1.本发明涉及一种操作平台,尤其涉及一种智慧档案馆一体操作平台。
背景技术:
2.智慧档案柜包括硬件部分和软件部分,可以实现从档案的生产、入盒、上架、下架、借阅、归还、销毁等环节的一个闭环管理。目前,通常采用人工管理的方式实现智慧档案柜的档案管理,管理工作较复杂,且随着档案数量越来越多,也越来越全面细致,为档案管理增重了负担,且目前的管理系统中借档、还档和查档的流程较为繁琐,效率低下。
3.因此,需要设计一种方便人们进行档案管理,工作简单,且借档、还档和查档的流程较为便捷,效率高效的智慧档案馆一体操作平台,以解决现有技术问题。
技术实现要素:
4.为了克服随着档案数量越来越多,也越来越全面细致,为档案管理增重了负担,且目前的管理系统流程较为繁琐,效率低下的缺点,技术问题为:提供一种方便人们进行档案管理,工作简单,且借档、还档和查档的流程较为便捷,效率高效的智慧档案馆一体操作平台。
5.本发明的技术方案是:一种智慧档案馆一体操作平台,包括有:储存支撑座,储存支撑座上设有底箱;n型座,n型座对称锁安装在底箱上;凹型座,凹型座安装在底箱上;支撑立板,支撑立板安装在底箱上;支撑支架,支撑支架数量为三个,且支撑支架间隔安装在储存支撑座上;中空顶板,中空顶板安装在底箱上;防尘盖板,防尘盖板铰接式安装在中空顶板上;弹簧锁舌,弹簧锁舌对称式安装在储存支撑座上;lcd显示屏,lcd显示屏安装在底箱上;驱动机构,安装在底箱上,用于提供动力;存储机构,安装在储存支撑座与驱动机构之间,用于放置档案。
6.进一步的,驱动机构包括有:伺服电机,伺服电机安装在底箱上;驱动转轴,驱动转轴安装在伺服电机的输出轴上;t型转动块,t型转动块安装在驱动转轴上;转动立轴,转动立轴转动式安装在底箱上;步进半球型罩,步进半球型罩安装在转动立轴,步进半球型罩与t型转动块配合。
7.进一步的,存储机构包括有:旋转圆盘,旋转圆盘安装在储存支撑座上,旋转圆盘与转动立轴固定连接;升降档案箱,升降档案箱数量为四个,且升降档案箱间隔安装在旋转圆盘上;隐藏式提手,隐藏式提手安装在升降档案箱上;导向杆,导向杆对称式安装在升降档案箱上;定位挡板,定位挡板滑动式安装在两根导向杆之间;顶升弹簧,顶升弹簧安装在定位挡板与导向杆之间;分隔栅,分隔栅安装在升降档案箱上。
8.进一步的,还包括有阻挡机构,阻挡机构包括有:异形凸轮,异形凸轮安装在驱动转轴上;定位方管,定位方管安装在底箱上;伸缩推杆,伸缩推杆安装在定位方管上,伸缩推杆位于异形凸轮凹槽内与其滑动配合;导向柱,导向柱对称式安装在底箱上;定位块,定位块滑动式安装在导向柱上,定位块与伸缩推杆固定连接;复位弹簧,复位弹簧安装在定位块
与导向柱之间;压力传感器,压力传感器嵌入式安装在n型座上,压力传感器贯穿定位方管与伸缩推杆配合;电动推杆,电动推杆安装在中空顶板上;阻挡板,阻挡板安装在电动推杆上;归位按钮,归位按钮安装在n型座上。
9.进一步的,还包括有升降机构,升降机构包括有:顶升杆,顶升杆铰接式安装在支撑立板上;传动连杆,传动连杆转动式的穿接于顶升杆一侧;升降推杆,升降推杆铰接式安装在底箱上,升降推杆一端转动式套于传动连杆上与其配合;u型连杆,u型连杆铰接式安装在凹型座上;固定连块,固定连块转动式安装在u型连杆与顶升杆之间;导杆,导杆数量为四根,且导杆间隔安装在底箱上;升降推块,升降推块滑动式安装在四根导杆之间;受力底板,受力底板安装在升降推块上;缓冲弹簧,缓冲弹簧对称式安装在储存支撑座与受力底板之间。
