1.本发明涉及摊铺机技术领域,具体而言,涉及一种摊铺厚度的获取方法、装置、摊铺机和可读存储介质。
背景技术:
2.相关技术中,摊铺机的摊铺厚度检测中,可以通过专芯取样、增加超声波传感器或者雷达传感器测量装置或采用大臂油缸伸缩量和角度作为变量进行检测,专芯取样的方式,效率低,随机性高,检测仪器精度不高,而且对路面的损害有一定影响,具有破坏性,增加超声波传感器或者雷达传感器测量装置或采用大臂油缸伸缩量和角度作为变量进行检测的方式,需要额外增加设备,成本较高。
技术实现要素:
3.本发明旨在解决或者改善上述技术问题的至少之一。
4.为此,本发明的第一目的在于提供一种摊铺厚度的获取方法。
5.本发明的第二目的在于提供一种摊铺厚度的获取装置。
6.本发明的第三目的在于提供一种摊铺厚度的获取装置。
7.本发明的第四目的在于提供一种摊铺机。
8.本发明的第五目的在于提供一种可读存储介质。
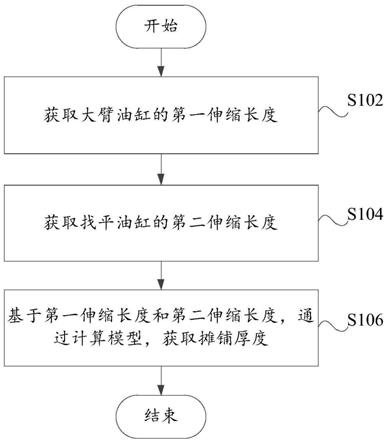
9.为实现本发明的第一目的,本发明的技术方案提供了一种摊铺厚度的获取方法,用于摊铺机,摊铺机包括机架、设在机架后侧的熨平板、大臂、找平油缸和大臂油缸,大臂的一端与机架连接,大臂的另一端与熨平板连接,找平油缸的一端与机架铰接,找平油缸的另一端与机架铰接,大臂油缸的一端与机架铰接,大臂油缸的另一端与机架铰接,获取方法包括:获取大臂油缸的第一伸缩长度;获取找平油缸的第二伸缩长度;基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
10.本技术方案可以实时监控大臂油缸、找平油缸的伸缩长度,不受周围环境的影响,适用于各种工况,保证最终获取的摊铺厚度的精度。
11.另外,本发明提供的技术方案还可以具有如下附加技术特征:
12.上述技术方案中,基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度,具体包括:获取大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的投影点f之间的连线df的长度;根据第一伸缩长度、第二伸缩长度、大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的第一投影点f之
间的连线df的长度,获得摊铺厚度;其中,大臂长度为找平油缸下铰接点b与大臂油缸下铰接点c之间的连线bc的长度,第一伸缩长度为找平油缸上铰接点a与找平油缸下铰接点b之间的连线ab的长度,第二伸缩长度为大臂油缸上铰接点d与大臂油缸下铰接点c之间的连线dc的长度,熨平板后沿l位于熨平板后端面与底端面的相交位置,参考面为摊铺机的行走机构的工作路面。
13.本技术方案根据实时的第一伸缩长度和第二伸缩长度获取实时的摊铺厚度,进而实现对摊铺路面的厚度的实施监控。
14.上述任一技术方案中,获得摊铺厚度,具体包括:在三角形adb中,已知ab长度、ad长度和∠bad角度,采用余弦定理得到bd长度;在三角形bdc中,已知bd长度、dc长度和cb长度,采用余弦定理得到∠bdc角度;在三角形adb中,已知ab长度、bd长度和∠bad角度,采用正弦定理得到∠adb角度;在梯形agfd中,已知∠gad角度,得到∠adf角度,计算得到∠fdc角度,其中,g为a在参考面上的第二投影点;在三角形bdc中,已知bd长度、dc长度和cb长度,采用余弦定理得到∠dbc角度;在三角形bcl中,已知bc长度、cl长度和bl长度,采用余弦定理得到∠cbl角度,进而得到∠dbl角度;在三角形bdl中,已知bd长度、bl长度和∠dbl角度,采用余弦定理得到dl长度;在三角形dcl中,已知dc长度、cl长度和dl长度,采用余弦定理得到∠cdl角度,∠ldf=∠cdl ∠fdc;获取摊铺厚度,le=df
‑
dl
×
cos∠ldf,其中,le表示摊铺厚度,熨平板后沿l在参考面的投影为第三投影点e。
15.本技术方案依据摊铺机模型中的铰接点和参考点,构建铰接点与参考点的几何关系,得到点与点之间的距离,最终获取摊铺厚度,计算过程简单。
16.上述任一技术方案中,在获取找平油缸的第一伸缩长度之前,获取方法还包括构建计算模型,具体包括:获取找平油缸下铰接点b与大臂油缸下铰接点c之间的第一长度bc;获取找平油缸上铰接点a与大臂油缸上铰接点d之间的第二长度ad;获取第一线段与找平油缸之间的第一夹角,其中,找平油缸上铰接点a与大臂油缸上铰接点d的连线为第一线段;获取找平油缸下铰接点b与熨平板后沿l之间的第三长度bl;获取大臂油缸下铰接点c与熨平板后沿l之间的第四长度cl;获取大臂油缸上铰接点d与第一投影点f之间的第五长度df;设定第一伸缩长度和第二伸缩长度为自变量;设定摊铺厚度为因变量,其中,摊铺厚度为熨平板后沿l与第三投影点e之间的第六长度le;基于第一长度、第二长度、第三长度、第四长度、第五长度、第一夹角、第一伸缩长度、第二伸缩长度和摊铺厚度,构建计算模型的函数表达式。
