1.本实用新型涉及新能源小型遥控驾驶技术电动车底盘领域,特别是涉及一种用于物流搬运的电动遥控车底盘。
背景技术:
2.随着新能源技术的普及,汽车电控技术的发展,政策支持新能源汽车关键技术研发,电动汽车技术发展迅速,然而,在小型非乘坐的物流搬运车辆领域,少有见到电动遥控的物流搬运车,通常都是人工推动运输货物,小型物流搬运用遥控驾驶技术电动车市场上暂时没有;现有市场上只有玩具类的电动遥控车,由于其底盘承载能力不高、电机驱动力矩不足,只适合玩具车行驶而不适合于搬运周转物料。
3.授权公告号为cn2403471y的中国专利公开了一种精密遥控汽车模型,通过电机驱动后桥转动带动后轮转动行走,该方案中,两个后轮的转动速度始终保持一致,不具有差速功能,而且,动力源相同,不能分别进行驱动,在搬运货物时不能够单轮施加动力,如果应用于物料搬运则搬运能力较低;授权公告号为cn2369731y的中国专利公开了一种遥控玩具汽车底盘,行走电机通过齿轮与后轮的转动轴啮合带动后轮转动行走,该方案与前述方案存在同样问题,不能很好的应用于物料搬运。
4.因此,如何开发一种适用于物流搬运的电动遥控车底盘是亟待解决的技术问题。
技术实现要素:
5.本实用新型的目的是提供一种用于物流搬运的电动遥控车底盘,以解决上述现有技术存在的问题,每个后轮对应设置有一个行走电机,可以分别驱动单个后轮转动,从而能够实现差速功能,保持行走的稳定性,还能单独提高单个车轮的施加力矩,提高搬运能力。
6.为实现上述目的,本实用新型提供了如下方案:
7.本实用新型提供一种用于物流搬运的电动遥控车底盘,包括车架、前轮以及后轮,所述车架的前部安装有前梁和转向结构,所述前轮连接所述转向结构并转动连接在所述前梁的两端;所述车架的尾部两侧分别安装有行走电机,所述行走电机与所述后轮驱动连接;所述车架上安装有无线接收模块,所述行走电机与行走控制器电连接,所述行走控制器与所述无线接收模块电连接;所述转向结构与转向控制器电连接,所述转向控制器与所述无线接收模块电连接。
8.优选地,所述转向结构包括转向舵机、由所述转向舵机驱动转动的转向板,所述转向板铰接有转向连接杆,所述转向连接杆铰接有转向连接板,所述转向连接板的另一端固定连接在前梁轴上,所述前梁轴转动连接在所述前梁上并与所述前轮转动连接。
9.优选地,所述转向舵机电连接有第一电池组,所述第一电池组位于所述车架的前部;所述行走电机电连接有第二电池组,所述第二电池组位于所述车架的尾部。
10.优选地,所述车架的前部安装有前梁安装件,所述车架通过所述前梁安装件搭接连接在所述前梁上。
11.优选地,所述行走电机通过电机支座安装在所述车架上,所述车架和所述电机支座之间设置有减震垫。
12.优选地,所述车架整体成凸字型,由多根横梁和纵梁焊接而成,所述横梁和所述纵梁为金属管件。
13.优选地,所述行走控制器通过屏蔽线与所述无线接收模块电连接。
14.优选地,所述行走电机采用无刷电机。
15.优选地,所述无刷电机连接有电子差速控制器和电磁制动器。
16.优选地,所述无刷电机及其安装的电子差速控制器、所述电磁制动器的外部设置有防护罩。
17.本实用新型相对于现有技术取得了以下技术效果:
18.(1)本实用新型每个后轮对应设置有一个行走电机,可以分别驱动单个后轮转动,从而能够实现差速功能,保持行走的稳定性,还能单独提高单个车轮的施加力矩,提高搬运能力;
