1.本发明涉及浇筑机技术领域,具体涉及一种智能浇筑机及其操作方法。
背景技术:
2.在日常的建筑中通常需要用到混凝土进行浇筑水泥场地,一般在建设房屋地面、楼顶、机场、马路等场所都能会到混凝土浇筑作业,建筑行业应用的非常广泛,但是在后期的使用中,混凝土或其他材质的地面可能会出现坑洞需要及时进行修补,防止后期坑洞越来越大影响正常的使用,在修补混凝土地面时,当场所面积较大、坑洞较多时常规的人工修补方法明显效率较低,需要使用浇筑机提高工作效率,同时方便操作节省人力劳动。
3.现有技术存在以下不足:现有的浇筑方式主要还是靠人工进行操作,由人通过手扶浇筑管进行混凝土浇筑,容易造成浇筑不均匀,混凝土浇筑后容易内泡等问题,从而形成坑洞,在修补坑洞对地面进行磨平时,还需要人工检查坑洞填补情况和寻找坑洞,这种方式费时费力,生产效率低,影响产品质量。
4.因此,发明一种智能浇筑机及其操作方法很有必要。
技术实现要素:
5.为此,本发明提供一种智能浇筑机及其操作方法,通过双目立体视觉传感器与角度传感器将位置传感信息和深度数据相结合,推算出地面凹坑存在与否和凹坑距离信息,能够根据深度数组实现地面凹坑识别,螺纹柱带动压板向下移动,使浇筑机实现前后移动,当摩擦力不一致时,浇筑机旋转移动,以解决修补坑洞同时抹平地面的问题。
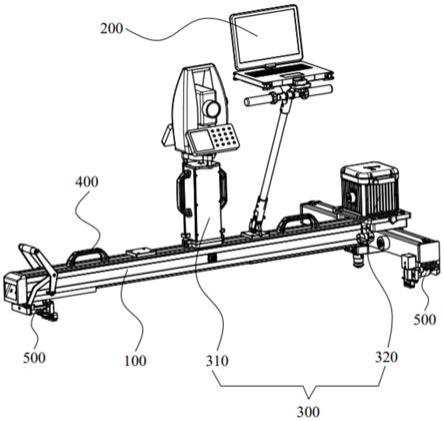
6.为了实现上述目的,本发明提供如下技术方案:一种智能浇筑机,包括浇筑装置、冲洗系统与定位装置,所述浇筑装置底部固定安装有支撑台,所述浇筑装置两侧设有定位装置,所述定位装置包括内燃机组,所述内燃机组设有两组,两组所述内燃机组分别安装在浇筑装置两侧,所述内燃机组与支撑台顶部固定连接,所述支撑台底部安装有传动轴,所述传动轴顶部与内燃机组底部输出端固定连接;
7.所述浇筑装置内壁设有储料腔,所述储料腔底部设有输料腔,所述储料腔底部固定安装有进料阀,所述输料腔内壁固定安装有输料缸,所述进料阀底部与输料缸顶部连接固定连接,所述输料缸左侧固定安装有气缸,所述气缸右侧输出端固定安装有活塞,所述活塞插接在输料缸内壁,所述浇筑装置内壁左侧固定安装有管道,所述管道底部与输料缸顶部固定连接,所述输料缸一侧固定安装有t形管,所述输料缸与t形管连接处固定安装有出料阀一,所述t形管一端设置有出水口;
8.所述传动轴外壁活动安装有导柱,所述导柱顶部与支撑台底部固定连接,所述导柱外壁固定安装有顶板,所述顶板底部固定安装有底板,所述底板顶部右侧固定安装有限位块,所述限位块设有两组,所述限位块内壁活动安装有压板,所述压板右侧顶部固定安装有支撑柱,所述支撑柱顶部设有螺纹柱。
9.优选的,所述冲洗系统包括水箱,所述水箱固定安装在支撑台顶部左侧,所述水箱
内壁固定安装有高压泵,所述水箱顶部固定安装有进水管,所述高压泵输出端与进水管固定连接,所述进水管一端与管道顶部固定连接。
10.优选的,所述支撑台右侧顶部固定安装有收集箱,所述收集箱顶部固定安装有出水管,所述出水管一端与出水口固定连接。
11.优选的,所述支撑台底部中心位置固定安装有出料阀二,所述出料阀二顶部与t形管一端固定连接。
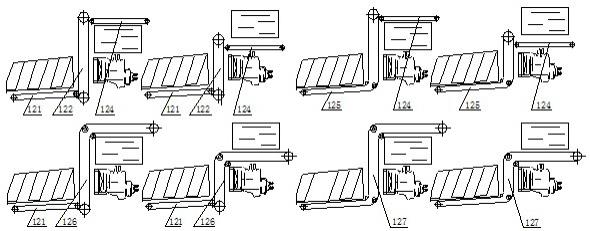
12.优选的,所述浇筑装置顶部一侧固定安装有进料头一,所述进料头一底部与储料腔内壁连接,所述浇筑装置顶部中心位置固定安装有电机一,所述电机一右侧输出端固定安装有减速机,所述储料腔内壁设有搅拌杆,所述搅拌杆顶部与减速机底部输出端固定连接。
13.优选的,所述内燃机组一侧固定安装有支撑座,所述支撑座一侧固定安装有电机二,所述电机二底部输出端与螺纹柱固定连接,所述螺纹柱外壁与支撑座内壁活动连接,所述螺纹柱底部与支撑柱内壁螺纹连接。
14.优选的,所述传动轴底部固定安装有转盘,所述转盘外壁固定安装有转杆,所述转杆设有四组,所述转杆底部固定安装有抹平板,所述抹平板安装角度呈45
