技术特征:
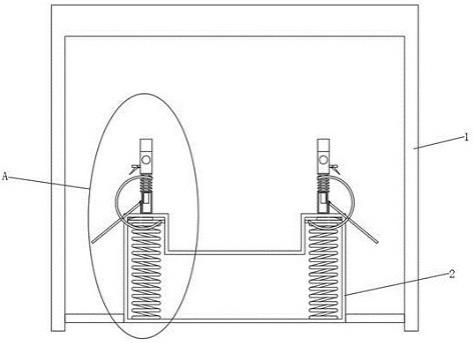
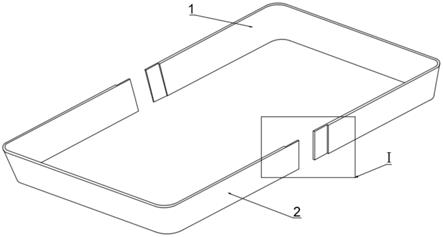
1.一种用于冬季建筑施工的清雪机器人,其特征在于,包括:固定架(1),安装于工程车的车头;铲雪引流模组(2),设置于固定架(1)上并与其固定连接;分离板(3),设置于铲雪引流模组(2)的出料端并与其固定连接,分离板(3)上排列设置有多个开孔(3a);拨动组件(4),有多个,拨动组件(4)用于对铲雪引流模组(2)工作面的雪进行拨动;拨分驱动机构(5),设置于分离板(3)的顶部并与其固定连接,多个拨动组件(4)排列设置于拨分驱动机构(5)的输出端;抽送机构(6),设置于分离板(3)的一面,抽送机构(6)远离铲雪引流模组(2),抽送机构(6)的进料端覆盖多个开孔(3a);侧堆输送机构(7),设置于固定架(1)上,抽送机构(6)的出料端朝向侧堆输送机构(7)的进料端。2.根据权利要求1所述的一种用于冬季建筑施工的清雪机器人,其特征在于,铲雪引流模组(2)包括:斜向板(2a),斜向板(2a)的一端进料端,斜向板(2a)的另一端为出料端,斜向板(2a)的出料端高于其进料端;斜向板(2a)的出料端与分离板(3)的一面固定连接;斜向板(2a)的顶面设有多个导向条(2a1),多个导向条(2a1)等间距排列设置于斜向板(2a)的顶面,并且每两个导向条(2a1)之间的距离等于开孔(3a)的宽度。3.根据权利要求2所述的一种用于冬季建筑施工的清雪机器人,其特征在于,铲雪引流模组(2)还包括:槽口架(2b),槽口架(2b)位于斜向板(2a)的出料端和分离板(3)之间,并且槽口架(2b)分别与斜向板(2a)和分离板(3)固定连接,槽口架(2b)的槽口内设有弧面坡(2b1),弧面坡(2b1)呈高低走向,弧面坡(2b1)的最高端靠近侧堆输送机构(7)的出料端,弧面坡(2b1)的最低端则位于设备的另一侧;加热板(2c),设置于槽口架(2b)的底部,加热板(2c)与电网连接。4.根据权利要求2所述的一种用于冬季建筑施工的清雪机器人,其特征在于,拨动组件(4)包括:拨板(4a),拨板(4a)位于斜向板(2a)中部的上方,拨板(4a)在非工作状态时处于竖直状态,拨板(4a)的两侧分别设有滑槽;支撑架(4b),位于拨分驱动机构(5)的输出端并与其固定连接,支撑架(4b)的两侧分别设有插杆(4b1),支撑架(4b)两侧的插杆(4b1)与拨板(4a)两侧的滑槽滑动连接,并且插杆(4b1)与滑槽也可转动连接;滑块(4c),位于拨板(4a)和支撑架(4b)之间,滑块(4c)与拨板(4a)滑动连接,并且滑块(4c)与支撑架(4b)铰接;扭簧(4d),设置于滑块(4c)与支撑架(4b)的铰接处,扭簧(4d)的两端分别抵触拨板(4a)和支撑架(4b)。5.根据权利要求1所述的一种用于冬季建筑施工的清雪机器人,其特征在于,拨分驱动机构(5)包括:
