1.本技术涉及建筑设备的领域,尤其是涉及一种智能升降型建筑用吊笼。
背景技术:
2.在工地上,通常使用吊笼来搬运货物,其中,吊笼安装在竖直的丼道内,通过缆绳以及安装在吊笼顶部的滑轮将吊笼拉起,从而实现货物在竖直方向上的运输。由于吊笼能够搬运的货物较多且耗费的人力较少,因此在建筑工地上应用较为广泛。
3.在工人使用吊笼搬运货物的过程中,需要工人将吊笼的机门拉开,在进行下一趟搬运前,工人需要再次将机门关闭,以保证电梯的正常运行。
4.针对上述中的相关技术,发明人认为存在的缺陷在于:工人在使用吊笼搬运货物的过程中需要手动多次开闭吊笼机门,大幅增加了工人的劳动强度,降低了货物的搬运效率。
技术实现要素:
5.为了减少工人开闭吊笼机门所花费的时间,本技术提供一种智能升降型建筑用吊笼,通过液压缸控制机门的开启与关闭,从而方便机门的开闭,减少工人开闭机门的时间,提高了吊笼的运输效率。
6.本技术提供的一种智能升降型建筑用吊笼,采用如下的技术方案:
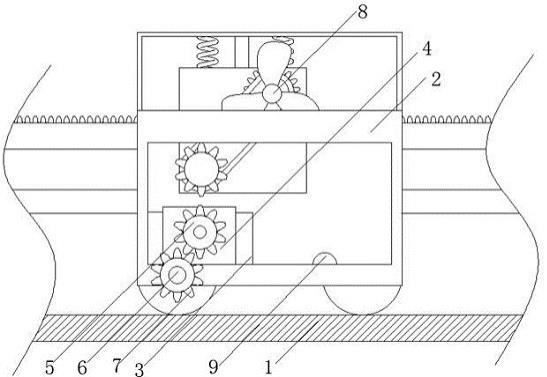
7.一种智能升降型建筑用吊笼,包括:吊笼本体;设置在所述吊笼本体上的滑轮;以及滑动对称安装在所述吊笼本体上的机门,所述吊笼本体上设置有机动开门机构,所述机动开门机构包括:设置在所述机门上的滑块;设置在所述吊笼本体上且与所述滑块相适配的滑槽;以及设置在所述吊笼本体上用于驱动所述滑块的驱动件。
8.通过采用上述技术方案,当驱动件驱动连接块时,能够使连接块带动机门上的滑块沿滑槽滑动,从而实现吊笼机门的开闭。
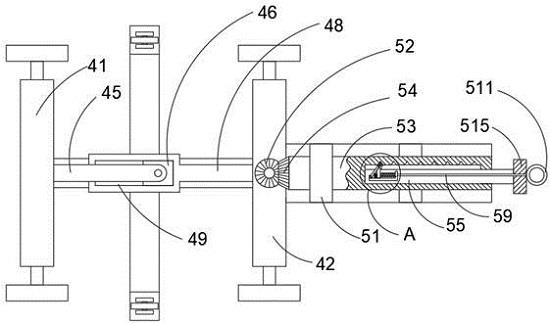
9.优选的,所述驱动件包括:设置在所述机门上的连接块;设置在所述吊笼本体上的支撑板;以及竖直设置在所述支撑板上的液压缸,其中,所述液压缸的活塞杆输出端贯穿所述支撑板,所述活塞杆的端部设置有铰接块,所述铰接块两侧对称铰接有连杆,所述连杆远离所述铰接块的一端铰接在所述连接块上,所述滑块设置在所述连接块靠近所述吊笼本体的一侧。
10.优选的,两侧所述机门的接触面上设置有橡胶块。
11.通过采用上述技术方案,在机门关闭的过程中意外夹住物体时,由于橡胶块具备一定的形变能力,能够减少减少物体受到的损伤。
12.优选的,所述橡胶块上开设有保护腔。
13.通过采用上述技术方案,保护腔能够在机门处于闭合状态时在两侧的机门间留有一定的空间,从而在机门夹住物体时保护物体不被机门夹伤或者夹坏
14.优选的,所述保护腔的腔壁呈弧形。
15.通过采用上述技术方案,弧形内壁的保护腔能够使保护腔的内壁变得更加的圆滑,减少保护腔内壁的棱角,从而更好的保护被机门夹住的物体。
16.优选的,所述保护腔的内壁设置有压力传感器,所述传感器电性连接在液压缸控制器上。
17.通过采用上述技术方案,在机门内夹有物体时,压力传感器能够检测到物体对于橡胶块内壁的压力,对液压缸控制器发出信号,使液压缸控制器控制液压缸的活塞杆运动,从而使机门打开,减少被夹物体所受的损伤。
18.优选的,所述连接块的外侧外设置有保护罩,其中,所述保护罩与所述支撑板相适配。
19.通过采用上述技术方案,保护罩能够将驱动件与外界有效隔开,从而起到保护驱动件的效果。
20.优选的,所述吊笼本体的上端与下端均开设有所述滑槽。
21.通过采用上述技术方案,当吊笼本体的上端与下端均开设有滑槽时,能够使机门的承重更加均匀,同时延长了吊笼本体的使用寿命。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.通过驱动液压缸的活塞杆运动,使得活塞杆带动连杆运动,从而使连杆对连接块施加水平方向的分力,进而推动机门上的滑块沿滑槽运动,从而实现机门的开启与关闭;
24.2.通过橡胶块以及橡胶块侧壁上开设的保护腔,能够有效减少被机门所夹住物体的损伤,同时,通过保护腔内的压力传感器以及电性连接在压力传感器上的机门控制器,使得机门在夹住物体后能够通过压力传感器对机门控制器暗处信号,进而有效减少物体被机门夹住时所受到的损伤。
附图说明
25.图1是本技术实施例中吊笼本体的整体结构示意图;
26.图2是本技术实施例中的滑槽结构示意图;
27.图3是本技术实施例中的滑块结构示意图;
28.图4是本技术实施例中的驱动件结构示意图;
