1.本实用新型涉及水导激光加工领域,具体地说是一种基于多触点的水射流定位装置及方法。
背景技术:
2.水导激光加工技术是一种新型激光加工技术,其利用载有高能激光的稳定水射流实现材料去除。由于水射流喷嘴工作条件恶劣,属于需要定期更换的部件,但是由于不同水射流喷嘴存在一定加工误差,更换水射流喷嘴后产生的水射流位置与轴线方向存在细微差别,而为了保证水射流位置与轴线方向的一致性,现有技术中通常需要人工手动进行水射流位置重新标定,但是这种方法效率较低且标定精度受操作人员技术水平影响较大。
技术实现要素:
3.本实用新型的目的在于提供一种基于多触点的水射流定位装置及方法,可以在更换水导激光加工模块中的部分组件后自动检测水射流位置与角度的变化并自动实现位置补偿。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种基于多触点的水射流定位装置,包括运动底座、微调元件、运动底座驱动机构、可伸缩底座、力传感器和感应片,其中运动底座安装于所述运动底座驱动机构上,且所述运动底座具有x、y、z三个方向的移动自由度,水导激光加工模块通过多个微调元件支撑安装于所述运动底座上,可伸缩底座前端设有射流孔,且所述水导激光加工模块发出的水射流穿过所述射流孔,所述射流孔的x向两侧以及y向两侧均设有力传感器,且每个力传感器上均设有感应片,当水射流与感应片接触时触发对应的力传感器向所述检测控制系统发出信号,所述运动底座驱动机构和微调元件均通过所述检测控制系统控制。
6.所述水导激光加工模块上端设有模块法兰,且所述微调元件上端与所述模块法兰外缘铰接。
7.所述运动底座上设有一个限位孔,且所述水导激光加工模块下端穿过所述限位孔。
8.所述水导激光加工模块偏转运动范围为
±
10
°
。
9.所述射流孔的x向两侧分别设有第一感应片和第二感应片,所述射流孔的y向两侧分别设有第三感应片和第四感应片。
10.本实用新型的优点与积极效果为:
11.1、本实用新型可以在更换水导激光加工模块中的部分组件后自动测量水射流位置与角度的变化并实现自动位置补偿,保证更换后水射流在加工设备坐标系内的位置关系不变。
12.2、本实用新型能够自动实现标定,无需人工参与,大大提高了标定效率和标定精度。
附图说明
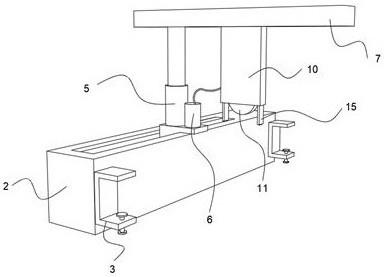
13.图1为本实用新型的结构示意图,
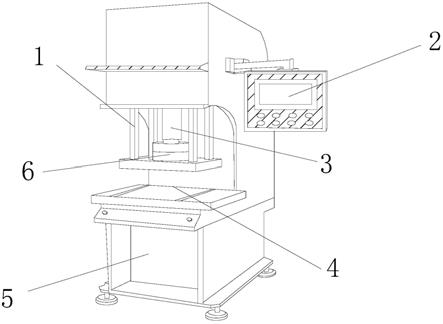
14.图2为本实用新型水射流偏转角度校正示意图,
15.图3为图2中水射流偏转角度计算原理示意图,
16.图4为本实用新型水射流平移位置校正示意图。
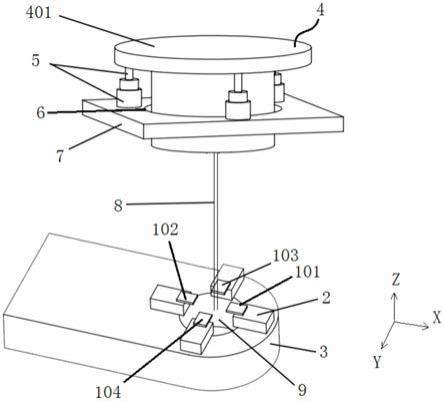
17.其中,101为第一感应片,102为第二感应片,103为第三感应片,104为第四感应片,2为力传感器,3为可伸缩底座,4为水导激光加工模块,401为模块法兰,5为微调元件,6为限位孔,7为运动底座,8为水射流,9为射流孔。
具体实施方式
18.下面结合附图对本实用新型作进一步详述。