17.本技术方案通过计算模型进行计算,无需增加其他设备,不会产生额外成本。并且,计算模型不受周围环境中噪声和光线的影响,准确度高。
18.上述任一技术方案中,构建计算模型的函数表达式,具体包括:
19.l6=l5‑
l8×
cosα
10
;
20.其中,l6表示摊铺厚度,l5表示第五长度,l8表示大臂油缸上铰接点与熨平板后沿l之间的第八长度,α
10
表示∠fdl;
21.l
82
=l
72
l
32
‑
2l7l3cosα8;
22.l
72
=l
22
l
12
‑
2l2l1cosα1;
23.α8=α6 α7;
[0024][0025][0026][0027]
α
10
=α9 α5;
[0028][0029]
α5=α3 α2‑
α4;
[0030][0031][0032]
α4=180
°‑
α1;
[0033]
其中,l1表示第一长度,l2表示第二长度,l3表示第三长度,l4表示第四长度,l7表示找平油缸下铰接点b与大臂油缸上铰接点d之间的第七长度,l1表示第一伸缩长度,l2表示第二伸缩长度,α1表示∠bad,α2表示∠bdc,α3表示∠adb,α4表示∠adf,α5表示∠fdc,α6表示∠dbc,α7表示∠cbl,α8表示∠dbl,α9表示∠cdl。
[0034]
本技术方案通过给出函数表达式的具体形式,使得更加简便的获取摊铺厚度。
[0035]
上述任一技术方案中,获取方法还包括以下步骤:在摊铺机进行摊铺之前,调整熨平板的仰角到位,计算获取摊铺厚度需要的参数,在摊铺机进行摊铺中,熨平板的仰角固定不变。
[0036]
本技术方案中,在摊铺机进行摊铺中,熨平板的仰角固定不变,简化了计算模型,增加了通过计算模型获取摊铺厚度的可行性。
[0037]
为实现本发明的第二目的,本发明的技术方案提供了一种摊铺厚度的获取装置,包括:第一获取模块、第二获取模块和计算模块;第一获取模块获取大臂油缸的第一伸缩长度;第二获取模块获取找平油缸的第二伸缩长度;计算模块基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
[0038]
本技术方案通过计算模型的方式获取摊铺厚度,无需对路面进行破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。
[0039]
为实现本发明的第三目的,本发明的技术方案提供了一种摊铺厚度的获取装置,包括:存储器和处理器,存储器存储有程序或指令,处理器执行程序或指令;其中,处理器在执行程序或指令时,实现如本发明任一技术方案的摊铺厚度的获取方法的步骤。
[0040]
本技术方案提供的摊铺厚度的获取装置实现如本发明任一技术方案的摊铺厚度的获取方法的步骤,因而其具有如本发明任一技术方案的摊铺厚度的获取方法的全部有益效果,在此不再赘述。
[0041]
为实现本发明的第四目的,本发明的技术方案提供了一种摊铺机,摊铺机包括机架、设在机架后侧的熨平板、大臂、找平油缸和大臂油缸,大臂的一端与机架连接,大臂的另一端与熨平板连接,找平油缸的一端与机架铰接,找平油缸的另一端与机架铰接,大臂油缸的一端与机架铰接,大臂油缸的另一端与机架铰接,还包括:摊铺厚度的获取装置,摊铺厚度的获取装置采用如本发明任一技术方案的摊铺厚度的获取方法,获取大臂油缸的第一伸缩长度和找平油缸的第二伸缩长度,基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
[0042]
本技术方案提供的可读存储介质实现如本发明任一技术方案的摊铺厚度的获取方法的步骤,因而其具有如本发明任一技术方案的摊铺厚度的获取方法的全部有益效果,在此不再赘述。
[0043]
为实现本发明的第五目的,本发明的技术方案提供了一种可读存储介质,可读存储介质存储有程序或指令,程序或指令被执行时,实现上述任一技术方案的摊铺厚度的获取方法的步骤。
[0044]
本技术方案提供的可读存储介质实现如本发明任一技术方案的摊铺厚度的获取方法的步骤,因而其具有如本发明任一技术方案的摊铺厚度的获取方法的全部有益效果,在此不再赘述。
[0045]
本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
[0046]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0047]
图1为相关技术的摊铺机测量装置示意图;