10.进一步的,还包括有除湿机构,除湿机构包括有:防护罩,防护罩安装在中空顶板上;进气风扇,进气风扇转动式安装在中空顶板上;发热膜组,发热膜组安装在中空顶板上;导气管,导气管安装在发热膜组与储存支撑座之间并连通;冷凝罩,冷凝罩安装在储存支撑座上;湿度传感器,湿度传感器安装在冷凝罩上;出气管,出气管安装在储存支撑座上并连通。
11.进一步的,还包括有显示机构,显示机构包括有:驱动齿轮,驱动齿轮安装在驱动转轴上;旋转杆,旋转杆转动式安装在储存支撑座上;啮合齿轮,啮合齿轮安装在旋转杆上,啮合齿轮与驱动齿轮啮合;显示转盘,显示转盘安装在旋转杆上。
12.进一步的,还包括有电控箱,电控箱安装在底箱上,电控箱内包括有开关电源、电源模块和控制模块,开关电源为整个设备供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,开关按钮、湿度传感器、压力传感器、lcd显示屏都与控制模块通过电性连接,伺服电机、电动推杆、发热膜组和进气风扇都与控制模块通过外围电路连接。
13.有益效果是:
14.1、本发明通过驱动机构和存储机构的配合,能够方便人们借档、还档和查档流程较为便捷,流效率高效,方便人们的使用。
15.2、本发明通过升降机构的作用,可带动升降档案箱向上移动,如此,无需人们手动拉动升降档案箱移动。
16.3、本发明通过除湿机构的作用,使得本装置湿度始终保持在一定的范围,方便人们的使用。
附图说明
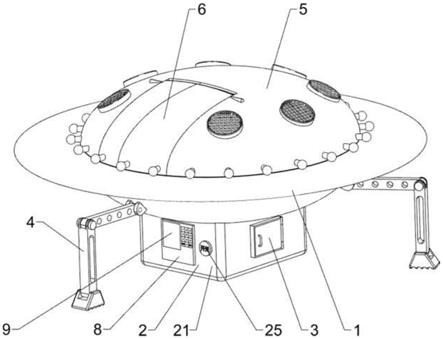
17.图1为本发明的立体结构示意图。
18.图2为本发明的第一种部分立体结构示意图。
19.图3为本发明a部分的放大示意图。
20.图4为本发明b部分的放大示意图。
21.图5为本发明c部分的放大示意图。
22.图6为本发明的第二种部分立体结构示意图。
23.图7为本发明的第三种部分立体结构示意图。
24.图8为本发明的电路框图。
25.图9为本发明的电路原理图。
26.附图标记中:1_储存支撑座,21_底箱,22_n型座,23_凹型座,24_支撑立板,25_开关按钮,3_电控箱,4_支撑支架,5_中空顶板,6_防尘盖板,7_弹簧锁舌,9_lcd显示屏,10_驱动机构,101_伺服电机,102_驱动转轴,103_t型转动块,104_转动立轴,105_步进半球型罩,11_存储机构,111_旋转圆盘,112_升降档案箱,113_隐藏式提手,114_定位挡板,115_顶升弹簧,116_分隔栅,117_导向杆,12_阻挡机构,121_异形凸轮,122_定位方管,123_伸缩推杆,124_定位块,125_复位弹簧,126_导向柱,127_压力传感器,128_电动推杆,129_阻挡板,1210_归位按钮,13_升降机构,131_升降推杆,132_传动连杆,133_顶升杆,134_固定连块,135_u型连杆,136_导杆,137_升降推块,138_受力底板,139_缓冲弹簧,14_除湿机构,141_防护罩,142_进气风扇,143_发热膜组,144_导气管,145_冷凝罩,146_湿度传感器,147_出气管,15_显示机构,151_驱动齿轮,152_啮合齿轮,153_旋转杆,154_显示转盘。
具体实施方式
27.以下结合附图和具体实施例对本发明作具体的介绍。
28.实施例1
29.一种智慧档案馆一体操作平台,如图1
‑
