一种
γ
相机载带机器人
技术领域
1.本实用新型涉及核工业领域,具体的说涉及该领域内的一种γ相机载带机器人。
背景技术:
2.伽马相机是一种可探测辐射热点具体位置、强度甚至核素种类的传感器,在核工业各领域均有重要的应用。由于成像原理和提高探测精度的需求,其作业位置需要尽量接近可能的热点位置,但由于热点辐射强度的不可预知性,使用人来放置伽马相机是十分危险甚至可能带来严重后果的。故为伽马相机设计一款基于机器人技术的专用运载平台可以从根本上改变伽马相机的工作模式,使其具备离线操作能力,可以避免操作者接受到具有危险性的辐射损伤,提高作业效率。
3.机器人平台为伽马相机提供运动平台、安装支撑、通讯链路中继和能源供给等。具体来说,主要任务是为伽马相机提供移动探测能力、对环境进行探测并为操作者提供环境信息、提供障碍物等运行必备的信息、为伽马相机提供数据能源等必备支持。
4.传统的移动式机器人平台主要分为履带式和轮式平台。履带式平台具备较强的承载能力和原地转向的高机动性,适合在崎岖、松软的环境下运行。其缺点为功耗大、易沾污、难以去污、寿命有限;轮式平台多具有转向机构,虽然机动性不如履带式平台,但功耗更小,也更易于去污。不过其转向必须伴随较大的前向位移,在狭窄、拥挤的环境内作业时机动性往往难以满足要求。由于作业环境多为平坦地面、障碍物较多、空间狭小,需要机器人具有很高的灵活性,具备原地转向能力,体积小巧。
技术实现要素:
5.本实用新型所要解决的技术问题,就是提供一种可以在狭窄、拥挤的环境内灵活作业的γ相机载带机器人。
6.为了解决上述技术问题,本实用新型采用如下技术方案:
7.一种γ相机载带机器人,其改进之处在于:包括车体,在车体的左右两侧各安装两个麦克纳姆全向轮,四轮呈前后两轴平行排布,每个麦克纳姆全向轮分别由车体内的一个伺服电机独立驱动;在车体的顶部安装伽马相机云台,在云台的顶部固定安装俯仰驱动组件,在俯仰驱动组件的俯仰轴上安装抱闸装置和伽马相机;此外还在车体上安装光纤放线器,在车体的前部安装激光雷达和照明灯,在车体的前后左右各安装一个全景摄像头,在车体内安装控制上述各部件工作的控制系统和为机器人供电的电池,此外控制系统还通过上述光纤放线器上的光纤或者无线方式与控制端通信。
8.进一步的,车体采用一体式车身设计。
9.进一步的,伺服电机采用空心杯无刷电机,伺服电机与其相应的麦克纳姆全向轮之间通过法兰输出式行星减速器传动连接。
10.进一步的,俯仰驱动组件采用谐波减速器配合盘式伺服电机作为俯仰驱动结构,采用绝对位置光电编码器提供伽马相机位置信息反馈。
11.进一步的,伽马相机通过抱紧装置固定在俯仰轴上。
12.进一步的,控制系统安装在车体中部,电池均布在控制系统外围。
13.进一步的,控制系统包括工控电脑和嵌入式电脑,工控电脑负责伽马相机数据采集和转发以及处理激光雷达采集的信息;嵌入式电脑负责控制四个伺服电机分别驱动四个麦克纳姆全向轮,同时进行系统状态监控和保护。
14.进一步的,工控电脑采用研华pc104 系统,嵌入式电脑基于stm32核心处理器开发。
15.进一步的,还在车体上安装伽马相机控制盒。
16.进一步的,控制端采用平板电脑作为核心,使用手柄进行机器人运动控制。