[0048]
图2为相关技术的摊铺厚度的识别装置示意图;
[0049]
图3为根据本发明一个实施例的摊铺厚度的获取方法流程图之一;
[0050]
图4为根据本发明一个实施例的摊铺厚度的获取方法流程图之二;
[0051]
图5为根据本发明一个实施例的摊铺厚度的获取方法流程图之三;
[0052]
图6为根据本发明一个实施例的摊铺厚度的获取方法流程图之四;
[0053]
图7为根据本发明一个实施例的摊铺厚度的获取方法流程图之五;
[0054]
图8为根据本发明一个实施例的摊铺厚度的获取装置示意框图;
[0055]
图9为根据本发明一个实施例的摊铺厚度的获取装置示意框图;
[0056]
图10为根据本发明一个实施例的摊铺机示意框图之一;
[0057]
图11为根据本发明一个实施例的摊铺机示意框图之二;
[0058]
图12为根据本发明一个实施例的计算模型示意图。
[0059]
其中,图1和图2中附图标记与部件名称之间的对应关系为:
[0060]
100’:摊铺机,110’:测量装置,120’:熨平板,130’:部件,140’:参考方向;
[0061]
其中,图8至图12中附图标记与部件名称之间的对应关系为:
[0062]
100:摊铺厚度的获取装置,110:第一获取模块,120:第二获取模块,130:计算模块,200:摊铺厚度的获取装置,210:存储器,220:处理器,300:摊铺机,310:大臂油缸,320:
找平油缸,330:大臂,340:机械仰角调节装置,350:熨平板,400:摊铺厚度的获取装置,a:找平油缸上铰接点,b:找平油缸下铰接点,c:大臂油缸下铰接点,d:大臂油缸上铰接点,e:第三参考点,f:第二参考点,l:第一参考点,g:第四参考点。
具体实施方式
[0063]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
[0064]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0065]
下面参照图1至图12描述本发明一些实施例的摊铺厚度的获取方法、装置、摊铺机和可读存储介质。
[0066]
现有技术中,摊铺机的摊铺厚度检测存在以下几种模式:
[0067]
(1)传统的专芯取样。
[0068]
传统的专芯取样,效率低,随机性高,检测仪器精度不高,而且对路面的损害有一定影响,具有破坏性等特点。
[0069]
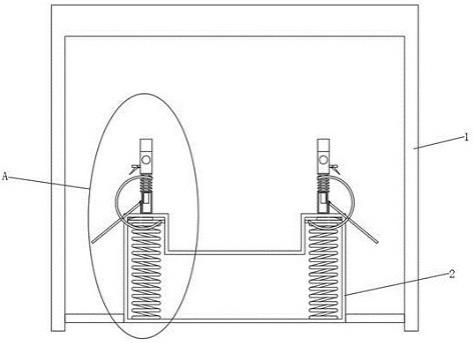
(2)通过增加超声波传感器或雷达传感器,来检测施加材料的厚度。如图1所示,相关技术中可以在摊铺机100’上增加测量装置110’,用于测量新铺路面的实施厚度。
[0070]
增加超声波传感器或者雷达传感器测量装置,受环境影响较大。超声波传感器传输信号声波,受噪音影响较大;雷达传感器传输信号为光波,受温度与光线影响较大。超声波传感器或者雷达传感器测量装置成本极高,单套设备价格约为30万左右。
[0071]
(3)如图2所示,相关技术的摊铺机及其摊铺厚度的识别装置、系统和方法中,摊铺机包括熨平板120’,该熨平板浮动在摊铺物料上,熨平板120’上连接有一部件130’,随着摊铺厚度h的变化,该部件130’与参考方向140’的夹角α发生变化,识别方法包括:接收部件的长度l和夹角α;以及根据长度l和夹角α来计算摊铺厚度h。
[0072]
该相关技术的数学模型与实际摊铺过程存在较大的差异,且增加了角度传感器,滑杆等零件,采用大臂油缸伸缩量和角度作为变量,需要采用多个传感器,成本相对较高。
[0073]
综上,本实施例的目的在于解决或者改善以下问题的至少之一:
[0074]
(1)对摊铺路面的厚度实施监控,且对路面尽量不进行破坏。
[0075]
(2)尽量减少影响精度的条件。
[0076]
(3)降低相关设备成本。
[0077]
实施例1:
[0078]
如图3所示,本实施例提供了一种摊铺厚度的获取方法,用于摊铺机,摊铺机包括机架、设在机架后侧的熨平板、大臂、找平油缸和大臂油缸,大臂的一端与机架连接,大臂的另一端与熨平板连接,找平油缸的一端与机架铰接,找平油缸的另一端与机架铰接,大臂油缸的一端与机架铰接,大臂油缸的另一端与机架铰接,获取方法包括以下步骤:
[0079]
步骤s102,获取大臂油缸的第一伸缩长度;
[0080]
步骤s104,获取找平油缸的第二伸缩长度;
[0081]
步骤s106,基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
[0082]