图4所示,包括有储存支撑座1、底箱21、n型座22、凹型座23、支撑立板24、开关按钮25、支撑支架4、中空顶板5、防尘盖板6、弹簧锁舌7、lcd显示屏9、驱动机构10和存储机构11,储存支撑座1底部中间设有底箱21,底箱21内底部后侧中部固接有n型座22,底箱21内底部左侧前部固接有凹型座23,底箱21内底部左侧前部固接有支撑立板24,底箱21前部设有开关按钮25,储存支撑座1外侧面间隔设有三个支撑支架4,底箱21顶部固接有中空顶板5,中空顶板5前部中间铰接式设有防尘盖板6,储存支撑座1前部中间左右对称设有弹簧锁舌7,底箱21前部设有lcd显示屏9,底箱21上设有驱动机构10,储存支撑座1与驱动机构10之间设有存储机构11。
30.驱动机构10包括有伺服电机101、驱动转轴102、t型转动块103、转动立轴104和步进半球型罩105,底箱21内后部设有伺服电机101,伺服电机101的输出轴上连接有驱动转轴102,驱动转轴102前端固接有t型转动块103,底箱21内底部中间转动式设有转动立轴104,转动立轴104下部周向固接有步进半球型罩105,步进半球型罩105与t型转动块103配合。
31.存储机构11包括有旋转圆盘111、升降档案箱112、隐藏式提手113、定位挡板114、顶升弹簧115、分隔栅116和导向杆117,储存支撑座1内转动式设有旋转圆盘111,旋转圆盘111底部圆心位置与转动立轴104顶端固定连接,旋转圆盘111上间隔滑动式设有四个升降档案箱112,升降档案箱112上部中侧滑动式设有隐藏式提手113,升降档案箱112内底部外侧对称式设有导向杆117,两根导向杆117之间滑动式设有定位挡板114,定位挡板114底部与导向杆117下部之间绕接有顶升弹簧115,升降档案箱112内底部间隔设有分隔栅116。
32.人们按下电源总开关,将本装置上电,lcd显示屏9工作将当前时间与日期进行显示,将本装置拉动防尘盖板6向上摆动,进而人们通过隐藏式提手113拉动升降档案箱112向上移动,且人们可将档案放置在分隔栅116内,定位挡板114对档案进行限位,顶升弹簧115起到缓冲作用,当人们将档案放置好后,通过隐藏式提手113拉动升降档案向下移动复位,再拉动防尘盖板6向下摆动复位,弹簧锁舌7对防尘盖板6进行限位,按动开关按钮25一次,
控制模块接受信号后控制伺服电机101工作12秒,伺服电机101带动驱动转轴102转动半圈,驱动转轴102转动半圈带动t型转动块103转动半圈,t型转动块103转动半圈不与步进半球型罩105接触,12秒后,控制模块控制伺服电机101关闭,再次开关按钮25一次,控制模块接收信号后控制伺服电机101再次工作12秒,驱动转轴102转动4秒时,t型转动块103转动与步进半球型罩105接触带动其转动九十度,步进半球型罩105转动九十度带动转动立轴104转动九十度,转动立轴104转动九十度带动旋转圆盘111转动九十度,旋转圆盘111转动九十度带动另一个升降档案箱112转动至前侧,12秒后,控制模块控制伺服电机101关闭,再按下电源总开关,将本装置断电,lcd显示屏9停止工作。
33.实施例2
34.在实施例1的基础之上,如图2、图5和图6所示,还包括有阻挡机构12,阻挡机构12包括有异形凸轮121、定位方管122、伸缩推杆123、定位块124、复位弹簧125、导向柱126、压力传感器127、电动推杆128、阻挡板129和归位按钮1210,驱动转轴102前部周向固接有异形凸轮121,底箱21内底部后侧中部固接有定位方管122,定位方管122内滑动式设有伸缩推杆123,伸缩推杆123上部位于异形凸轮121凹槽内与其滑动配合,底箱21内底部后侧中部左右对称固接有导向柱126,导向柱126上滑动式设有定位块124,定位块124内侧面与伸缩推杆123外侧面固定连接,定位块124底部与导向柱126下部之间绕接有复位弹簧125,n型座22下部中间嵌入式设有压力传感器127,压力传感器127贯穿定位方管122与伸缩推杆123配合,中空顶板5后部设有电动推杆128,电动推杆128的伸缩杆上设有阻挡板129,n型座22上部左侧设有归位按钮1210。
