1.本实用新型属于空调制造技术领域,具体涉及一种空调热交换器抓取抓手。
背景技术:
2.空调热交换器的外形通常随终端产品的不同而存在巨大差异,根据终端产品的功能不同,空调热交换器的形状存在c形、l型、g型等,且不同形状的空调热交换器在尺寸上相差较大,相同形状的空调热交换器其外形尺寸也存在较大差异。在空调产品生产过程中,空调热交换器混产是很普遍的现象,传统生产过程中普遍使用人工进行空调热交换器的搬运与组装,由于单个热交换器通常较重,该种方式存在生产效率低、工人工作强度大、现场安全隐患高、用人工数量多等问题。
3.随着机器人及相关技术的快速发展与成熟,目前工业机器人末端负载可达上百公斤,通过配合工业机器人快速交换装置,一台工业机器人可以通过更换不同形式的抓手来适应不同类型的空调热交换机产品,使得通过机器人自动化设备替换人工完成产品的搬运与组装成为了可能,如专利cn2017113424439公开了一种分度盘式热交换器装备设备,将上层热交换器板和下层热交换器板放置到第一工位的工装上,然后分度盘带动第一工位的工装转动到第二工位,对齐装置的第一气缸推动定位板,定位板推动上层热交换器板和下层热交换器板的一端对齐,工装上的挡块能限定下层热交换器板被推动的距离,保证上层热交换器板和下层热交换器板对齐。然后锁螺丝装置对上层热交换器板和下层热交换器板进行自动缩紧动作,锁紧完成后,分度盘带动第二工位的工装转动到第三工位,出料机械手抓取装配好的热交换器并移走,出料机械手可沿直线导轨移动,分度盘带动第三工位的空工装转动到第四工位,继续进行下一个循环的装配。
技术实现要素:
4.本实用新型的目的在于提供一种空调热交换器抓取抓手,实现空调的自动化生产。
5.为实现上述目的,本实用新型涉及的空调热交换器抓取抓手,包括机械框架、固定夹爪和视觉检测系统,机械框架上部与机器人末端手腕连接,视觉检测系统固定在机械框架侧边,用于获取产品位置信息,至少两个固定夹爪固定在机械框架底部,所述固定夹爪包括左右对称设置的左夹爪单元和右夹爪单元,热交换器置于左夹爪单元和右夹爪单元之间的夹持通道内,随左夹爪单元和右夹爪单元相向运动实现夹取,多个固定夹爪一字型设置,实现直线方向上热交换器多个位点的夹持。
6.本实用新型涉及的固定夹爪的左夹爪单元和右夹爪单元结构相同且左右对称设置,均包括固定机构、电动执行机构、导向机构、夹板、缓冲垫和压力检测传感器,电动执行机构固定在固定机构上通过电动推杆与夹板连接,带动夹板相对固定机构做往复运动,在靠近固定机构的夹板一侧固定导向机构,导向机构与固定机构上的轴承滑动连接,用于电动执行机构带动夹板往复运动时的辅助导向,在靠近固定机构的夹板一侧固定缓冲垫,在
远离固定机构的夹板一侧固定压力检测传感器,固定夹爪的左夹爪单元和右夹爪单元均通过固定机构固定在机械框架上。
7.具体地,所述空调热交换器抓取抓手,还包括浮动抓手、变距机构,浮动夹爪包括左夹爪单元、右夹爪单元和安装支撑机构,浮动夹爪的左夹爪单元和右夹爪单元具体结构与固定夹爪的左夹爪单元和右夹爪单元相同,浮动夹爪的左夹爪单元和右夹爪单元之间形成的夹持通道与固定夹爪的左夹爪单元和右夹爪单元之间形成的夹持通道平行,变距机构固定在机械框架上,变距机构与浮动抓手连接带动浮动抓手在浮动抓手形成的抓取通道方向上往复运动。
