1.本发明属于海洋工程装备技术领域,具体涉及一种面向运动响应抑制的大型浮体间柔性连接桥装置。
背景技术:
2.大型或超大型海上浮体是未来海上机场、海上生产作业平台、海上远洋补给平台等军民装备领域的重要应用方向。因其作业要求的限制,需要长时间在海上部署,必须具备克服波浪运动影响和结构水弹性影响的能力。在设计方案上,目前浮体间连接一般采用多模块连接的技术方案。如美国mob概念平台、远海补给保障基地概念等,都采用的是多模块组合方式,模块间通过一定的装置连接,但是并无公开发表的连接桥技术方案。
3.在海上风浪流的作用下,由于浮体各个模块自身属性的差异,遭遇波浪参数的不同等,导致两个浮体之间的时域运动响应不同,特别表现在运动位移、速度、加速度等。浮体间运动会影响作业环境,目前整体式大型浮体适应海况等级一般不超过5级海况,适应海洋环境能力比较低。
技术实现要素:
4.本发明要解决的技术问题是:提供一种能够保证各浮体间区域互通、抑制浮体间运动特性的大型浮体间柔性连接桥,以有效改善浮体间运动响应,提高作业环境等级,相对目前整体式大型浮体适应海况等级一般不超过5级海况,采用本发明后,远海部署海况适应等级可以提高至6级以上。也可以用于中型或常规浮体间柔性连接。
5.为解决上述技术问题,本发明采用如下技术方案:一种可抑制运动的大型浮体间柔性连接桥,其特征在于包括:可转动地连接在浮体(1)间的承力梁,承力梁由主梁(6)和伸缩梁(4)嵌套连接而成;设置在承力梁上方由滚动体(9)支撑的柔性叠叶(2), 柔性叠叶(2)包括若干叶片,相邻的叶片间具有相互重叠部分,多个柔性叶片排列在一起形成平整的桥面;等距位移装置(5),连接在两个浮体(1)之间并与滚动体(9)关联连接,当两浮体(1)间产生相对运动位移变化时,依据距离变化而等分到每个相关的柔性叠叶(2)的叶片上,同时驱动多个叶片在主梁(6)和伸缩梁(4)上等距离移动实现桥面平整;轴向运动阻尼器(7):采用活塞式液压油缸方式,轴向安装在主梁(6)和伸缩梁(4)之间,用于抵抗或减缓浮体间轴向运动影响,避免两个浮体(1)间产生快速的相对位移;转动阻尼器(3):采用活塞式液压油缸方式,安装在主梁(6)和伸缩梁(4)下方,并在空间上分别斜向支撑在各梁与所在端的浮体(1)之间。
6.上述技术方案中,主梁(6)一端与浮体(1)端部可转动地连接,另一端与伸缩梁(4)嵌套连接。
7.上述技术方案中,主梁(6)和伸缩梁(4)各自和浮体(1)之间均使用球铰(8)可转动
地连接。
8.上述技术方案中,主梁(6)底部设有将两个主梁(6)连接的限位连杆(6.2)。
9.上述技术方案中,主梁(6)上敷设柔性叠叶(2)。
10.上述技术方案中,上述技术方案中,轴向运动阻尼器(7)连杆一端可转动地连接主梁(6)所在端的浮体(1),活塞一端内置在伸缩梁(4)内。
11.上述技术方案中,伸缩梁(4)一端与浮体(1)端部可转动地连接,另一端伸入主梁凹槽(6.1)并在滚动轴承的支撑下进行伸缩运动,伸缩梁(4)上敷设柔性叠叶(2)。
12.上述技术方案中,柔性叠叶(2)下方连接的滚动体(9)为滚轮;滚动体(9)底部与承力梁上表面接触。
13.上述技术方案中,柔性叠叶(2)具有一定弹性并在较小弹性变形时能自动恢复平整状态。
14.上述技术方案中,连接桥长度变化范围15~20米,宽度不小于8米。
15.本发明通过主梁和伸缩梁以及阻尼器控制海上浮体间的相互运动,并通过设置带滚轮柔性叠叶形成平滑通道,方便浮体间的飞机、车辆、物资、人员相互转运,不仅较好地解决了海上多模块间的连接问题,又可有效抑制浮体间运动响应,提高海上作业环境等级,具有方案创新性和较高应用价值。
16.可连接多个独立的模块,在实现连接功能、保证结构强度的同时,能够在一定范围内适应相连两个模块的相对运动,并具有阻尼功能,起到抑制相对运动的作用。可用于海上大型浮体(如海上机场、大型多体海洋平台)各模块间的连接,在民用和军用领导都有较大应用价值。确保海上大型浮动式结构物的工作和生产安全。
17.相对目前整体式大型浮体适应海况等级一般不超过5级海况,采用本发明后,远海部署海况适应等级可以提高至6级以上。也可以用于中型或常规浮体间柔性连接。
18.附图说明
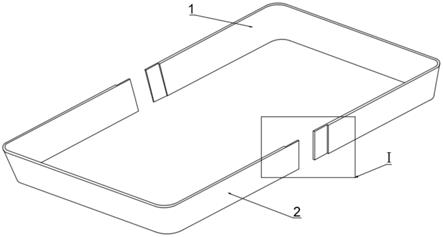
19.图1为根据本发明实施的可抑制运动的大型浮体间柔性连接桥俯视图。
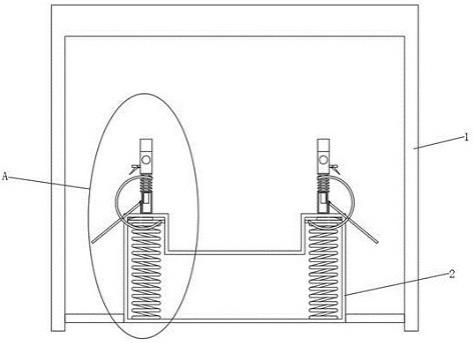