°
,所述转杆顶部固定安装有支撑条,所述导柱外壁底部固定安装有轴承环,所述轴承环外壁固定安装有拉杆,所述拉杆一端与支撑条顶部固定连接。
15.优选的,所述支撑台一侧固定安装有双目立体视觉传感器,所述双目立体视觉传感器顶部固定安装有角度传感器,所述支撑台底部两侧固定有支撑杆,所述支撑杆设有四组,所述支撑杆底部固定安装有底座,两组所述支撑杆之间固定安装有防护网,所述支撑台顶部左侧固定安装有控制箱。
16.优选的,所述浇筑装置顶部一侧固定安装有进料头二,所述进料头二顶部固定安装有法兰。
17.一种智能浇筑机操作方法,其操作步骤为:
18.步骤一:将混凝土通过进料头一注入储料腔内;
19.步骤二:启动双目立体视觉传感器与角度传感器,将位置传感信息和深度数据相结合,推算出地面凹坑存在与否和凹坑距离信息,能够根据深度数组实现地面凹坑识别,将数据传输至控制箱;
20.步骤三:启动内燃机组,内燃机组带动传动轴旋转,传动轴驱动转盘旋转,转盘驱动四个转杆旋转,电机二驱动螺纹柱旋转,螺纹柱带动压板向下移动,使浇筑机前后与旋转移动;
21.步骤四:到达指定方位后,启动气缸推动活塞往复运动,活塞后移时吸料,进料阀放料,气缸前推时活塞将输料缸中的混凝土压入t形管,开启出料阀二,释放混凝土掉落至地面;
22.步骤五:关闭出料阀二,通过水箱用高压泵输送水进行清洗输料缸和t形管,杂质与水通过t形管与出水管进入收集箱内,完成后;
23.步骤六:电机二驱动螺纹柱旋转,螺纹柱带动压板向上移动,调整倾斜角度使抹平板一侧对地面表面的压力相等,浇筑机通过抹平板原地抹平与补洞操作。
24.本发明的有益效果是:
25.1.通过双目立体视觉传感器与角度传感器将位置传感信息和深度数据相结合,推算出地面凹坑存在与否和凹坑距离信息,能够根据深度数组实现地面凹坑识别,螺纹柱带动压板向下移动,使浇筑机实现前后移动,具有自动填补与抹平坑洞的效果;
26.2.通过控制箱控制气缸推动活塞往复运动,活塞后移时吸料,进料阀放料,气缸前推时活塞将输料缸中的混凝土压入t形管,出料阀二开启,释放混凝土掉落至地面,输送混凝土结束后,出料阀二关闭,通过水箱用高压泵输送水进行清洗输料缸和t形管,杂质与水通过t形管与出水管进入收集箱内,具有自动出料与清洗的效果。
附图说明
27.图1为本发明实施例1的左视立面结构示意图;
28.图2为本发明实施例1的浇筑装置结构示意图;
29.图3为本发明实施例1的浇筑装置剖面结构示意图;
30.图4为本发明实施例1的俯视结构示意图;
31.图5为本发明实施例1的右视立面结构示意图;
32.图6为本发明实施例1的定位装置立面结构示意图;
33.图7为本发明实施例1的定位装置正视结构示意图;
34.图8为本发明实施例1的仰视结构示意图;
35.图9为本发明实施例1的冲洗系统安装结构示意图;
36.图10为本发明实施例2的进料头二结构示意图。
37.图中:浇筑装置100、进料头一110、减速机120、搅拌杆121、电机一122、储料腔130、进料阀131、输料腔140、输料缸141、气缸142、活塞143、管道144、出料阀一145、t形管150、出水口151、出料阀二160、支撑台170、双目立体视觉传感器171、角度传感器172、支撑杆173、底座174、防护网175、控制箱180、进料头二190、法兰191、冲洗系统200、收集箱210、出水管220、水箱230、高压泵240、进水管250、定位装置300、内燃机组310、导柱320、传动轴321、转盘322、转杆323、抹平板324、拉杆325、轴承环326、支撑条327、顶板330、底板340、限位块341、压板342、支撑柱343、电机二350、支撑座360、螺纹柱370。
具体实施方式
38.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
39.参照附图1