8.具体地,浮动夹爪的左夹爪单元和右夹爪单元左右对称设置,均包括固定机构、电动执行机构、导向机构、夹板、缓冲垫和压力检测传感器,电动执行机构固定在固定机构上通过电动推杆与夹板连接,带动夹板相对固定机构做往复运动,在靠近固定机构的夹板一侧固定导向机构,导向机构与固定机构上的轴承滑动连接,用于电动执行机构带动夹板往复运动时的辅助导向,在靠近固定机构的夹板一侧固定缓冲垫,在远离固定机构的夹板一侧固定压力检测传感器,浮动夹爪对应的左夹爪单元和右夹爪单元的固定机构均固定在安装支撑机构上。
9.具体地,变距机构包括第一支撑座、气缸、接头、导向轴、滑动轴承座、第二支撑座和第三支撑座,气缸尾部固定在第一支撑座上,气缸上的推杆端部安装有接头并通过接头与安装支撑机构连接,至少两个平行设置的滑动轴承座固定在安装支撑机构上部,且变距机构的滑动轴承座与浮动抓手的夹板平行设置,导向轴与滑动轴承座滑动连接,导向轴一端固定第二支撑座,第三支撑座固定在安装支撑机构上部,第一支撑座、第二支撑座和第三支撑座均固定在机械框架上。
10.本实用新型涉及的视觉检测单元包括安装架、安装件、视觉相机和照明设备,安装架连接在机械框架一侧,视觉相机和照明设备通过安装件固定在安装架末端,视觉相机实时采集热交换器的位置信息,照明设备根据实际需要为视觉相机提供照明。
11.与现有技术相比,本实用新型的有益效果是:
12.通过固定夹爪实现尺寸和型号相差不大的多种热交换器的抓取,通过浮动夹爪进一步增加可抓取热交换器的型号和种类,实现空调热交换器的自动化搬运,有利于提高生产线的生产效率、降低工人劳动强度、极大降低安全风险,可以帮助企业减少人工使用,更好的降本增效。
附图说明
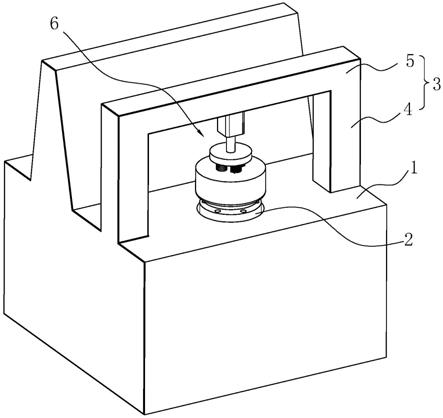
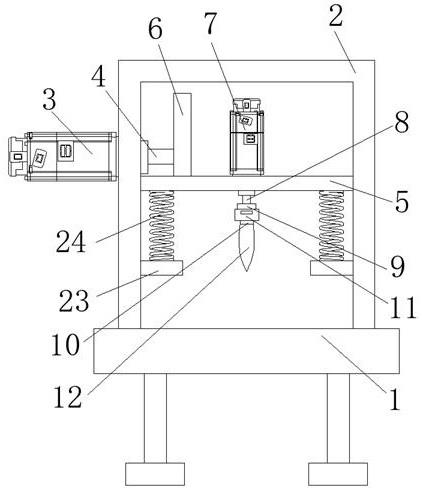
13.图1为本实用新型涉及的空调热交换器抓取抓手的立体结构图。
14.图2为本实用新型涉及的固定夹爪的立体结构图。
15.图3为本实用新型涉及的固定夹爪部分结构立体结构图。
16.图4为本实用新型涉及的浮动夹爪的立体结构图。
17.图5为图1中a部分的结构放大图。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.实施例:
20.本实施例涉及的空调热交换器抓取抓手,包括机械框架1、固定夹爪2和视觉检测系统5,机械框架1上部与机器人末端手腕连接,视觉检测系统5固定在机械框架1侧边,用于获取产品位置信息,至少两个固定夹爪2固定在机械框架1底部,所述固定夹爪2包括左右对称设置的左夹爪单元和右夹爪单元,热交换器置于左夹爪单元和右夹爪单元之间的夹持通道内,随左夹爪单元和右夹爪单元相向运动实现夹取,多个固定夹爪2一字型设置,实现直线方向上热交换器多个位点的夹持。
21.本实施例涉及的固定夹爪2的左夹爪单元201和右夹爪单元202结构相同且左右对称设置,均包括固定机构207、电动执行机构208、导向机构203、夹板204、缓冲垫205和压力检测传感器206,电动执行机构208固定在固定机构207上通过电动推杆与夹板204连接,带动夹板204相对固定机构207做往复运动,在靠近固定机构207的夹板204一侧固定导向机构203,导向机构203与固定机构207上的轴承209滑动连接,用于电动执行机构208带动夹板204往复运动时的辅助导向,具体地,导向机构203为导向杆,在靠近固定机构207的夹板204一侧固定缓冲垫205,在远离固定机构207的夹板204一侧固定压力检测传感器206,固定夹爪2的左夹爪单元和右夹爪单元均通过固定机构207固定在机械框架1上。将热交换器放置在左夹爪单元和右夹爪单元对应的夹板204之间的通道内,夹板204在对应电动执行机构208的带动下同时相向运动,压力检测传感器206实时检测施加到夹板204上的压力,当压力检测传感器206达到设定值时,电动执行机构208停止,完成夹持。