本实施例中,大臂油缸、找平油缸可以采用磁滞油缸,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,可以理解的是,磁滞油缸为自带位移传感器的油缸,无需增加其他传感器部件,降低获取摊铺厚度的成本,减少增加额外部件,可以减少维修。
[0083]
本实施例中,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,不受周围环境的影响,对噪声以及光线的影响可以忽略不计,适用于各种工况,保证最终获取的摊铺厚度的精度。
[0084]
本实施例中,采用第一伸缩长度和第二伸缩长度作为变量,通过计算模型计算得到摊铺厚度,可以根据实时的第一伸缩长度和第二伸缩长度获取实时的摊铺厚度,进而实现对摊铺路面的厚度的实施监控,通过计算模型的方式获取摊铺厚度,无需对路面进行破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。
[0085]
实施例2:
[0086]
如图4所示,本实施例提供了一种摊铺厚度的获取方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0087]
基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度,具体包括:
[0088]
步骤s202,获取参数;
[0089]
获取大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的第一投影点f之间的连线df的长度;
[0090]
步骤s204,获得摊铺厚度;
[0091]
根据第一伸缩长度、第二伸缩长度、大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的投影点f之间的连线df的长度,获得摊铺厚度;
[0092]
其中,大臂长度为找平油缸下铰接点b与大臂油缸下铰接点c之间的连线bc的长度,第一伸缩长度为找平油缸上铰接点a与找平油缸下铰接点b之间的连线ab的长度,第二伸缩长度为大臂油缸上铰接点d与大臂油缸下铰接点c之间的连线dc的长度,熨平板后沿l位于熨平板的后端且位于熨平板的底端,或者说是位于熨平板的后端面和底端面的相交位置,参考面为摊铺机的行走机构的工作路面,。
[0093]
本实施例中,找平油缸上铰接点、找平油缸下铰接点、大臂油缸下铰接点、大臂油缸上铰接点、第三参考点e(即第三投影点e)、第二参考点f(即第一投影点f)、第四参考点g(即第二投影点g)和第一参考点l(即熨平板后沿l)位于同一平面内。
[0094]
本实施例中,找平油缸上下分别设有铰接点,上铰接点即为a,下铰接点即为b,大臂油缸上下分别设有铰接点,上铰接点即为d,下铰接点即为c,参考面(基准面)可以为摊铺机的行走机构(履带或轮胎等)的工作路面(如果摊铺机的行走机构在地面上,则工作路面为地面)。
[0095]
本实施例中,采用第一伸缩长度和第二伸缩长度作为变量,通过计算模型计算得
到摊铺厚度,可以根据实时的第一伸缩长度和第二伸缩长度获取实时的摊铺厚度,进而实现对摊铺路面的厚度的实施监控,通过计算模型的方式获取摊铺厚度,无需对路面进行破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。
[0096]
实施例3:
[0097]
如图5所示,本实施例提供了一种摊铺厚度的获取方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0098]
获得摊铺厚度,具体包括:
[0099]
步骤s302,在三角形adb中,已知ab长度、ad长度和∠bad角度,采用余弦定理得到bd长度;
[0100]
步骤s304,在三角形bdc中,已知bd长度、dc长度和cb长度,采用余弦定理得到∠bdc角度;
[0101]
步骤s306,在三角形adb中,已知ab长度、bd长度和∠bad角度,采用正弦定理得到∠adb角度;
[0102]
步骤s308,在梯形agfd中,已知∠gad角度,得到∠adf角度,计算得到∠fdc角度;
[0103]
步骤s310,在三角形bdc中,已知bd长度、dc长度和cb长度,采用余弦定理得到∠dbc角度;
[0104]
步骤s312,在三角形bcl中,已知bc长度、cl长度和bl长度,采用余弦定理得到∠cbl角度,进而得到∠dbl角度;
[0105]
步骤s314,在三角形bdl中,已知bd长度、bl长度和∠dbl角度,采用余弦定理得到dl长度;
[0106]
步骤s316,在三角形dcl中,已知dc长度、cl长度和dl长度,采用余弦定理得到∠cdl角度;
[0107]
∠ldf=∠cdl ∠fdc;
[0108]
步骤s318,获取摊铺厚度;
