杆外壳101的流线型表面结构线条,这些通过放样技术得到的结构线条曲率连续,外形美观。
43.如图6~7所示,所述力矩输入模块2包括电机组件和力矩输入轴204,且所述力矩输入轴204通过所述电机组件驱动转动,在所述主动曲面连杆外壳101的安装部1011内壁上设有第一固定架701和第二固定架705,且所述力矩输入轴204一端转动安装于所述第一固定架701上、另一端转动安装于所述第二固定架705上,电机组件设于所述第一固定架701和第二固定架705之间。
44.如图6~7所示,所述电机组件包括电机定子201、电机动子202 和动子力矩传递件203,其中电机定子201外圆周面与主动曲面连杆外壳101的安装部1011内壁通过金属胶固定,并且在所述主动曲面连杆外壳101内壁上设有第一固定架701和第二固定架705限定电机定子201轴向位移,电机动子202可转动地设于电机定子201中,力矩输入轴204穿过电机动子202,且所述电机动子202与力矩输入轴 204之间通过动子力矩传递件203连接。所述电机定子201上布置有线圈,线圈通电产生交变电磁场,电机动子202为永磁性材料,且电机动子202在电机定子201内部产生的交变磁场内受到力矩作用产生旋转运动,并通过动子力矩传递件203带动力矩输入轴204转动,从而产生关节运动所需的力矩。所述动子力矩传递件203外侧与电机动子202通过金属胶固定,内侧套装于力矩输入轴204且通过紧定螺钉实现周向固定,另外所述动子力矩传递件203通过套装于所述力矩输入轴204上的套筒702以及所述力矩输入轴的轴肩实现轴向定位。
45.如图6~7所示,所述力矩输入轴204的小直径端与和驱动与制动模块5中的制动块内盘501固定,方便制动抱闸,所述力矩输入轴 204一端通过角接触球轴承a703安装于所述第一固定架701中,所述力矩输入轴204另一端通过角接触球轴承b704安装于所述第二固定架705中,且所述套筒702设于所述动子力矩传递件203和角接触球轴承b704之间,所述力矩输入轴204的大直径端与力矩输出模块 3相接,用于将力矩传递至所述力矩输出模块3。如图1所示,所述力矩输入轴204内部中空,利于安装供电通讯布线管道4中的布线管 401,同时减轻质量,所述布线管401用于将电源线、通信线引出。
46.如图8~9所示,所述力矩输出模块3主要负责放大力矩输入模块2所产生的力矩,其包括波发生器302、柔轮303、刚轮304及力矩输出轴305,其中所述力矩输出轴305可转动地设于第三固定架709 中且与设于被动曲面连杆外壳102内的法兰固连,所述第三固定架709一端设有波发生器302、柔轮303和刚轮304,且所述波发生器 302远离第三固定架709一
侧通过波发生器力矩输入法兰301与力矩输入轴204固接,柔轮303套设于波发生器302上,刚轮304套设于柔轮303上,且所述第三固定架709和刚轮304通过螺钉安装于所述第二固定架705上,由于第二固定架705固设于主动曲面连杆外壳 101内壁上,因此所述第三固定架709和刚轮304也固定,柔轮303 与第三固定架709内的力矩输出轴305固连。力矩输入轴204驱动波发生器302转动并使柔轮303发生形变,引起刚轮304与柔轮303相对错位运动,因为刚轮304固定,柔轮303在波发生器302与刚轮 304的共同约束下最终输出力矩变大,输出旋转速度减小。所述波发生器302、柔轮303及刚轮304发挥谐波减速器作用。
47.如图8~9所示,所述第三固定架709远离所述波发生器302一端设有交叉滚子轴承706套装于所述力矩输出轴305上,所述交叉滚子轴承706远离所述波发生器302一侧设有固定环a708和锁紧螺母 707,所述交叉滚子轴承706通过所述固定环a708和锁紧螺母707限位,其中固定环a708固设于第三固定架709上限定所述交叉滚子轴承706外圈位移,锁紧螺母707固设于力矩输出轴305上限定所述交叉滚子轴承706内圈位移,所述交叉滚子轴承706可以承受各个方向受力,当受到力矩输出轴305传递的力与力矩时,都通过第三固定架 709传递至主动曲面连杆外壳101上。