19.(2)本实用新型转向舵机和行走电机分别电连接有第一电池组和第二电池组,即转向舵机和行走电机采用不同的电源供给,能够适用于不同的电机需求,另外,将电池组分布在车架的前部和尾部,能够平衡车架前后的配重,提高底盘整体的稳定性;
20.(3)本实用新型的前梁通过前梁安装件安装在车架上,而不是直接将前梁安装在车架上,能够将车架搭接固定在前梁上,方便安装和拆卸,同时,也便于后期的维护和保养,并能够对车架的平整度进行调节,以能够进一步的提高底盘的稳定性;
21.(4)本实用新型通过在车架和电机支座之间设置减震垫,能够缓冲地面传递到车架的振动,保证货物搬运过程的稳定性,同时,降低由于车架振动导致的车架上安装部件的松动并且保证焊接位置在长期使用后的牢固性,保证安全并降低维修频率;另外,本实用新型采用减震垫的形式而不采用弹簧减震的结构,在安装结构上相对简单,底盘在堆积货物后上下起伏不大,能够保证货物堆积后的稳定性。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
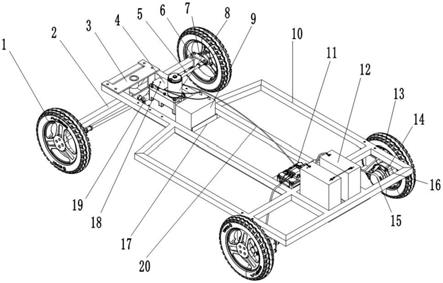
23.图1为本实用新型的整体结构示意图;
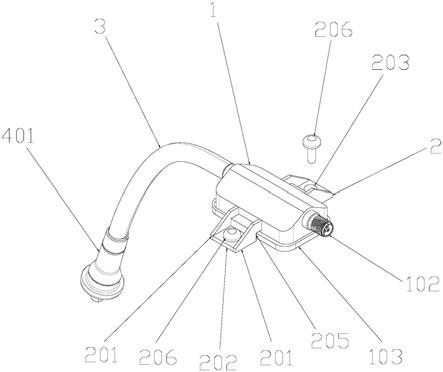
24.图2为转向结构局部示意图;
25.图3为后轮及行走电机的安装结构示意图;
26.其中,1、前轮;2、前梁;3、前梁安装件;4、无线接收模块;5、转向连接杆;6、前梁轴;7、转向连接板;8、转向舵机;9、第一电池组;10、车架;11、行走控制器;12、第二电池组;13、后轮;14、电磁制动器;15、防护罩;16、行走电机;17、安装板;18、减速箱;19、转向板;20、通信线。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.本实用新型的目的是提供一种用于物流搬运的电动遥控车底盘,以解决现有技术存在的问题,每个后轮对应设置有一个行走电机,可以分别驱动单个后轮转动,从而能够实现差速功能,保持行走的稳定性,还能单独提高单个车轮的施加力矩,提高搬运能力。
29.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
30.如图1所示,本实用新型提供一种用于物流搬运的电动遥控车底盘,包括车架10、前轮1以及后轮13,其中,车架10可以采用整体钢板切割制作,也可以采用金属管件焊接成型,总之,车架10可以作为一个整体来安装各附属结构后形成电动遥控车的底盘;前轮1和后轮13可以采用充气式轮胎,能够保证运行时的缓冲效果,降低路面行走时的振动。车架10的前部安装有前梁2和转向结构,前梁2可以穿过车架10后与车架10固定连接,也可以将车架10搭接在前梁2上实现安装,具体安装时,可以采用螺栓连接等可拆卸的连接方式,以便于后期的维护保养和维修。前轮1在连接转向结构后,能够依靠转向结构进行转向,以控制底盘的行进方向和轨迹;并且,前轮1转动连接在前梁2的两端,也就是说,前梁2相当于车辆的前悬架,依靠前轮1实现对车架10前部的支撑。车架10的尾部两侧分别安装有行走电机16,可以将行走电机16的输出轴位置与后轮13的转动中心重合,从而能够将行走电机16的输出轴直接连接后轮13,即行走电机16直接与后轮13驱动连接,如此一来可以避免设置多余的传动结构,以能够降低传动过程中的能量、功率的降低。