1.本技术涉及夹具技术领域,尤其是涉及一种高效夹持轴承箱的夹具。
背景技术:
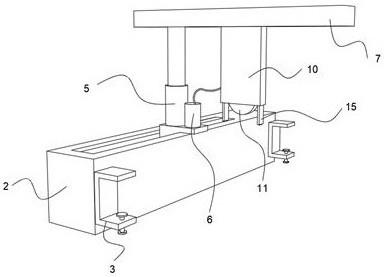
2.参照图1,一种发电机的轴承箱包括箱体10,在箱体侧边设置有安装边11、第一通孔以及连接孔,在连接孔上安装有延伸筒12,在延伸筒12远离箱体一侧设置有法兰边13。
3.在使用数控机床对这种轴承箱进行机加工时,需要人工操作夹具,将轴承箱稳固地夹持在夹具上,再对轴承箱进行机加工,机加工完成后,需要人工拧松夹具的夹持件以取出完成加工后的轴承箱。
4.针对上述中的相关技术,发明人认为通过人工操作夹具的方式来夹持或放松轴承箱的加工效率较低,从而影响轴承箱的生产效率,对此有待进一步改进。
技术实现要素:
5.为了便于对轴承箱进行夹持以进行机加工,以提高轴承箱的生产效率,本技术提供一种高效夹持轴承箱的夹具。
6.本技术提供的一种高效夹持轴承箱的夹具采用如下的技术方案:
7.一种高效夹持轴承箱的夹具,包括安装在机架上用于固定箱体的工作板、安装在工作板上用于夹持箱体的夹持组件、对称安装在工作板上用于夹持箱体安装边的第一夹持块、对称安装在工作板上用于夹持箱体法兰边的第二夹持块以及安装在工作板上用于驱动第一夹持块和第二夹持块夹持和放松箱体的驱动组件。
8.通过采用上述技术方案,安装工作板、夹持组件、第一夹持块、第二夹持块以及驱动组件,可以通过驱动组件带动第一夹持块和第二夹持块同时夹持箱体的安装边和法兰边,此外,通过夹持组件进一步地同步夹持箱体的底部,从而使夹具能快速且多方位地夹持箱体,继而可以提高稳固夹持箱体的效率,以提高箱体的加工效率。
9.可选的,所述驱动组件包括安装在工作板上的多个液压缸,所述第一夹持块以及第二夹持块分别安装在不同的液压缸的输出端上。
10.通过采用上述技术方案,通过安装液压缸,可以为第一夹持块与第二夹持块提供夹持箱体的夹持力,能稳固地夹持箱体,同时,还能便于对所有的液压缸统一控制,从而提高第一夹持块与第二夹持块的夹持效率。
11.可选的,所述工作板上安装有用于控制多个液压缸驱动的液压阀,所述工作板上安装有接触传感器,所述接触传感器与液压阀电连接。
12.通过采用上述技术方案,安装液压阀以及接触传感器,当箱体放置在工作板上时,接触传感器就会传递一个信号给液压阀,以驱动液压缸来带动相对应的第一夹持块和第二夹持块对箱体进行夹持,从而可以减少人工打开开关的麻烦,以进一步地提高夹持箱体的效率。
13.可选的,所述夹持组件包括安装在工作板上用于夹持箱体底部的爪盘,所述爪盘
上安装有多个与箱体侧边相适配的爪臂。
14.通过采用上述技术方案,通过安装爪盘和爪臂,可以便于对箱体底部进行夹持,从而提高箱体夹持的效率,结构简单,使用成本较低。
15.可选的,所述工作板上对称布置安装有用于对箱体延伸筒两侧进行限位的两个限位柱,所述限位柱相对一面均安装有第一限位块。
16.通过采用上述技术方案,安装限位柱以及第一限位块,可以对箱体延伸筒进行初步的定位,从而提高箱体的夹持效率。
17.可选的,所述工作板上安装有用于限制箱体顶部法兰的多个第二限位块。
18.通过采用上述技术方案,安装第二限位块,可以便于稳固的将箱体放置在卡盘上,使箱体顶部法兰与工作板相平,减少因箱体未放平而使夹持组件、第一夹持块以及第二夹持块夹坏箱体的情况,以提高箱体夹持的精准性,此外,箱体的夹持位置准确就能使箱体的夹持更加稳固。