17.本实用新型的有益效果是:
18.本实用新型所公开的γ相机载带机器人,为γ相机等核探测器提供承载和运输平台,可携带伽马相机等核探测器进入具有较高剂量率的放射性环境进行探测,执行热点定位、热点辐射强度探测、环境放射性水平探测、现场环境勘察等任务,改变以往需要人力进行搬运的弊端。
19.本实用新型所公开的γ相机载带机器人,为了提高车体的承载能力,车体采用一体式车身设计,使用车体主框架承受重力,相对传统的框架式车身刚度更高,更容易实现防水等防护。伺服电机采用空心杯无刷电机,该类型电机具有调速特性优异,功率密度高、过载能力强、效率高的优点,广泛应用于各种机器人系统中。改变传统机器人系统采用轴输出式行星减速器的方式,使用法兰输出式行星减速器。由于四轮需要承受车体重量,会产生很大的弯矩,轴输出式减速器抗弯矩能力较差,同时会增加结构宽度,降低灵活性。而法兰输出式行星减速器具有结构紧凑,体较小的优势,同时抗弯矩能力更强。由于伽马相机质量较大,俯仰所需扭矩和刚度较大,故采用谐波减速器作为俯仰驱动结构。谐波减速器具有扭矩大,传动平稳,过载能力强,轴向尺寸小,减速比大的优点,配合盘式伺服电机,可以在较小的体积内实现较大的扭矩输出,满足俯仰相机的需求。绝对位置光电编码器具有高精度的优点,角分辨率可达到0.1
°
以上。伽马相机的固定采用抱紧装置,和原厂系统采用的固定方式类似,具有较高的可靠性。工控电脑采用研华pc104 系统,具备体积小,稳定性高的优点。
附图说明
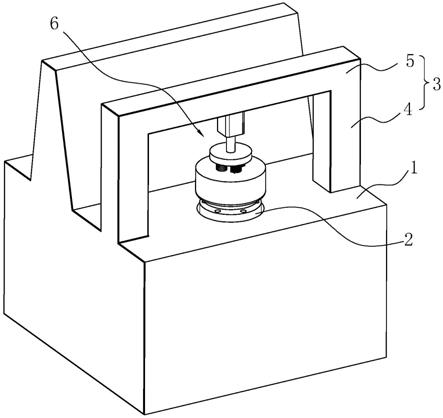
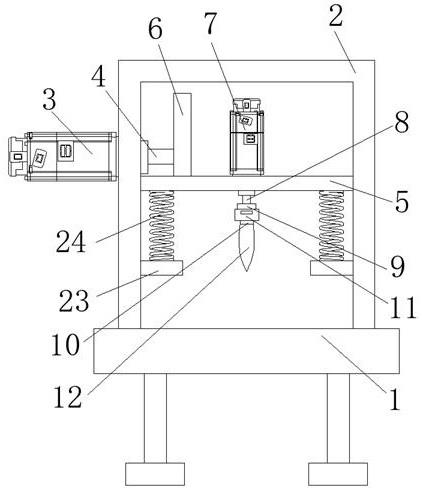
20.图1是本实用新型实施例1所公开γ相机载带机器人的结构示意图。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.实施例1,如图1所示,本实施例公开了一种γ相机载带机器人,包括车体,在车体的左右两侧各安装两个麦克纳姆全向轮1,四轮呈前后两轴平行排布,每个麦克纳姆全向轮分别由车体内的一个伺服电机独立驱动;麦克纳姆全向轮在垂直于轴线45
°
的角度上均布了若干纺锤体子轮,且外轮廓保持圆形。轮毂采用高强度铝合金制作,确保强度的前提下降低重量,纺锤体子轮采用导电橡胶材料,确保足够摩擦力的前提下避免产生静电从而吸附
灰尘造成难以去污。当四轮以特定方向和速度运行时,由于其45
°
倾斜轴设计,使其可以通过对正交速度分量的合成向平面内任意方向运动或做转动,从而具备了全向运动的能力。是机动性最高的一种底盘结构。整车采用四麦克纳姆轮设计,相对常见的三轮设计可以提高承载能力。四轮分别由独立的伺服电机驱动控制,可以精确地控制每个轮的转速和转矩,从而使车体运行精确、平稳。
23.在车体的顶部安装伽马相机云台2,在云台的顶部固定安装俯仰驱动组件3,在俯仰驱动组件的俯仰轴上安装抱闸装置和伽马相机4;由于伽马相机质量较大,在机器人加速及急停的过程中,会对俯仰驱动组件产生较大的冲击,故加入电磁抱闸刹车装置,机器人运动过程中,抱闸装置通电将俯仰轴锁死,当云台有俯仰控制指令时,抱闸松开。
