1.本技术涉及机械电子技术领域,尤其是涉及一种静电驱动装置和静电薄膜机器人。
背景技术:
2.近年随着各界对自动化需求的提升,全球掀起一股机器人发展的热潮,各色各样、功能繁多的机器人产品被研发出来。在机器人自动化的过程中,传统的机器人如“钢铁战士”般的形象不仅使得难以被人们接受,而且传统机器人还因为整体刚性大的原因,在使用时具有一定的危险性,因此研发人员需要通过复杂的算法来安全的操控传统机器人,这大大增加了机器人的研发成本。
3.在这样的背景下,柔性机器人的概念开始被提出,柔性机器人利用了新兴的柔性材料、创新的驱动方式,以获得更好的环境适应性、安全性以及人机交互的可能性。而静电薄膜机器人因其结构简单、操控简便等优势在柔性机器人领域表现出了更优异的性能,目前对静电薄膜机器人的研究尚处于起步阶段。
技术实现要素:
4.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种静电驱动装置,能够实现大行程的运动。
5.根据本技术第一方面实施例的一种静电驱动装置,包括:运动部定子、运动部动子、牵引部、约束壳、供能模块,所述运动部定子包括第一供电总线、第一绝缘层,所述运动部动子包括第二供电总线、第二绝缘层,所述牵引部连接所述运动部动子,所述牵引部为各向异性摩擦结构,所述运动部定子和所述运动部动子设置在所述约束壳中,所述约束壳与所述运动部定子固定连接,所述供能模块分别连接所述第一供电总线和所述第二供电总线,并向所述第一供电总线和所述第二供电总线提供交变电压,所述运动部定子与所述运动部动子在所述交变电压下产生相对移动,所述运动部动子用于带动所述牵引部移动。
6.根据本技术实施例的静电驱动装置,至少具有如下有益效果:通过供能模块对静电驱动装置持续提供交变电压,使机器人可以在牵引部的作用下持续移动,实现大行程的运动。
7.根据本技术的一些实施例,还包括:升压模块,所述升压模块连接所述供能模块,所述升压模块用于调整所述交变电压的大小。
8.根据本技术的一些实施例,所述运动部定子和所述运动部动子均设置为单层或多层板状结构,所述运动部定子和所述运动部动子相互交叉设置。
9.根据本技术的一些实施例,所述各向异性摩擦结构为各向具有异性摩擦的铁针脚或能够产生可控摩擦力的静电吸附极片。
10.根据本技术的一些实施例,还包括:润滑层,所述润滑层设置在所述运动部定子与所述运动部动子的接触面上。
11.根据本技术的一些实施例,所述润滑层包括微米级的玻璃微球。
12.根据本技术的一些实施例,所述第一供电总线设置在所述第一绝缘层中,所述第二供电总线设置在所述第二绝缘层中。
13.根据本技术的一些实施例,所述第一供电总线和所述第二供电总线均包括三组驱动线路,所述交变电压为三相交流电。
14.根据本技术的一些实施例,所述第一绝缘层和所述第二绝缘层的材料均为聚酰亚胺。
15.根据本技术第二方面实施例的一种静电薄膜机器人,包括上述第一方面实施例所述的一种静电驱动装置,所述静电薄膜机器人在所述运动部动子、所述运动部定子和所述牵引部的共同作用下移动。
16.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
17.下面结合附图和实施例对本技术做进一步的说明,其中:
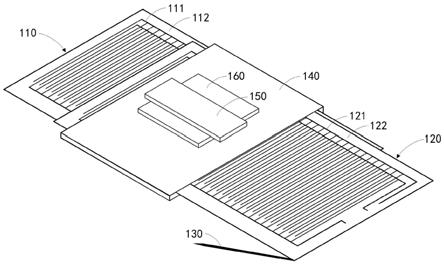
18.图1为本技术一实施例静电驱动装置的示意图;
19.图2为本技术一实施例静电驱动装置的侧视图;
20.图3为图2实施例静电驱动装置移动过程的示意图;
21.图4为本技术另一实施例运动部定子和运动部动子的示意图;
22.图5为本技术实施例静电驱动装置供电线路连接的示意图;
23.图6为本技术实施例静电驱动装置供电总线的示意图。
24.附图标记:
25.运动部定子110、运动部动子120、牵引部130、约束壳140;
26.供能模块150、升压模块160、第一供电总线111;
27.第一绝缘层112、第二供电总线121、第二绝缘层122。
具体实施方式
28.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
29.在本技术的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
30.在本技术的描述中,若干的含义是一个以上,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
31.本技术的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所
属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本技术中的具体含义。