车架10上安装有无线接收模块4,无线接收模块4可以采用2.4g无线模块,与无线接收模块4配套的还有无线发射模块,无线发射模块可以为手持式发射器,能够作为控制手柄进行操作,同样可以采用2.4g无线模块,能够与无线接收模块4进行配对,通过无线发射模块可以编码发出不同的pwm波信号到行走控制器11和转向控制器,通过pwm波信号控制车辆前进、后退、转弯、加速、减速以及停止等。无线接收模块4根据需要可以安装在与其接收控制信号靠近的位置,例如,可以将无线接收模块4安装在转向舵机8附近,或者集成在转向舵机8的减速箱18上。行走电机16与行走控制器11电连接,行走控制器11与无线接收模块4电连接,由于行走控制器11安装在距离行走电机16接近的车架10的尾部位置,行走控制器11与无线接收模块4之间通过通信线20进行连接以传递信号;无线接收模块4在接收到控制信号后会传递到行走控制器11,行走控制器11根据得到的信号驱动行走电机16正转还是反转,进而驱动后轮13前进或是后退;另外,行走控制器11还可以根据信号控制哪个后轮13的行走电机16转动、转动速度是多少等,以能够实现对不同后轮13的区别控制,从而能够实现差速功能,保持行走的稳定性,还能单独提高单个车轮的施加力矩,提高搬运能力。转向结构与转向控制器电连接,转向控制器与无线接收模块4电连接,转向控制器根据得到的控制信号驱动转向舵机8是否转动、正转还是反转、转动角度是多少等,通过转向结构来控制前轮1的偏转方向和角度;需要说明的是,减速箱18上可以设置转向角度传感器,以能够反馈偏转角度的信号,实现对转向的精确控制。
31.如图1
‑
2所示,转向结构包括转向舵机8、由转向舵机8驱动转动的转向板19,为了保证转向过程的稳定性,可以在转向舵机8和转向板19之间设置减速箱18,能够将转向舵机8的高速转动进行减速后传递到转向板19,另外,通过减速箱18后还可以具有放大转向舵机8的扭矩的效果,从而可以利用较小规格的转向舵机8进行转向控制。转向板19铰接有两个方向转向连接杆5,也就是说,转向板19将转动运动转换为转向连接杆5的来回摆动;转向连接杆5铰接有转向连接板7,转向连接板7的另一端固定连接在前梁轴6上,此时,转向连接杆5的来回摆动又转换为前梁轴6的转动;需要说明的是,前梁轴6拥有相互垂直的两个转轴,一个竖直方向,一个水平方向,竖直方向的转轴通过轴承安装在前梁2上的竖向孔内,能够在转向连接板7的拉动或推动作用下进行偏转,此时会带动水平方向的转轴偏转,而水平方向的转轴上安装有前轮1,此时,在前梁轴6的带动下也就实现了前轮1的转向。
32.如图1所示,转向舵机8电连接有第一电池组9,也就是说,转向舵机8由第一电池组9提供电源;第一电池组9可以采用dc12v新能源电池,对应的转向舵机8的电压也为dc12v。行走电机16电连接有第二电池组12,也就是说,行走电机16由第二电池组12提供电源;第二电池组12可以采用dc24v新能源电池,对应的行走电机16的电压也为dc24v。转向舵机8和行走电机16采用不同的电源供给,能够适用于不同的电机需求,从而能够将行走电机16采用更大功率的电机来驱动后轮13行走,提高整体承载能力。第一电池组9位于车架10的前部,第二电池组12位于车架10的尾部,能够平衡车架10前后的配重,提高底盘整体的稳定性。