‑
9,本发明提供的一种智能浇筑机,包括浇筑装置100、冲洗系统200与定位装置300,浇筑装置100底部固定安装有支撑台170,具体的,浇筑装置100两侧设有定位装置300,定位装置300包括内燃机组310,内燃机组310设有两组,两组内燃机组310分别安装在浇筑装置100两侧,内燃机组310与支撑台170顶部固定连接,支撑台170底部安装有传动轴321,传动轴321顶部与内燃机组310底部输出端固定连接,浇筑装置100内壁设有储料腔130,储料腔130底部设有输料腔140,储料腔130底部固定安装有进料阀131,输料腔140内壁固定安装有输料缸141,进料阀131底部与输料缸141顶部连接固定连接,输料缸141左侧固定安装有气缸142,气缸142右侧输出端固定安装有活塞143,活塞143插接在输料缸141内壁,浇筑装置100内壁左侧固定安装有管道144,管道144底部与输料缸141顶部固定连接,输
料缸141一侧固定安装有t形管150,输料缸141与t形管150连接处固定安装有出料阀一145,t形管150一端设置有出水口151,储料腔130具有储存混凝土的作用,输料腔140具有输送混凝土的作用,传动轴321外壁活动安装有导柱320,导柱320顶部与支撑台170底部固定连接,导柱320外壁固定安装有顶板330,顶板330底部固定安装有底板340,底板340顶部右侧固定安装有限位块341,限位块341设有两组,限位块341内壁活动安装有压板342,压板342右侧顶部固定安装有支撑柱343,支撑柱343顶部设有螺纹柱370,内燃机组310一侧固定安装有支撑座360,支撑座360一侧固定安装有电机二350,电机二底部输出端与螺纹柱固定连接,螺纹柱370外壁与支撑座360内壁活动连接,螺纹柱370底部与支撑柱343内壁螺纹连接;
40.具体的,支撑台170对浇筑装置100与内燃机组310具有支撑作用,内燃机组310以汽油作为燃料,将内能转化成动能的发动机,由于汽油粘性小,蒸发快,可以用汽油喷射系统将汽油喷入气缸,经过压缩达到一定的温度和压力后,用火花塞点燃,使气体膨胀做功,内燃机组310具有结构简单、质量轻、运转平稳等特点,内燃机组310对传动轴321具有传动作用,浇筑装置100具有储存与释放混凝土的作用,冲洗系统200具有冲洗浇筑装置100内残留混凝土的作用,定位装置300具有带动浇筑机移动至指定方位的作用,实现智能定位浇筑混凝土,输料腔140对输料缸141具有固定与安装作用,进料阀131对储料腔130与输料缸141具有连接作用,进料阀131具有将储料腔130内的混凝土输送至输料缸141的作用,气缸142是引导活塞在缸内进行直线往复运动的圆筒形金属机件,空气在发动机气缸中通过膨胀将热能转化为机械能,气体在压缩机气缸中接受活塞压缩而提高压力,使其产生直线往复运动的作用,气缸142对活塞143具有传动作用,输料缸141对活塞143具有安装与限位作用,活塞143具有推送混凝土的作用,浇筑装置100对管道144具有安装作用,管道144具有将水输送至输料缸141的作用,出料阀一145具有控制混凝土进入t形管150的流速与流量的作用,t形管150具有输送水与混凝土的作用,出水口151具有排出多余混凝土参杂的作用,导柱320对传动轴321具有保护作用,支撑台170对导柱320具有固定作用,导柱320对顶板330与底板340具有固定作用,底板340对限位块341具有固定作用,限位块341对压板342具有安装与限位作用,压板342对支撑柱343具有固定与支撑作用,内燃机组310对支撑座360具有固定作用,支撑座360对电机二350具有固定作用,电机二350对螺纹柱370具有传动作用,支撑座360对螺纹柱370具有限位作用,螺纹柱370底部与支撑柱343内壁螺纹连接,螺纹柱370旋转带动支撑柱343向下施压推动压板342向下移动,使抹平板324角度发生改变;