[0109]
le=df
‑
dl
×
cos∠ldf,其中,le表示摊铺厚度,g为a在参考面上的第二投影点,熨平板后沿l在参考面的投影为第三投影点e。
[0110]
本实施例中,依据摊铺机模型中的铰接点和参考点,构建铰接点与参考点的几何关系,得到点与点之间的距离,最终获取摊铺厚度,计算过程简单。
[0111]
实施例4:
[0112]
如图6所示,本实施例提供了一种摊铺厚度的获取方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0113]
在获取找平油缸的第一伸缩长度之前,获取方法还包括构建计算模型,具体包括以下步骤:
[0114]
步骤s402,获取找平油缸下铰接点b与大臂油缸下铰接点c之间的第一长度bc;
[0115]
步骤s404,获取找平油缸上铰接点a与大臂油缸上铰接点d之间的第二长度ad;
[0116]
步骤s406,获取第一线段与找平油缸之间的第一夹角;
[0117]
其中,找平油缸上铰接点a与大臂油缸上铰接点d的连线为第一线段;
[0118]
步骤s408,获取找平油缸下铰接点b与第一参考点l之间的第三长度bl;
[0119]
步骤s410,获取大臂油缸下铰接点c与第一参考点l之间的第四长度cl;
[0120]
步骤s412,获取大臂油缸上铰接点d与第二参考点f之间的第五长度df;
[0121]
步骤s414,设定第一伸缩长度和第二伸缩长度为自变量;
[0122]
步骤s416,设定摊铺厚度为因变量;
[0123]
其中,摊铺厚度为第一参考点l与第三参考点e之间的第六长度le;
[0124]
步骤s418,基于第一长度、第二长度、第三长度、第四长度、第五长度、第一夹角、第一伸缩长度、第二伸缩长度和摊铺厚度,构建计算模型的函数表达式。
[0125]
本实施例中,首先,依据摊铺机模型中的铰接点和参考点,构建铰接点与参考点的几何关系,得到点与点之间的距离,然后,将第一伸缩长度和第二伸缩长度作为自变量,摊铺厚度作为因变量,结合点与点之间的距离,通过几何关系,得到计算模型的函数表达式,推算过程简单,实用性高。
[0126]
本实施例根据实时的第一伸缩长度和第二伸缩长度,通过计算模型,获取实时的摊铺厚度,实现摊铺路面厚度的实施监控,无需对路面进行破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。通过计算模型进行计算,无需增加其他设备,不会产生额外成本。并且,计算模型不受周围环境中噪声和光线的影响,准确度高。
[0127]
实施例5:
[0128]
本实施例提供了一种摊铺厚度的获取方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0129]
构建计算模型的函数表达式,具体包括:
[0130]
l6=l5‑
l8×
cosα
10
;
[0131]
其中,l6表示摊铺厚度,l5表示第五长度,l8表示大臂油缸上铰接点d与第一参考点l之间的第八长度,α
10
表示∠fdl;
[0132]
l
82
=l
72
l
32
‑
2l7l3cosα8;
[0133]
l
72
=l
22
l
12
‑
2l2l1cosα1;
[0134]
α8=α6 α7;
[0135][0136][0137][0138]
α
10
=α9 α5;
[0139][0140]
α5=α3 α2‑
α4;
[0141]
[0142][0143]
α4=180
°‑
α1;
[0144]
其中,l1表示第一长度,l2表示第二长度,l3表示第三长度,l4表示第四长度,l7表示找平油缸下铰接点b与大臂油缸上铰接点d之间的第七长度,l1表示第一伸缩长度,l2表示第二伸缩长度,α1表示∠bad,α2表示∠bdc,α3表示∠adb,α4表示∠adf,α5表示∠fdc,α6表示∠dbc,α7表示∠cbl,α8表示∠dbl,α9表示∠cdl。
[0145]
本实施例中,基于第一长度、第二长度、第三长度、第四长度、第五长度、第一夹角、第一伸缩长度、第二伸缩长度和摊铺厚度,根据三角函数公式,通过几何运算,可以简单、快速、准确的得到计算模型具体的函数表达式,通过给出函数表达式的具体形式,使得更加简便的获取摊铺厚度。
[0146]
实施例6:
[0147]
如图7所示,本实施例提供了一种摊铺厚度的获取方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0148]
获取方法还包括以下步骤:
[0149]
步骤s502,在摊铺机进行摊铺之前,调整熨平板的仰角到位,计算获取摊铺厚度需要的参数,在摊铺机进行摊铺中,熨平板的仰角固定不变。
[0150]