24.此外还在车体上安装光纤放线器5,在车体的前部安装激光雷达6和照明灯7,在车体的前后左右各安装一个全景摄像头8,在车体内安装控制上述各部件工作的控制系统和为机器人供电的电池,此外控制系统还通过上述光纤放线器上的光纤或者无线方式与控制端通信。
25.在本实施例中,车体采用一体式车身设计。伺服电机采用空心杯无刷电机,伺服电机与其相应的麦克纳姆全向轮之间通过法兰输出式行星减速器传动连接。俯仰驱动组件采用谐波减速器配合盘式伺服电机作为俯仰驱动结构,采用绝对位置光电编码器提供伽马相机位置信息反馈,对伽马相机进行角度检测,以防其和车体发生干涉碰撞。伽马相机通过抱紧装置固定在俯仰轴上。
26.由于车体为轴对称且中心对称结构,故所有设备安放必须考虑重心和几何中心的重合,故将控制系统安装在车体中部,电池均布在控制系统外围。
27.控制系统包括工控电脑和嵌入式电脑,工控电脑负责伽马相机数据采集和转发以及处理激光雷达采集的信息;嵌入式电脑负责控制四个伺服电机分别驱动四个麦克纳姆全向轮,同时进行系统状态监控和保护。
28.工控电脑采用研华pc104 系统,嵌入式电脑基于stm32核心处理器开发,主要负责向电机驱动器转发指令同时进行系统状态监控和保护。采用此种系统控制结构可以将伽马相机和机器人控制系统有机融合,从而简化系统结构,提高可靠性。
29.还在车体上安装伽马相机控制盒9。
30.机械搭载后需要考虑控制信号和电源系统的搭载,伽马相机使用pc软件进行处理,并使用其专用的数据处理器,机器人携带pc104 系统,可运行伽马相机所需要的操作系统和软件环境,如其软件开放api,可将结果实时传输给控制端,如不开放api,可通过远程桌面等方式实时观察图片或读取数据。伽马相机所需系统电源可由机器人本体电池通过dc/dc模块进行变压和滤波后提供。
31.车体携带激光雷达,负责对前方障碍物轮廓进行探测并通过slam(simultaneous localization and mapping)技术进行未知环境地图构建,为后续探测和处理提供依据。同时为提高视频导航效率和准确率,在车体的前后左右四面各安装一台广角摄像机(全景摄像头),通过视频拼接方式获得机器人周边360
°
的全景图像,方便操作者掌握全局信息。
32.控制端采用平板电脑作为核心,使用专用控制手柄进行机器人运动控制。基于windows系统开发可以兼容伽马相机的控制软件,并可进行激光雷达数据处理,从而完成环境地图构建和蔽障任务。
33.对于系统通讯链路,采用无线/有线双模式进行工作,当环境屏蔽不强或者在室外环境时,可以采用无线方式提高机体的灵活性;但是大多数核设施内均有较强的屏蔽性,无线传输距离有限且极不稳定,为保证机器人通讯的畅通,需要采用有线方式。传统线控采用送线的方式,需要人工操作且存在线缆被卡死的弊病,而退役设备内多障碍物和曲折,很容易发生线缆卡死,故拟采用自动送线结构,送线装置(光纤放线器)根据机器人行走的距离放出等长线缆,并可以检测线缆的张紧程度保证不会发生断裂。传输线缆使用光纤代替传统的铜线传输,使线缆更细同时抗干扰能力更强。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。