19.如图1~4所示,本实用新型包括运动底座7、微调元件5、运动底座驱动机构、可伸缩底座3、力传感器2、感应片和检测控制系统,其中运动底座7安装于所述运动底座驱动机构上,且所述运动底座7具有x、y、z三个方向的移动自由度,水导激光加工模块4通过多个微调元件5支撑安装于所述运动底座7上,可伸缩底座3前端设有射流孔9,且所述水导激光加工模块4发出的水射流8穿过所述射流孔9,所述射流孔9的x向两侧以及y向两侧均设有力传感器2,且每个力传感器2上均设有感应片,当水射流8与感应片接触时触发对应的力传感器2向所述检测控制系统发出信号,所述运动底座驱动机构和微调元件5均通过所述检测控制系统控制。
20.本实施例中,所述运动底座驱动机构为一个具有x、y、z自由度的桁架机械手,所述运动底座7安装于所述机械手上以实现位置调整,所述桁架机械手为本领域公知技术且为市购产品,本实施例中,所述桁架机械手采购于新松机器人自动化股份有限公司。
21.本实施例中,所述可伸缩底座3安装于一个气缸缸杆端部,所述可伸缩底座3即通过所述气缸驱动实现伸缩移动。
22.本实施例中,所述微调元件5可采用具有自锁功能或自带锁定机构的微型电动推杆,如图1所示,所述水导激光加工模块4上端设有模块法兰401,所述微型电动推杆上端与所述模块法兰401外缘铰接,这样各个微型电动推杆可配合升降调整水导激光加工模块4的偏转角度,当水导激光加工模块4位置确定后,所述微型电动推杆的自锁功能或自带的锁定机构保证水导激光加工模块4与运动底座7之间的位置不再发生变化。所述微型电动推杆为本领域公知技术且为市购产品。
23.如图1所示,本实施例中,沿着水导激光加工模块4圆周方向共设有三个微调元件5,其中两个微调元件5配合升降可用于调整水导激光加工模块4的x向偏转,然后这两个微调元件5保持不动(也即x向不发生偏转),另一个微调元件5升降可用于调整水导激光加工模块4的y向偏转。所述微调元件5的数量和位置可以根据实际需要具体设定。
24.如图1所示,所述运动底座7上设有一个限位孔6供所述水导激光加工模块4下端穿过,同时所述限位孔6可限定水导激光加工模块4的偏转范围。本实施例中,所述水导激光加工模块4偏转运动范围为
±
10
°
。
25.所述力传感器2上安装有感应片并可以经由电信号输出感应片1的受力,当力传感器2受力大于某个阈值后,可输出高电平电信号,本实施例中的力传感器2受力阈值范围为
0.1n~10n,位置相对的两个力传感器2上的感应片端部之间的距离范围为0.1mm~5mm。所述力传感器2为本领域公知技术且为市购产品。
26.本实用新型的工作原理为:
27.如图1所示,所述射流孔9的x向两侧分别设有第一感应片101和第二感应片102,所述射流孔9的y向两侧分别设有第三感应片103和第四感应片104,本实用新型的水射流定位方法包括如下步骤:
28.步骤一:水导激光加工模块4与感应片初步定位,首先可伸缩底座3伸出,然后运动底座7带动水导激光加工模块4运动直至水射流8进入可伸缩底座3前端的射流孔9中,然后运动底座7沿着z轴负方向下降运动直至水导激光加工模块4底部与感应片之间的距离小于10mm。
29.步骤二:初定位完成后,如图2所示,运动底座7先向x轴正方向低速运动直至水射流8与第一感应片101接触,第一感应片101对应的力传感器2输出高电平,检测控制系统记录此时运动底座7位置坐标x1,然后运动底座7沿z轴正方向向上移动距离z1,然后运动底座7向x轴负方向运动直至第一感应片101对应的力传感器2输出变为低电平,然后运动底座7再次向x轴正方向低速运动直至水射流8与第一感应片101再次接触,第一感应片101对应的力传感器2再次输出高电平,检测控制系统记录此时运动底座位置坐标x2,然后如图3所示,检测控制系统根据确定的位置坐标x1、x2以及距离z1通过三角关系计算水射流8沿x方向的倾转角度α。