35.还包括有升降机构13,升降机构13包括有升降推杆131、传动连杆132、顶升杆133、固定连块134、u型连杆135、导杆136、升降推块137、受力底板138和缓冲弹簧139,支撑立板24上部铰接式设有顶升杆133,顶升杆133右部转动式的穿接有传动连杆132,底箱21内底部左侧前部铰接式设有升降推杆131,升降推杆131上部转动式的套于传动连杆132前部上与其配合,凹型座23上部铰接式设有u型连杆135,u型连杆135后部左侧与顶升杆133左部之间铰接式设有固定连块134,底箱21内底部前侧间隔设有四根导杆136,四根导杆136之间滑动式设有升降推块137,升降推块137中部与u型连杆135上部滑动连接,升降档案箱112外底部固接有受力底板138,受力底板138与升降推块137接触配合,储存支撑座1内部与受力底板138两侧都绕接有缓冲弹簧139。
36.本设备上电之后,压力传感器127开始工作,按动开关按钮25一次,开关按钮25发出信号,控制模块接收信号后控制伺服电机101工作12秒,伺服电机101运行的前6秒,t型转动块103转动与步进半球型罩105配合,从而带动旋转圆盘111转动45度,使得下一个升降档案箱112转动至前侧,驱动转轴102转动带动异形凸轮121转动6秒时,异形凸轮121转动与伸缩推杆123接触带动其向下移动,也就带动定位块124向下移动,复位弹簧125被压缩,伸缩推杆123向下移动与压力传感器127接触,压力传感器127发出信号,控制模块接收信号后控制电动推杆128缩短1秒,电动推杆128带动阻挡板129向后移动停止对升降档案箱112进行限位,在电动推杆128缩短1秒过程中时,异形凸轮121继续转动与伸缩推杆123脱离,因复位弹簧125的作用,伸缩推杆123向上移动复位,伺服电机101运行12秒后,控制模块控制伺服电机101关闭,然后人们即可通过隐藏式提手113拉动升降档案箱112向上移动,当无需使用本装置时,拉动升降档案箱112向下移动复位,再次按开关按钮25一次,控制模块接收信号
后控制伺服电机101再次工作12秒,驱动转轴102带动异形凸轮121转动1秒时,异形凸轮121转动与归位按钮1210接触,归位按钮1210发出信号,控制模块接收信号后控制电动推杆128延时2秒伸长1秒,电动推杆128也就带动阻挡板129向前移动对升降档案箱112进行限位,伺服电机101运行6秒后,t型转动块103转动与步进半球型罩105接触带动其转动6秒,从而带动旋转圆盘111转动45度,伺服电机101工作12秒后,异形凸轮121转动复位,控制模块控制伺服电机101关闭。
37.本设备上电之后,按动开关按钮25一次,开关按钮25发出信号,控制模块控制伺服电机101工作12秒,伺服电机101运行前6秒,t型转动块103转动与步进半球型罩105配合,从而带动旋转圆盘111转动45度,使得下一个升降档案箱112转动至前侧,异形凸轮121转动6秒后使得伸缩推杆123向下移动与压力传感器127接触,压力传感器127发出信号,控制模块接收信号后控制电动推杆128缩短1秒,电动推杆128带动阻挡板129向后移动停止对升降档案箱112进行限位,1秒后,控制模块接收信号后还控制升降推杆131伸长2秒,升降推杆131带动传动连杆132向上摆动,传动连杆132向上摆动带动顶升杆133向上摆动,顶升杆133向上摆动带动固定连块134向上移动,固定连块134向上移动带动u型连杆