本实施例中,熨平板仰角在摊铺前进行调整,预设好一定角度,在后面的摊铺过程中,仰角不再变化,熨平板仰角是在摊铺前就预先调整好后,再计算获取摊铺厚度需要的参数,大臂油缸下铰接点c与熨平板后沿第一参考点l之间长度,由于仰角不再变化,大臂油缸下铰接点c与第一参考点l之间第四长度cl是一个定值,同样的,找平油缸下铰接点b与第一参考点l之间长度第三长度bl也是一个定值。
[0151]
摊铺厚度需要的参数包括:第一伸缩长度、第二伸缩长度、大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的投影点f之间的连线df的长度。
[0152]
本实施例中,在摊铺机进行摊铺中,熨平板的仰角固定不变,简化了计算模型,增加了通过计算模型获取摊铺厚度的可行性。
[0153]
实施例7:
[0154]
如图8所示,本实施例提供了一种摊铺厚度的获取装置100,包括:第一获取模块110、第二获取模块120和计算模块130;第一获取模块110获取大臂油缸的第一伸缩长度;第二获取模块120获取找平油缸的第二伸缩长度;计算模块130基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
[0155]
本实施例中,大臂油缸、找平油缸可以采用磁滞油缸,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,无需增加其他传感器部件,降低获取摊铺厚度的成本,减少增加额外部件,可以减少维修。
[0156]
本实施例中,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,不受周围环境的影响,对噪声以及光线的影响可以忽略不计,适用于各种工况,保证最终获取的摊
铺厚度的精度。
[0157]
本实施例中,采用第一伸缩长度和第二伸缩长度作为变量,通过计算模型计算得到摊铺厚度,可以根据实时的第一伸缩长度和第二伸缩长度获取实时的摊铺厚度,进而实现对摊铺路面的厚度的实施监控,通过计算模型的方式获取摊铺厚度,无需对路面进行破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。
[0158]
实施例8:
[0159]
如图9所示,本实施例提供了一种摊铺厚度的获取装置200,包括:存储器210和处理器220,存储器210存储有程序或指令,处理器220执行程序或指令;其中,处理器220在执行程序或指令时,实现如本发明任一实施例的摊铺厚度的获取方法的步骤。
[0160]
实施例9:
[0161]
如图10所示,本实施例提供了一种摊铺机300,摊铺机包括机架、设在机架后侧的熨平板、大臂、找平油缸和大臂油缸,大臂的一端与机架连接,大臂的另一端与熨平板连接,找平油缸的一端与机架铰接,找平油缸的另一端与机架铰接,大臂油缸的一端与机架铰接,大臂油缸的另一端与机架铰接,还包括:摊铺厚度的获取装置400;摊铺厚度的获取装置400获取大臂油缸310的第一伸缩长度和找平油缸320的第二伸缩长度,基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
[0162]
本实施例中,大臂油缸、找平油缸可以采用磁滞油缸,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,无需增加其他传感器部件,降低获取摊铺厚度的成本,减少增加额外部件,可以减少维修。
[0163]
本实施例中,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,不受周围环境的影响,对噪声以及光线的影响可以忽略不计,适用于各种工况,保证最终获取的摊铺厚度的精度。
[0164]
本实施例中,采用第一伸缩长度和第二伸缩长度作为变量,通过计算模型计算得到摊铺厚度,可以根据实时的第一伸缩长度和第二伸缩长度获取实时的摊铺厚度,进而实现对摊铺路面的厚度的实施监控,通过计算模型的方式获取摊铺厚度,无需对路面进行破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。
[0165]
本实施例中,摊铺厚度可以通过本技术方案任一实施例的摊铺厚度的获取方法获取。
[0166]
进一步地,获取方法包括:获取大臂油缸的第一伸缩长度;获取找平油缸的第二伸缩长度;基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度。
[0167]