30.步骤三:检测控制系统控制相应的微调元件5升降调整使水导激光加工模块4偏转补偿步骤二中确定的倾转角度α,以消除水射流8沿x方向的倾转使其垂直。
31.步骤四:如图4所示,消除水射流8沿x方向的倾角后,运动底座7向x轴负方向运动直至第一感应片101对应的力传感器2输出变为低电平,然后运动底座7再次向x轴正方向低速运动直至第一感应片101对应的力传感器2输出高电平,检测控制系统记录此时运动底座7位置坐标x3,然后运动底座7向x轴负方向反向低速运动,直至第二感应片102对应的力传感器2输出高电平,检测控制系统记录此时运动底座7位置坐标x4,然后检测控制系统比较x3、x4的位置差值与第一感应片101和第二感应片102之间理论距离的差值,该差值即为水射流8直径d,标定水射流8沿x向的直径d,并且计算(x3 x4)/2与射流孔9中心坐标沿x向差值,然后运动底座7沿x向移动对水射流8位置坐标进行补偿,使水射流8位于射流孔9的x向中心处。
32.步骤五:然后运动底座7向y轴正方向低速运动直至水射流8与第三感应片103接触,第三感应片103对应的力传感器2输出高电平,检测控制系统记录此时运动底座7位置坐标y1,然后运动底座7沿z轴正方向向上移动z2,并且运动底座7向y轴负方向运动直至第三感应片103对应的力传感器2输出变为低电平,然后运动底座7再次向y轴正方向低速运动直至水射流8与第三感应片103再次接触,第三感应片103对应的力传感器2再次输出高电平,检测控制系统记录此时运动底座7位置坐标y2,然后检测控制系统根据位置坐标y1、y2以及距离z2三角关系计算水射流8沿y方向的倾转角度,计算原理与步骤二相同。
33.步骤六:检测控制系统控制相应的微调元件5升降调整使水导激光加工模块4偏转步骤五中确定的y方向的倾转角度,以消除水射流8沿y方向的倾转使其垂直。
34.步骤七:消除水射流8沿y方向的倾角后,运动底座7向y轴负方向运动直至第三感
应片103对应的力传感器2输出变为低电平,然后运动底座7再次向y轴正方向低速运动直至第三感应片103对应的力传感器2输出高电平,检测控制系统记录此时运动底座7位置坐标y3,然后运动底座7向y轴负方向反向低速运动,直至第四感应片104对应的力传感器2输出高电平,检测控制系统记录此时运动底座7位置坐标y4,然后检测控制系统比较y3、y4的位置差值与第三感应片103和第四感应片104之间理论距离的差值,该差值即为水射流8直径d,标定水射流8沿y向的直径d,并且计算(y3 y4)/2与射流孔9中心坐标的沿y向差值,然后运动底座7沿y向移动对水射流8位置坐标进行补偿,使水射流8位于射流孔9的y向中心处。
35.步骤八:上述调整完毕后,检测控制系统控制微调元件5锁定,进而将水导激光加工模块4与运动底座7之间的相对位置锁定,可伸缩底座3收回,从而完成水射流8的定位流程。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。