气缸架(5a),设置于分离板(3)的顶部并与其固定连接;推动气缸(5b),设置于气缸架(5a)上并与其固定连接;推动板(5c),多个拨动组件(4)设置于推动板(5c)的一面,推动气缸(5b)的输出端与推动板(5c)的另一面连接。6.根据权利要求5所述的一种用于冬季建筑施工的清雪机器人,其特征在于,拨分驱动机构(5)还包括:导向杆(5d),导向杆(5d)对称设置于推动板(5c)的两侧,推动板(5c)贯穿气缸架(5a)并与其滑动连接。7.根据权利要求1所述的一种用于冬季建筑施工的清雪机器人,其特征在于,抽送机构(6)包括:收集罩(6a),设置于分离板(3)的一面并且远离铲雪引流模组(2),收集罩(6a)与分离板(3)固定连接并覆盖于其上的多个开孔(3a);三通管(6b),三通管(6b)的进料端与收集罩(6a)的出料端连接,三通管(6b)的出料端朝向侧堆输送机构(7)的工作端,三通管(6b)的进气端与其出料端处于同一轴线;风源组件(6c),设置于三通管(6b)的进气端并与其固定连接。8.根据权利要求7所述的一种用于冬季建筑施工的清雪机器人,其特征在于,风源组件(6c)包括:风管(6c1),风管(6c1)的一端与三通管(6b)的进气端连接,风管(6c1)的另一端设有镂空板;第一伺服电机(6c2),设置于镂空板上并与其固定连接;扇叶(6c3),设置于第一伺服电机(6c2)的输出端并位于风管(6c1)的内部。9.根据权利要求1所述的一种用于冬季建筑施工的清雪机器人,其特征在于,侧堆输送机构(7)包括:底座(7a),设置于固定架(1)上并与其固定连接;第一轮组(7b)和第二轮组(7c),分别设置于底座(7a)的两端并与其固定连接,第一轮组(7b)高于第二轮组(7c);传送带(7d),分别套设于第一轮组(7b)和第二轮组(7c)上,传送带(7d)上等间距设有多个隔条;第二伺服电机(7e),设置于底座(7a)上,第二伺服电机(7e)的输出端与第一轮组(7b)连接。10.根据权利要求9所述的一种用于冬季建筑施工的清雪机器人,其特征在于,第一轮组(7b)和第二轮组(7c)的结构一致,第一轮组(7b)包括:驱动杆(7b1),设置于底座(7a)上并与其可转动连接,第二伺服电机(7e)的输出端与驱动杆(7b1)连接;第一同步轮(7b2)和第二同步轮(7b3),分别设置于驱动杆(7b1)的两端,传送带(7d)的一端套设于第一同步轮(7b2)和第二同步轮(7b3)上。
技术总结
本发明涉及建筑施工清雪设备技术领域,具体是涉及一种用于冬季建筑施工的清雪机器人,包括:固定架,安装于工程车的车头;铲雪引流模组,设置于固定架上并与其固定连接;分离板,设置于铲雪引流模组的出料端并与其固定连接,分离板上排列设置有多个开孔;拨动组件,有多个,拨动组件用于对铲雪引流模组工作面的雪进行拨动;拨分驱动机构,设置于分离板的顶部并与其固定连接,多个拨动组件排列设置于拨分驱动机构的输出端;抽送机构,设置于分离板的一面,抽送机构远离铲雪引流模组,侧堆输送机构,设置于固定架上,抽送机构的出料端朝向侧堆输送机构的进料端,通过本设备的设置,可以将雪和石块进行分离,并且可以将雪进行清理和堆积。并且可以将雪进行清理和堆积。并且可以将雪进行清理和堆积。
技术研发人员:王健友
受保护的技术使用者:王健友
技术研发日:2021.07.17
技术公布日:2021/9/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。