41.进一步地,冲洗系统200包括水箱230,水箱230固定安装在支撑台170顶部左侧,水箱230内壁固定安装有高压泵240,水箱230顶部固定安装有进水管250,高压泵240输出端与进水管250固定连接,进水管250一端与管道144顶部固定连接,支撑台170右侧顶部固定安装有收集箱210,收集箱210顶部固定安装有出水管220,出水管220一端与出水口151固定连接,支撑台170底部中心位置固定安装有出料阀二160,出料阀二160顶部与t形管150一端固定连接,具体的,支撑台170对水箱230具有固定作用,水箱230具有储存水的作用,水箱230对高压泵240具有安装作用,高压泵240是输送液体或使液体增压的机械,具有把液体增压到640mpa的压力的作用,高压泵240具有将水输送至进水管250的作用,进水管250具有输送水至管道144的作用,支撑台170对收集箱210具有支撑与固定作用,具体的,支撑台170对收集箱210具有固定与支撑作用,收集箱210具有收集t形管150与输料缸141内部残留混凝土的作用,出水管220具有将出水口151内混凝土输送至收集箱210的作用,具体的,支撑台170
对出料阀二160具有固定作用,出料阀二160具有释放t形管150内混凝土的作用,出料阀二160具有控制t形管150排出的混凝土流速与流量的作用;
42.进一步地,浇筑装置100顶部一侧固定安装有进料头一110,进料头一110底部与储料腔130内壁连接,浇筑装置100顶部中心位置固定安装有电机一122,电机一122右侧输出端固定安装有减速机120,储料腔130内壁设有搅拌杆121,搅拌杆121顶部与减速机120底部输出端固定连接,具体的,进料头一110具有补充混凝土的作用,浇筑装置100对电机一122与减速机120具有固定与支撑作用,电机一122与电机二350设置为伺服电机,电机一122对减速机120具有传动作用,减速机120对搅拌杆121具有传动作用,搅拌杆121具有防止储料腔130内部混凝土凝固的作用,减速机120是一种由封闭在刚性壳体内的齿轮传动、蜗杆传动、齿轮与蜗杆传动所组成的独立部件,具有在电机一122和搅拌杆121之间起到匹配转速和传递转矩的作用;
43.进一步地,支撑台170一侧固定安装有双目立体视觉传感器171,双目立体视觉传感器171顶部固定安装有角度传感器172,支撑台170底部两侧固定有支撑杆173,支撑杆173设有四组,支撑杆173底部固定安装有底座174,两组支撑杆173之间固定安装有防护网175,支撑台170顶部左侧固定安装有控制箱180,传动轴321底部固定安装有转盘322,转盘322外壁固定安装有转杆323,转杆323设有四组,转杆323底部固定安装有抹平板324,抹平板324安装角度呈35
°
,转杆323顶部固定安装有支撑条327,导柱320外壁底部固定安装有轴承环326,轴承环326外壁固定安装有拉杆325,拉杆325一端与支撑条327顶部固定连接,具体的,支撑台170对双目立体视觉传感器171具有支撑作用,双目立体视觉传感器171对角度传感器172具有固定作用,双目立体视觉传感器171融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,获取空间三维场景的距离信息,结合角度传感器172,将位置传感信息和深度数据相结合,推算出地面凹坑存在与否和凹坑距离信息,能够根据深度数组实现地面凹坑识别,支撑台170对支撑杆173具有固定作用,支撑杆173对底座174具有固定作用,支撑杆173对防护网175具有安装作用,防护网175具有保护与防撞作用,支撑台170对控制箱180具有支撑与安装作用,控制箱180对双目立体视觉传感器171与角度传感器172具有接收信息与发出信号的作用,传动轴321对转盘322具有支撑与传动作用,转盘322对转杆323具有固定作用,转杆323对抹平板324具有固定作用,转杆323对支撑条327具有固定作用,导柱320对轴承环326具有安装与固定作用,轴承环326具有旋转作用,轴承环326对拉杆325具有固定作用,支撑条327对拉杆325具有固定作用,拉杆325与支撑条327具有增加转杆323扭力的作用;