33.如图2所示,车架10的前部安装有前梁安装件3,前梁安装件3形成截面为u型的开口槽,开口槽扣放在前梁2上,车架10连接在u型开口槽的底面,使得车架10能够搭接在前梁2上;将销轴垂直穿过u型开口槽的两个支臂面以及前梁2后完成前梁安装件3和前梁2的安装,为了保证安装的可靠性和牢固性,还可以在前梁2上套设固定套,u型开口槽扣放在固定套上;u型开口槽的两个支臂面可以分别焊接在车架10上,也可以采用螺钉紧固连接在车架10上。前梁2通过前梁安装件3安装在车架10上,而不是直接将前梁2安装在车架10上,能够将车架10搭接固定在前梁2上,方便安装和拆卸,同时,也便于后期的维护和保养,并能够对车架10的平整度进行调节,以能够进一步的提高底盘的稳定性。在车架10和前梁2之间还可以设置减震块,能够缓冲地面传递到车架10的振动,保证货物搬运过程的稳定性,同时,降低由于车架10振动导致的车架10上安装部件的松动并且保证焊接位置在长期使用后的牢固性,保证安全并降低维修频率。
34.如图3所示,行走电机16通过电机支座安装在车架10上,电机支座可以安装在车架10的侧面,也可以安装在车架10的底面,如果车架10采用横梁和纵梁焊接的结构,则优选将电机支座固定在车架10的底面,能够使得车架10的重量直接传递到电机支座上,而不是通过紧固件传递到电机支座上,能够提高支撑能力,避免紧固件的损坏。车架10和电机支座之间设置有减震垫,减震垫能够缓冲地面传递到车架10的振动,保证货物搬运过程的稳定性,同时,降低由于车架10振动导致的车架10上安装部件的松动并且保证焊接位置在长期使用后的牢固性,保证安全并降低维修频率。另外,本实用新型在前梁2与车架10之间设置有减震块,在电机支座和车架10之间设置有减震垫,采用减震块和减震垫的形式而不采用弹簧减震的结构,在安装结构上相对简单,底盘在堆积货物后上下起伏不大,能够保证货物堆积后的稳定性。
35.如图1所示,车架10整体成凸字型,凸字形的车架10在前部的两侧形成容纳前轮1
转向的空间。车架10整体由多根横梁和纵梁焊接而成,梁与梁之间的空间在安装安装板17后可以用于安装各附属结构(第一电池组9、第二电池组12、转向舵机8及减速箱18等等)。横梁和纵梁为金属管件,金属管件可以为方管也可以为圆管,为了减轻重量,金属管件可以采用中空结构,但要保证足够的强度。
36.行走控制器11通过通信线20与无线接收模块4进行电连接,能够将无线接收模块4接收到的控制信号传递到行走控制器11,进而驱动行走电机16转动,实现后轮13的转动行走,通信线20优选采用屏蔽线,屏蔽线能够屏蔽外界信号的干扰,使得信号传递过程中避免电磁干扰,保证控制效果。
37.行走电机16可以采用无刷电机,例如:采用轮椅电机,型号:250w轮椅电机ltd03
‑
00;额定电压:dc24v;额定功率:250w;空载转速:120rpm;传动比:17:1。
38.无刷电机连接有电子差速控制器和电磁制动器14(或者电磁失电制动器),电子差速控制器可以控制两侧的无刷电机实现速度差,从而在过转弯时、一边出现打滑时或者经过坑洼路面时等等,都可以通过控制后轮13的速度保证稳定的行走效果。电磁制动器14(或者电磁失电制动器)能够对车辆进行制动。
39.在无刷电机及其安装的电子差速控制器、电磁制动器14的外部设置有防护罩15,能够使得电子部件防尘防水,保证无刷电机及其附件的工作环境。
40.本实用新型中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。