20.图2为根据本发明实施的可抑制运动的大型浮体间柔性连接桥侧视图及主要部件组成图(包括:带滚轮柔性叠叶、等距位移装置、转动阻尼器等)。
21.图3为本发明可抑制运动的大型浮体间柔性连接桥的主梁、伸缩梁俯视图(包括轴向运动阻尼器、转动阻尼器)。
22.图4为本发明可抑制运动的大型浮体间柔性连接桥的主梁、伸缩梁轴向剖面图。
23.图5为本发明可抑制运动的大型浮体间柔性连接桥的带滚轮柔性叠叶、等距位移装置组成细节图。
24.具体实施方式
25.如图1
‑
5所示,本发明可抑制运动的大型浮体间柔性连接桥整个连接桥结构主要包括由主梁6和伸缩梁4嵌套连接的承力梁、带滚轮柔性叠叶2、等距位移装置5、轴向运动阻尼器7、转动阻尼器3。各部件结构和功能如下:
主梁6:为连接浮体1间的主要承力结构部分,主梁6一端与浮体1端部通过球铰8铰接,另一端与伸缩梁4嵌套连接,主梁6底部设有限位连杆6.1。主梁6上敷设柔性叠叶2,作为柔性叠叶2滑块运动导轨,同时起到约束柔性叠叶2滑块运动的功能;伸缩梁4:为连接浮体1间的主要承力结构部分,伸缩梁4一端与浮体1端部铰接,另一端伸入主梁凹槽6.1,在滚动轴承(图4中设置在伸缩梁4和主梁6之间的间隙中)的支撑下进行伸缩运动,伸缩梁4上敷设柔性叠叶2;带滚轮柔性叠叶2:敷设在浮体1间的连接承力梁(主梁6和伸缩梁4)上,滚轮9底部与承力梁上表面接触,相邻的叶片间具有相互重叠部分,多个柔性叠叶排列在一起成平整的桥面,实现浮体间的区域互通;柔性叠叶主要承载车辆重量和人员重量,设计时可留有强度余量,并具有一定弹性,产生较小的变形可以自动恢复,不会对使用造成影响,如果因特殊外力导致大范围变形,可随时更换叶片。
26.等距位移装置5:与浮体1两端部连接,如图2和5所示,等距位移装置5呈现伸缩式栅栏结构,各栅栏杆间隔设置的上顶部为支撑点,各支撑点与带滚轮柔性叠叶2下方间隔设置的滚轮9一一连接而关联所在的柔性叶片,当两浮体1间产生相对运动位移变化时,依据距离变化而等分到每个相关的柔性叶片上,同时驱动多个柔性叶片在主梁6和伸缩梁4上等距离移动,实现桥面平整;轴向运动阻尼器7:采用活塞式液压油缸方式,安装在主梁6和伸缩梁4之间,如图3所示,轴向运动阻尼器7的连杆一端球铰接在主梁6所在端的浮体1,活塞一端内置在伸缩梁4内,用于抵抗或减缓浮体间轴向运动影响,避免两个浮体1间产生快速的相对位移;转动阻尼器3:采用活塞式液压油缸方式,安装在主梁6和伸缩梁4下方,空间上分别斜向支撑在主梁6与浮体1之间以及伸缩梁4与浮体1之间,当两个浮体1间产生水平转动或垂向弯曲时,可以有效抵抗浮体的运动,避免产生较大的转角,起到限位的作用效果,确保承力梁上方的柔性叠叶2保持平滑状态。
27.主梁6、伸缩梁4各自和浮体1之间均使用球铰8连接,同时能够适应两个浮体1相对横向位置、相对角度变化。
28.为方便车辆通行,设计典型本发明可抑制运动的大型浮体间柔性连接桥整个连接桥长度变化范围15~20米,宽度不小于8米。其他尺寸方案可以按照浮体尺寸需求进行设计。
29.本发明可抑制运动的大型浮体间柔性连接桥整个连接桥工作原理如下:(1)当两个浮体1有相对离开运动时,与两个浮体1分别相接的主梁6和伸缩梁4两端距离拉长,于是等距位移装置5运动,同时轴向运动阻尼器7被拉伸,起到运动抑制效果。等距位移装置5驱动与之相连的各柔性叠叶滚轮8转动,带动各柔性叠叶2产生相对移动,间距变大并保持平滑,确保了整个连接桥发生整体伸长,保障桥面平整。
30.(2)当两个浮体1相互靠近时,各装置反向运动,原理同上述(1)。
31.(3)当两个浮体1有相对水平旋转运动时,主梁6和伸缩梁4两端的球铰8可迅速适应这种运动变化;水平运动引起主梁和伸缩梁两端距离的变化,进而产生如上述(1)中所述的工作过程。同时在两个浮体1有相对旋转运动时,浮体底部斜撑的转动阻尼器3一边被拉长,一边被压缩,可双倍施加阻尼作用,起到转动抑制效果。
32.(4)当两个浮体1有垂向相对弯曲变化时,主梁和伸缩梁两端的球铰8可迅速适应这种运动变化,垂向相对弯曲引起主梁和伸缩梁两端距离的变化,进而产生如上述(1)中所
述的工作过程。同时浮体底部斜撑的转动阻尼器3施加阻尼作用,起到转动抑制效果。
33.以上的仅为本发明的较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等效变化,仍属本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。