44.本发明的使用过程如下:在使用本发明时本领域工作人员需要将混凝土通过进料头一110注入储料腔130内,双目立体视觉传感器171与角度传感器172将位置传感信息和深度数据相结合,推算出地面凹坑存在与否和凹坑距离信息,能够根据深度数组实现地面凹坑识别,将数据传输至控制箱180,控制箱180控制启动内燃机组310,内燃机组310带动传动轴321旋转,传动轴321驱动转盘322旋转,转盘322驱动四个转杆323旋转,电机二350驱动螺纹柱370旋转,螺纹柱370带动压板342向下移动,调整倾斜角度使抹平板324一侧对地面表面的压力增大,相应摩擦力增大,当两组定位装置300带动的抹平板324摩擦力方向一致时,使浇筑机实现前后移动,当摩擦力不一致时,浇筑机旋转移动,到达指定方位后,控制箱180
控制气缸142推动活塞143往复运动,活塞143后移时吸料,进料阀131放料,气缸142前推时活塞143将输料缸141中的混凝土压入t形管150,出料阀二160开启,释放混凝土掉落至地面,输送混凝土结束后,出料阀二160关闭,通过水箱230用高压泵240输送水进行清洗输料缸141和t形管150,杂质与水通过t形管150与出水管220进入收集箱210内,完成后,电机二350驱动螺纹柱370旋转,螺纹柱370带动压板342向上移动,调整倾斜角度使抹平板324一侧对地面表面的压力相等,浇筑机通过抹平板324原地抹平与补洞操作。
45.实施例2:
46.一种智能浇筑机操作方法,其操作步骤为:
47.步骤一:将混凝土通过进料头一110注入储料腔130内;
48.步骤二:启动双目立体视觉传感器171与角度传感器172,将位置传感信息和深度数据相结合,推算出地面凹坑存在与否和凹坑距离信息,能够根据深度数组实现地面凹坑识别,将数据传输至控制箱180;
49.步骤三:启动内燃机组310,内燃机组310带动传动轴321旋转,传动轴321驱动转盘322旋转,转盘322驱动四个转杆323旋转,电机二350驱动螺纹柱370旋转,螺纹柱370带动压板342向下移动,使浇筑机前后与旋转移动;
50.步骤四:到达指定方位后,启动气缸142推动活塞143往复运动,活塞143后移时吸料,进料阀131放料,气缸142前推时活塞143将输料缸141中的混凝土压入t形管150,开启出料阀二160,释放混凝土掉落至地面;
51.步骤五:关闭出料阀二160,通过水箱230用高压泵240输送水进行清洗输料缸141和t形管150,杂质与水通过t形管150与出水管220进入收集箱210内,完成后;
52.步骤六:电机二350驱动螺纹柱370旋转,螺纹柱370带动压板342向上移动,调整倾斜角度使抹平板324一侧对地面表面的压力相等,浇筑机通过抹平板324原地抹平与补洞操作。
53.实施例3:
54.参照说明书附图10,该实施例的一种智能浇筑机,还包括进料头二190;
55.进一步地,所述浇筑装置100顶部一侧固定安装有进料头二190,所述进料头二190顶部固定安装有法兰191,具体的,浇筑装置100对进料头二190具有固定作用,进料头二190对法兰191具有固定与安装作用,法兰191具有连接外置混凝土管道的作用,通过连续的输入混凝土,远程遥控控制箱180,控制箱180控制浇筑装置100、冲洗系统200与定位装置300实现连续浇筑与抹平大面积场地。
56.实施场景具体为:在使用本发明时本领域工作人员需要将进料头一110替换为进料头二190。
57.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。