19.可选的,所述爪臂靠近爪盘中心的侧面对称安装有加固块,所述加固块位于爪臂远离工作板一边的两个角落。
20.通过采用上述技术方案,安装加固块,可以提高夹臂的夹持稳固性,以更加稳固地夹持箱体底部,同时,减少夹臂与箱体的接触面积,从而可以更好地保护箱体的表面。
21.可选的,所述第一夹持块和第二夹持块与箱体相接触的一侧安装有保护头。
22.通过采用上述技术方案,安装保护头,可以减少第一夹持块和第二夹持块由于夹持力较大而导致箱体表面出现压痕的情况,从而可以进一步地保护箱体。
23.可选的,所述工作板靠近液压缸的位置均安装有用于对液压缸输出端进行导向的导向套筒。
24.通过采用上述技术方案,安装导向套筒,对液压缸的输出端进行导向,可以使液压缸输出端的运动更加稳定且准确,从而可以提高第一夹持块以及第二夹持块的夹持准确度,以提高箱体的夹持稳固性。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.通过安装第一夹持块、第二夹持块、液压缸、液压阀以及接触传感器,可以使工人将箱体放入工作板上时,自动对箱体进行夹持,从而可以提高箱体夹持的效率,以提高箱体加工的效率;
27.2.通过安装爪盘、爪臂以及加固块,可以便于对箱体的底部进行夹持,从而可以更加稳固的夹持箱体,为加工箱体提供稳固的支撑环境。
附图说明
28.图1是本技术实施例中箱体的结构示意图。
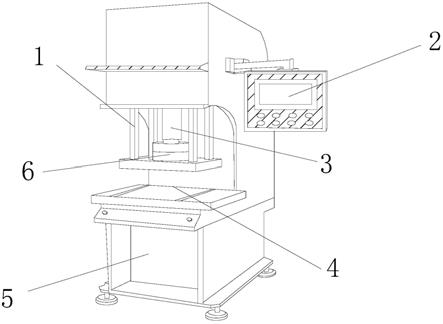
29.图2是本技术实施例的整体结构示意图。
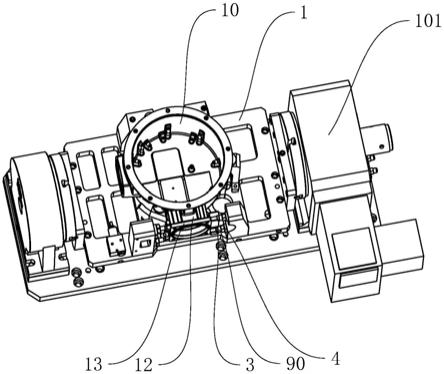
30.图3是本技术实施例中第二夹持块的结构示意图。
31.图4是本技术实施例中第一夹持块的结构示意图。
32.附图标记说明:1、工作板;10、箱体;101、机架;102、支撑柱;11、安装边;12、延伸筒;13、法兰边;2、第一夹持块;3、第二夹持块;4、液压缸;5、液压阀;50、接触传感器;6、爪盘;60、爪臂;61、加固块;7、限位柱;70、第一限位块;8、第二限位块;9、保护头;90、导向套
筒。
具体实施方式
33.以下结合附图1
‑
4对本技术作进一步详细说明。
34.参照图1,为加工一种箱体10,需要使用夹具将箱体10夹持在机架101上,再使用加工设备对箱体10进行加工,其中,箱体10的侧边竖直设置有安装边11以及开设有第一通孔和连接孔,在连接孔上安装有延伸筒12,在延伸筒12远离箱体10一侧设置有法兰边13,箱体10的顶部设置有顶部法兰,底部设置有多条散热筋。
35.在对箱体10加工过程中,需要工人手动拧动夹具来夹持箱体10,操作麻烦且效率低下,同时,夹持位置不够精准,由于手动误差,容易使夹持位置不均匀,从而导致加工后的箱体10的加工质量不均匀,因此,需要进一步改进箱体10的夹持方式。
36.本技术实施例公开一种高效夹持轴承箱的夹具。
37.参照图2,高效夹持轴承箱的夹具包括安装在机架101的工作板1,在本实施例中,工作板1的两边开设有多个散热孔,这些散热孔还可以减少工作板1的材料成本,工作板1通过螺丝可拆卸式安装在机架101上,以便于安装和拆卸工作板1。