进一步地,基于第一伸缩长度和第二伸缩长度,通过计算模型,获取摊铺厚度,具体包括:获取大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的投影点f之间的连线df的长度;根据第一伸缩长度、第二伸缩长度、大臂长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad的长度、找平油缸上铰接点a与大臂油缸上铰接点d之间的连线ad与找平油缸之间的夹角、找平油缸下铰接点b与熨平板后沿l之间的连线bl的长度、大臂油缸下铰接点c与熨平板后沿l之间的连线cl的长度、大臂油缸上铰接点d与其在参考面上的投影点f之间的连线df
的长度,获得摊铺厚度;其中,大臂长度为找平油缸下铰接点b与大臂油缸下铰接点c之间的连线bc的长度,第一伸缩长度为找平油缸上铰接点a与找平油缸下铰接点b之间的连线ab的长度,第二伸缩长度为大臂油缸上铰接点d与大臂油缸下铰接点c之间的连线dc的长度。
[0168]
进一步地,获得摊铺厚度,具体包括:在三角形adb中,已知ab长度、ad长度和∠bad角度,采用余弦定理得到bd长度;在三角形bdc中,已知bd长度、dc长度和cb长度,采用余弦定理得到∠bdc角度;在三角形adb中,已知ab长度、bd长度和∠bad角度,采用正弦定理得到∠adb角度;在梯形agfd中,已知∠gad角度,得到∠adf角度,计算得到∠fdc角度;在三角形bdc中,已知bd长度、dc长度和cb长度,采用余弦定理得到∠dbc角度;在三角形bcl中,已知bc长度、cl长度和bl长度,采用余弦定理得到∠cbl角度,进而得到∠dbl角度;在三角形bdl中,已知bd长度、bl长度和∠dbl角度,采用余弦定理得到dl长度;在三角形dcl中,已知dc长度、cl长度和dl长度,采用余弦定理得到∠cdl角度,得到∠ldf=∠cdl ∠fdc;获取摊铺厚度,le=df
‑
dl
×
cos∠ldf,其中,le表示摊铺厚度。
[0169]
进一步地,在获取找平油缸的第一伸缩长度之前,获取方法还包括构建计算模型,具体包括:获取找平油缸下铰接点b与大臂油缸下铰接点c之间的第一长度bc;获取找平油缸上铰接点a与大臂油缸上铰接点d之间的第二长度ad;获取第一线段与找平油缸之间的第一夹角;获取找平油缸下铰接点b与第一参考点l之间的第三长度bl;获取大臂油缸下铰接点c与第一参考点l之间的第四长度cl;获取大臂油缸上铰接点d与第二参考点f之间的第五长度df;设定第一伸缩长度和第二伸缩长度为自变量;设定摊铺厚度为因变量;基于第一长度、第二长度、第三长度、第四长度、第五长度、第一夹角、第一伸缩长度、第二伸缩长度和摊铺厚度,构建计算模型的函数表达式。
[0170]
进一步地,构建计算模型的函数表达式,具体为:l6=l5‑
l8×
cosα
10
;
[0171]
进一步地,获取方法还包括:在摊铺机进行摊铺之前,调整熨平板的仰角到位,计算获取摊铺厚度需要的参数,在摊铺机进行摊铺中,熨平板的仰角固定不变。
[0172]
实施例10:
[0173]
本实施例提供了一种可读存储介质,可读存储介质存储有程序或指令,程序或指令被处理器执行时,实现上述任一实施例的摊铺厚度的获取方法的步骤。
[0174]
具体实施例:
[0175]
本实施例提供了一种摊铺厚度的获取方法,以行走机构(履带或轮胎等)的工作路面为基准面,采用找平磁滞油缸,大臂磁滞油缸作为摊铺厚度测量的变量,从而实现摊铺厚度计算的具体算法。
[0176]
如图11所示,摊铺机包括找平油缸320、大臂330、大臂油缸310、机械仰角调节装置340和熨平板350,其中,机械仰角调节装置340的一端与机架铰接,机械仰角调节装置340的另一端与熨平板350铰接,熨平板350与机架转动连接,机械仰角调节装置340可伸长和缩短,通过机械仰角调节装置340的伸长和缩短可以实现熨平板350绕其与机架的转动连接处转动,从而实现熨平板350的仰角调节。
[0177]
本实施例中,找平油缸、大臂油缸均采用磁滞油缸。
[0178]
获得找平油缸伸缩长度(第一伸缩长度)、大臂油缸伸缩长度(第二伸缩长度)、大臂长度(第一长度bc)、找平油缸上铰接点a与大臂油缸上铰接点d之间的距离、第一线段与大臂油缸之间的第一夹角(找平、大臂油缸上铰接ad与找平油缸之间的夹角)、找平油缸下
铰接点b与熨平板后沿l之间长度(第三长度bl)、大臂油缸下铰接点c与熨平板后沿l之间长度(第四长度cl)、大臂油缸铰接d与第二参考点f之间的垂直距离(第五长度df)。
[0179]
根据找平油缸伸缩长度(第一伸缩长度)、大臂油缸伸缩长度(第二伸缩长度)、大臂长度(第一长度bc)、找平油缸上铰接点a与大臂油缸上铰接点d之间的距离、第一线段与大臂油缸之间的第一夹角(找平、大臂油缸上铰接ad与找平油缸之间的夹角)、找平油缸下铰接点b与熨平板后沿l之间长度(第三长度bl)、大臂油缸下铰接点c与熨平板后沿l之间长度(第四长度cl)、大臂油缸铰接d与第二参考点f之间的垂直距离(第五长度df),计算摊铺厚度。