48.如图10所示,所述供电通讯布线管道4包括布线管401和固定环b402,所述布线管401内部中空,其一端与制动块内盘501间隙配合,另一端与固定环b402通过热熔胶固接,所述固定环b402通过螺钉与设于被动曲面连杆外壳102的法兰固连,这样左侧力矩输入端与布线管401保持相对旋转,右侧力矩输出端带动布线管401一起旋转。
49.如图11所示,所述驱动与制动模块5包括制动块内盘501、制动块外盘502、制动器503和驱动器504,制动块内盘501与所述力矩输入轴204固定,所述制动块内盘501嵌入制动块外盘502中,所述制动块内盘501呈正方形方便与制动块外盘502配合实现制动,制动块外盘502处于制动器503的定块与动块之间,当关节通电时,定块与动块之间的缝隙保证制动块外盘502可以正常旋转,当关节断电时,定块与动块之间产生吸引力,牢牢将制动块外盘502通过摩擦力锁定,进而锁定力矩输入轴204的旋转,力矩输入轴204停止旋转后,关节将保持断电制动的状态,制动器503一侧设有驱动器504,所述驱动器504主要负责功率放大,同时产生交变电流信号,交变电流通过电机定子201线圈后进而产生交变磁场,所述制动器503和驱动器 504固设于第一固定架701中,且所述制动器503和驱动器504也都采用了中空设计,方便引出电源线与通信线。所述制动器503和驱动器504为本领域公知技术。
50.所述检测模块6主要负责力矩输出轴305的位置与速度检测,如图12~13所示,所述检测模块6包括编码器动子601及编码器定子 602,编码器动子601与所述锁紧螺母707的外侧端面通过螺钉固定,进而与所述力矩输出轴305固定,编码器定子602与第三固定架709 固定,当编码器定子602与编码器动子601之间发生转动,通过信号处理可以得到当前关节的位置与速度信息。
51.本实用新型的工作原理为:
52.本实用新型为一种流线型外壳包络的关节,为旋转自由度关节,关节的内部有许多模块组成,具体包括流线型外壳模块1、力矩输入模块2、力矩输出模块3、供电通讯布线管道4、驱动与制动模块5 和检测模块6,其中流线型外壳模块1分为主动曲面连杆外壳101与被动曲面连杆外壳102,外壳负责包络所有关节内部零部件,宏观上看,关节动作时,主动曲面连杆外壳101为定子,被动曲面连杆外壳为102为动子,这一宏观的关节旋转运动主要由
力矩输入模块2与力矩输出模块3完成,力矩输入模块2动力源为电机,电机分为电机定子201与电机动子202,电机定子201在驱动模块作用下产生交变磁场,电机动子202受磁场力作用发生旋转,然而力矩输入模块2产生的旋转运动是高速、低力矩的,需经过力矩输出模块3作用后输出低速、高力矩旋转运动,这个低速、高力矩的旋转运动就是关节的旋转运动,其传递至被动曲面连杆外壳102。
53.本实用新型的供电通讯布线管道4设计方便了电源线与通讯线从一个关节到另一个关节的传递,并且不发生缆线的扭转。
54.另外为了防止关节在断电时不会突然失去扭矩,损害机械臂,本实用新型在关节内部集成了制动模块,制动模块的本质为摩擦制动,关节断电后,制动器503定块与动块将制动块外盘502锁定,进而锁定力矩输入轴204,完成关节制动。
55.为了检测关节的位置与速度,本实用新型在关节内部集成了检测模块6,其本质为绝对式磁电编码器,关节旋转时,编码器动子601 与编码器定子602之间发生相对运动,通过磁电信号处理可以得到当前关节的位置与速度信息。
56.本实用新型设计的流线型关节结构紧凑、安装方便、连接可靠,外形新颖美观,实现了流线型外壳与关节内部零部件的有机结合,为关节设计提供了一种新的设计思路与解决方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