38.参照图3,在工作板1上中部安装有夹持组件,夹持组件可以夹持箱体10的底部,夹持组件包括安装在工作板1中部的爪盘6,爪盘6包括卡盘体、卡爪以及卡爪驱动机构,卡爪驱动机构安装在卡盘体上,卡爪滑动安装在卡盘体上,通过卡爪驱动机构可以带动卡爪滑动,从而可以使卡爪夹持工件。
39.在本实施例中,爪盘6采用三爪卡盘,在爪盘6卡爪远离爪盘6中心的一侧设置有爪臂60,在爪臂60靠近爪盘6中心的一侧面对称安装有两个加固块61,加固块61分布在爪臂60远离工作板1一侧的两个角落位置上。
40.通过爪盘6带动爪臂60夹持箱体10的侧边,其中,爪臂60上的加固块61接触箱体10的侧边,从而可以对箱体10的底部侧边进行夹持,以初步稳固地夹持箱体10。
41.为了进一步稳固箱体10,在本实施例中,在工作板1靠近爪盘6的边缘位置安装有多个支撑柱102,其中四个支撑柱102位于工作板1的两侧且对称分布,在支撑柱102上安装有驱动组件,驱动组件包括对称安装在两相对称分布的两组支撑柱102相对一侧面的液压缸4,在支撑柱102位于液压缸4输出端位置上螺纹可拆卸式安装有导向套筒90。
42.在其一组相对称的支撑柱102上的液压缸4输出端上均安装有第一夹持块2,在另一组相对称的支撑柱102上的液压缸4输出端上均安装有第二夹持块3,第一夹持块2用于夹持箱体10的安装边11,第二夹持块3用于夹持箱体10的法兰边13。
43.为了能更加稳固且准确地夹持箱体10的法兰边13,在本实施例中,第二夹持块3设置有相对称的两组,每组第二夹持块3设置有两个。
44.为了减少由于第一夹持块2以及第二夹持块3与箱体10之间作用力过大而导致对箱体10外表面的损伤,在本实施例中,在第一夹持块2和第二夹持块3与箱体10相接触的一端套设有保护头9,在本实施例中,保护头9采用橡胶材料制成。
45.为了进一步提高夹持箱体10的效率,在本实施例中,在工作板1上安装有液压阀5,在爪盘6的一卡爪上安装有接触传感器50,接触传感器50与液压阀5电连接,液压阀5可以控制液压缸4的输出端运动,从而可以带动第一夹持块2和第二夹持块3夹持箱体10。
46.当工人将箱体10放置在爪盘6上时,通过驱动爪盘6夹持箱体10,同时,触发接触传感器50,使第一夹持块2和第二夹持块3夹持箱体10的安装边11和法兰边13,从而使箱体10稳固且精准的夹持在工作板1上,以利于加工设备对箱体10进行精准加工。
47.参照图4,在本实施例中,在工作板1靠近第二夹持块3的一侧对称安装有两限位柱7,限位柱7相对一侧均安装有第一限位块70,当箱体10放置在爪盘6上时,箱体10的延伸筒12限制在两第一限位块70之间,从而可以便于工人将箱体10放置在工作板1上。
48.为了进一步提高箱体10夹持位置的准确性,在本实施例中,在工作板1上安装有第二限位块8,在本实施例中,第二限位块8圆周均匀分布有三个,其中一个安装在限位柱7顶部,另外两个安装在支撑柱102顶部,第二限位块8远离工作板1一侧设置成锥型且锥尖部分均安装有球形支撑块,三个球形支撑块离第二限位块8最远一点所形成的平面与工作板1的表面相平行。
49.当工人将箱体10放置在爪盘6上时,箱体10顶部法兰刚好与三个球形支撑块接触,从而使箱体10更加端正的放置在爪盘6上,从而使箱体10的夹持位置更加精确,以提高箱体10的加工精确度。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。