135向上摆动,u型连杆135向上摆动带动升降推块137向上移动,升降推块137向上移动带动受力底板138向上移动,受力底板138向上移动带动升降档案箱112向上移动,缓冲弹簧139起到缓冲作用,伺服电机101运行12秒后,控制模块控制伺服电机101关闭,当人们无需使用本装置时,再次按动开关按钮25一次,开关按钮25发出信号,控制模块再次接收信号后控制伺服电机101工作12秒,异形凸轮121转动1秒与归位按钮1210接触,归位按钮1210发出信号,控制模块接收信号后控制升降推杆131缩短2秒,升降推杆131带动传动连杆132向下摆动复位,受力底板138也就带动升降档案箱112向下移动复位,2秒后,控制模块控制电动推杆128伸长1秒,电动推杆128也就带动阻挡板129向前移动对升降档案箱112进行限位,伺服电机101运行6秒后,t型转动块103转动与步进半球型罩105接触带动其转动6秒,从而带动旋转圆盘111转动45度,伺服电机101运行12秒后,控制模块控制伺服电机101关闭。
38.实施例3
39.在实施例1和实施例2的基础之上,如图2和图7所示,还包括有除湿机构14,除湿机构14包括有防护罩141、进气风扇142、发热膜组143、导气管144、冷凝罩145、湿度传感器146和出气管147,中空顶板5上间隔设有防护罩141,中空顶板5内后部左侧转动式设有进气风扇142,中空顶板5内后部左侧设有发热膜组143,发热膜组143与储存支撑座1之间设有导气管144并连通,储存支撑座1内后部中间设有冷凝罩145,冷凝罩145上设有湿度传感器146,储存支撑座1内后部右侧设有出气管147并连通。
40.还包括有显示机构15,显示机构15包括有驱动齿轮151、啮合齿轮152、旋转杆153和显示转盘154,驱动转轴102后部周向固接有驱动齿轮151,储存支撑座1内后部中间转动式设有旋转杆153,旋转杆153前部周向固接有啮合齿轮152,啮合齿轮152与驱动齿轮151啮合,旋转杆153后端固接有显示转盘154。
41.本设备上电之后,湿度传感器146开始工作,当湿度传感器146检测到的湿度高于控制模块的额定值时,湿度传感器146发出信号,控制模块接受信号后控制进气风扇142工作,进气风扇142工作通过导气管144将空气排入,同时控制模块控制发热膜组143工作,空气接触发热膜组143能够对本装置进行均匀除湿,出气管147有利空气排出,当湿度传感器
146检测到的湿度低于控制模块的额定值时,湿度传感器146再发出信号,控制模块接受信号后控制进气风扇142关闭,同时控制模块控制发热膜组143关闭,空气也就停止排入。
42.伺服电机101工作时,驱动转轴102转动带动驱动齿轮151转动,驱动齿轮151转动带动啮合齿轮152转动,啮合齿轮152转动带动旋转杆153转动,旋转杆153转动带动显示转盘154转动,可方便人们观察升降档案箱112转动情况。
43.如图1、图8和图9所示,还包括有电控箱3,底箱21右部设有电控箱3,电控箱3内包括有开关电源、电源模块和控制模块,开关电源为整个设备供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,开关按钮24、湿度传感器146、压力传感器127、lcd显示屏9和归位按钮1210都与控制模块通过电性连接,伺服电机101、电动推杆128、发热模组、进气风扇142和升降推杆131都与控制模块通过外围电路连接。
44.以上对本技术进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