29.图5是本技术实施例中a的放大图。
30.附图标记说明:1、吊笼本体;11、滑轮;12、滑槽;13、支撑板;21、机门;22、保护罩;23、液压缸;24、铰接块;25、连杆;26、连接块;261、滑块;31、橡胶块;32、压力传感器。
具体实施方式
31.以下结合附图1
‑
5对本技术作进一步详细说明。
32.本技术实施例公开一种智能升降型建筑用吊笼。
33.参照图1,一种智能升降型建筑用吊笼,包括有吊笼本体1,在吊笼本体1的顶部安装有滑轮11,通过将缆绳绕设在滑轮11上,能够将吊笼本体1拉起,从而实现吊笼本体1的升降。
34.在吊笼本体1的一外侧壁滑动安装有机门21,机门21数量为二且对称安装在吊笼本体1上,具体地,吊笼本体1安装有机门21一侧的上端以及下端均水平开设有滑槽12。在机
门21靠近吊笼本体1的一侧的上下两端均安装有与滑槽12相适配的滑块261。其中,在两侧机门21的顶部对称固定有连接块26,上端的滑块261固定在连接块26靠近吊笼本体1的一侧。下端的滑块261固定在机门21的下端两侧。
35.为驱动两侧的机门21进行开闭,在两侧的连接块26上铰接有连杆25,两侧的连杆25远离连接块26的一端铰接在同一个铰接块24上,同时,在铰接块24上铰接有液压缸23的活塞杆。
36.其中,在吊笼本体1的顶部靠近机门21一侧的外缘向外延伸有支撑板13,上述液压缸23竖直安装在支撑板13上,且液压缸23的活塞杆竖直穿过支撑板13与铰接块24相连接。
37.在液压缸23的活塞杆向下运动时,活塞杆带动铰接块24向下运动,同时将两侧的连杆25下压,随后两侧的连杆25由于一端与连接块26相铰接,因此在活塞杆的带动下连杆25向外侧推动连接块26以及上端的滑块261,使得机门21向两侧滑动,从而实现机门21的开启。在活塞杆向上运动时,活塞杆带动铰接块24向上运动,此时连杆25带动连接块26以及滑块261向内侧滑动,使得机门21向内侧滑动,从而实现机门21的关闭。
38.同时,为保护铰接块24、连杆25以及连接块26,在吊笼本体1的侧壁上安装有保护罩22,具体地,保护罩22与支撑板13相适配且位于机门21的上方。
39.此外,为防止机门21在关闭时由于人为操作失误从而导致机门21意外关闭,进而对通过机门21的货物或者人的肢体造成损伤,在本实施例中,在两侧机门21的相对面上安装有橡胶块31,由于橡胶块31具备一定的形变能力,因此能够在与货物或者人体接触时产生一定的形变,从而减少货物或者人体受到的损伤。
40.为进一步保护货物以及人体,在本实施例中,在两侧橡胶块31的相对面上开设有弧形的保护腔,从而为受到机门21挤压的物体预留一定的空间,在保证机门21的密封效果同时进一步提高了机门21的安全性。
41.此外,为在机门21误夹物体时实现机门21的自动开门,在保护腔的内壁安装有压力传感器32,压力传感器32电性连接在液压缸控制器(图中未示出)上,在本实施例中,压力传感器32在竖直方向上安装有三组,每组包含三个压力传感器32,三个压力传感器32均布在保护腔内壁的同一水平面上。
42.当机门21误夹有物体时,被夹的物体与压力传感器32相接触,随后压力传感器32立即向液压缸控制器发出信号,液压缸控制器驱动液压缸23的活塞杆向上拉升,从而使得机门21开启,从而有效保护被误夹的物体。
43.本技术实施例一种智能升降型建筑用吊笼的实施原理为:
44.在工人想要使用吊笼本体1时,首先通过吊笼本体1上的按钮控制液压缸23活塞杆下降,下降的活塞杆驱动铰接块24向下运动,同时带动两侧的连杆25位于铰接块24的一端向下运动,此时连杆25带动另一端连接块26向外侧运动,同时带动上端的滑块261沿上端的滑槽12运动,下端的滑块261作为从动块沿下端的滑槽12运动。
45.从而带动机门21向两侧滑动,进而实现机门21的开启。
46.在需要关闭机门21时,通过吊笼本体1上的按钮驱动液压缸23的活塞杆上升,做与上述运动的逆向运动,从而实现机门21的关闭。
47.以上均为本技术的较佳实施例,本实施例仅是对本技术做出的解释,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本申
请的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。