[0180]
其中,找平油缸伸缩长度为找平油缸上铰接点a和下铰接点b之间的距离(第一伸缩长度),大臂油缸伸缩长度为大臂油缸上铰接点d和下铰接点c之间的距离(第二伸缩长度),大臂长度为找平油缸下铰接点b与大臂油缸下铰接点c之间的距离。
[0181]
在此模型中存在以下已知定值:
[0182]
[0183]
如图12所示,其中,几何关系为:
[0184]
(1)在三角形
△
adb中,已知两边及其夹角,用余弦定理可得bd(l7)长度。
[0185]
l
72
=l
22
l
12
‑
2l2l1cosα1[0186]
(2)在三角形
△
bdc中,已知三边长,可用余弦定理得∠bdc(α2)角度。
[0187]
l
12
=l
72
l
22
‑
2l7l2cosα2[0188]
(3)在三角形
△
adb中,已知两边及任意一角,可用正弦定理求∠adb(α3)角度。
[0189]
l
12
=l
72
l
22
‑
2l7l2cosα3[0190]
(4)在梯形agfd中,已知∠bad(α1),可知∠adf(α4)的角度,从而算出∠fdc(α5)的角度。
[0191]
α1 α4=180
[0192]
α4 α5=α3 α2[0193]
(5)在三角形
△
bdc中,已知三边长,可用余弦定理求∠dbc(α6)。
[0194]
l
22
=l
72
l
12
‑
2l7l1cosα6[0195]
(6)在三角形
△
bcl中,已知三边长,可用余弦定理求∠cbl(α7),从而可知∠dbl(α8)的角度。
[0196]
l
42
=l
12
l
32
‑
2l1l3cosα7[0197]
α8=α6 α7[0198]
(7)在三角形
△
bdl中,已知两边及其夹角,可用余弦定理求dl(l8)。
[0199]
l
82
=l
72
l
32
‑
2l7l3cosα8[0200]
(8)在三角形
△
dcl中,已知三边长,可用余弦定理求∠cdl(α9);
[0201]
l
42
=l
22
l
82
‑
2l2l8cosα9[0202]
从而可知α
10
=α9 α5。
[0203]
(9)摊铺厚度l6=l5‑
l8×
cosα
10
(le=df
‑
dl
×
cos∠ldf)。
[0204]
其中,熨平板仰角是在摊铺前就预先调整好,在后面的摊铺过程中,仰角不再变化,熨平板仰角是在摊铺前就预先调整好后,再获得大臂油缸下铰接点c与熨平板后沿l之间长度,由于仰角不再变化,大臂油缸下铰接点c与熨平板后沿l之间长度是一个定值,同样的,找平油缸下铰接点b与熨平板后沿l之间长度。
[0205]
本实施例仅使用磁滞油缸的伸缩量作为变量,磁滞油缸为自带位移传感器的油缸,无需其他传感器,极大降低了成本。
[0206]
本实施例通过数学建模得到一种算法,对厚度的进行实时计算,变量因子仅为磁滞油缸伸缩量,不受外界环境,温度,气候等影响。
[0207]
本实施例的实施测量不会对摊铺路面造成破坏性影响。
[0208]
综上,本发明实施例的有益效果为:
[0209]
1.本实施例中,通过磁滞油缸可以实时监控大臂油缸、找平油缸的伸缩长度,不受周围环境的影响,对噪声以及光线的影响可以忽略不计,适用于各种工况,保证最终获取的摊铺厚度的精度。
[0210]
2.本实施例中,采用第一伸缩长度和第二伸缩长度作为变量,通过计算模型计算得到摊铺厚度,可以根据实时的第一伸缩长度和第二伸缩长度获取实时的摊铺厚度,进而实现对摊铺路面的厚度的实施监控,通过计算模型的方式获取摊铺厚度,无需对路面进行
破坏,计算效率高,避免检测仪器的精度对摊铺厚度造成影响。
[0211]
3.本实施例中,依据摊铺机模型中的铰接点和参考点,构建铰接点与参考点的几何关系,得到点与点之间的距离,将第一伸缩长度和第二伸缩长度作为自变量,摊铺厚度作为因变量,结合点与点之间的距离,通过几何关系,得到计算模型的函数表达式,推算过程简单,实用性高。
[0212]
在本发明中,术语“第一”、“第二”、“第三”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0213]
本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明的限制。
[0214]
在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0215]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。