22.多个固定夹爪2一字型设置,能够实现直线方向上热交换器多个位点的夹持,上述空调热交换器抓取抓手适用于抓取l形和c形热交换器。但在抓取g形热交换器时,抓取不稳定,容易掉落,且由于规格不同,g形热交换器尺寸之间存在差异,为此,在上述空调热交换器抓取抓手的基础上,增加一可移动的抓手,且该移动抓手的抓取通道与固定抓手的抓取通道平行。具体地,所述空调热交换器抓取抓手,还包括浮动抓手3、变距机构4,浮动夹爪3包括左夹爪单元301、右夹爪单元302和安装支撑机构303,浮动夹爪3的左夹爪单元和右夹爪单元具体结构与固定夹爪2的左夹爪单元和右夹爪单元相同,浮动夹爪3的左夹爪单元和右夹爪单元之间形成的夹持通道与固定夹爪2的左夹爪单元和右夹爪单元之间形成的夹持通道平行,变距机构4固定在机械框架1上,变距机构4与浮动抓手5连接带动浮动抓手5在浮动抓手5形成的抓取通道方向上往复运动,进而实现了不同规格g形热交换器的抓取。
23.具体地,浮动夹爪3的左夹爪单元301和右夹爪单元302左右对称设置,均包括固定机构207、电动执行机构208、导向机构203、夹板204、缓冲垫205和压力检测传感器206,电动执行机构208固定在固定机构207上通过电动推杆与夹板204连接,带动夹板204相对固定机构207做往复运动,在靠近固定机构207的夹板204一侧固定导向机构203,导向机构203与固定机构207上的轴承209滑动连接,用于电动执行机构带动夹板往复运动时的辅助导向,具体地,导向机构203为导向杆,在靠近固定机构207的夹板204一侧固定缓冲垫205,在远离固定机构207的夹板204一侧固定压力检测传感器206,浮动夹爪3对应的左夹爪单元和右夹爪单元的固定机构207均固定在安装支撑机构303上。
24.具体地,变距机构4包括第一支撑座401、气缸402、接头403、导向轴404、滑动轴承座405、第二支撑座406和第三支撑座407,气缸402尾部固定在第一支撑座401上,气缸402上的推杆端部安装有接头403并通过接头403与安装支撑机构303连接,至少两个平行设置的滑动轴承座405固定在安装支撑机构303上部,且变距机构4的滑动轴承座405与浮动抓手3的夹板204平行设置,导向轴404与滑动轴承座405滑动连接,导向轴404一端固定第二支撑座406,第三支撑座407固定在安装支撑机构303上部,第一支撑座401、第二支撑座406和第三支撑座407均固定在机械框架1上。当接收到换产命令,需要将l形或c形热交换器换为g形热交换器时,根据g形热交换器的型号大小,气缸402动作,带动推杆伸出或收回,继而带动浮动夹爪3沿着导向轴404达到合适的位置,带动浮动抓手5在浮动抓手5形成的抓取通道方向上往复运动,以适应换产后的g形热交产品的抓取。
25.本实施例涉及的视觉检测单元5包括安装架501、安装件502、视觉相机503和照明设备504,安装架501连接在机械框架1一侧,视觉相机503和照明设备504通过安装件502固定在安装架501末端,视觉相机503实时采集热交换器的位置信息,照明设备504根据实际需要为视觉相机503提供照明。
26.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。