32.一些实施例,参照图1和图2,本技术提出一种静电驱动装置,包括:运动部定子110、运动部动子120、牵引部130、约束壳140、供能模块150,运动部定子110包括第一供电总线111、第一绝缘层112,运动部动子120包括第二供电总线121、第二绝缘层122,牵引部130连接运动部动子120,牵引部130为各向异性摩擦结构,运动部定子110和运动部动子120设置在约束壳140中,约束壳140与运动部定子110固定连接,供能模块150分别连接第一供电总线111和第二供电总线121,并向第一供电总线111和第二供电总线121提供交变电压,运动部定子110与运动部动子120在交变电压下产生相对移动,运动部动子120用于带动牵引部130移动。
33.示意性实施例,图1中的运动部定子110和运动部动子120都设置为单层的板状结构,第一绝缘层112用于固定第一供电总线111,第二绝缘层122用于固定第二供电总线121,第一供电总线111和第二供电总线121都设置为沿直线方向均匀分布的多相交替分布结构,供能模块150分别连接(图中未示出)第一供电总线111和第二供电总线121,用于使得第一供电总线111和第二供电总线121的电极间产生静电场,由于第一供电总线111和第二供电总线121之间贴合且绝缘,当对应电极上的静电电荷极性相反时,即会产生相互吸引的静电力,在静电吸附力的作用下运动部定子110和运动部动子120之间即会产生相对移动。通过设计交变电压的频率、幅度等参数,即可改变极板间相对的移动速度。
34.通过约束壳140,约束极板间的相对移动为直线方向,且在运动部动子120上固定连接具有各向异性摩擦结构的牵引部130。具体示例,本技术实施例的各向异性摩擦结构为各向异性摩擦的铁针脚,图2中运动部定子110和运动部动子120上都设置有各向异性摩擦的铁针脚,其数量可以根据需要任意设置。可以理解的是,只在运动部定子110上设置各向异性摩擦结构也可以使静电驱动装置移动。在一些其他实施例中,各向异性摩擦结构也可以为勾状倒刺结构。
35.由于各向异性摩擦结构在不同移动方向上的摩擦力大小不同,因此在牵引部130的带动下,静电驱动装置即可沿一个方向持续移动,以实现大行程的运动。牵引部130的形状和结构可以根据设计需求任意选择。在一些其他实施例中,在约束壳140上也可以设置各向异性摩擦结构,以提高静电驱动装置与外界环境间的摩擦力;各向异性摩擦结构也可以为通过控制改变的可控型结构,以实现摩擦力大小和方向的可控制。
36.本技术实施例中供能模块150为微型集成的便携式装置,在一些其他实施例中,也可以为外部独立的大型设备。
37.本技术的静电驱动装置具有结构简单、体积小、发热量小、精度较高、便于驱动和控制的优点。
38.参照图3,为本技术实施例一种静电驱动装置移动过程的示意图。图中的静电驱动装置的运动部定子110和运动部动子120上都设置有各向异性摩擦的结构,其中a为初始运动状态。供能模块150向运动部定子110和运动部动子120输入交变电压,由于运动部定子110和运动部动子120上接入的交变电压之间存在相位差,使得第一供电总线111和第二供电总线121对应的电极上带有极性相反的电荷,从而产生静电力,在静电力的作用下使运动部定子110和运动部动子120相互远离运动,由于运动部动子120和运动部定子110上固定连
接有各向异性摩擦结构,运动部动子120更容易向右移动,从而形成图3中b的运动状态。然后通过改变交变电压的相位,使得运动部定子110和运动部动子120相互靠近运动,这时运动部动子由于牵引部的各向异性摩擦结构运动部动子不易向左移动,使运动部定子110带动整个静电驱动装置向右移动,形成图3中c的运动状态,如此往复切换驱动交变电压的相位,即可使静电驱动装置完成单方向的直线运动。
39.一些实施例,静电驱动装置还包括:升压模块160,升压模块160连接供能模块150,升压模块160用于调整交变电压的大小。运动部动子120和运动部定子110之间的静电力大小与交变电压的幅值大小有关,通过增加升压模块160提高交变电压的幅值,可以增大静电驱动装置的驱动力,从而增大静电驱动装置的负载能力。
40.一些实施例,运动部定子110和运动部动子120均设置为单层或多层板状结构,运动部定子110和运动部动子120相互交叉设置。参照图4,运动部定子110设置为四层的板状结构,运动部动子120设置为三层的板状结构,不同的极板相互交错设置,此种结构设计可以增大运动部定子110和运动部动子120之间静电力的大小。在一些其他实施例中,运动部定子110和运动部动子120可以设置为其它形状和结构。例如,运动部定子110设置为空心的圆柱状结构,运动部动子120也对应设置为半径较小的圆柱状结构,也可以使极板间产生相对移动。
41.一些实施例,各向异性摩擦结构为各向具有异性摩擦的铁针脚或能够产生可控摩擦力的静电吸附极片。通过设置可控的静电吸附极片,当需要摩擦力时,通过施加电压使极片产生静电吸附力,以使机器人与吸附面之间产生摩擦力,当不需要摩擦力时,去除施加的电压即可。通过设置可控的静电吸附极片也可以达到各向异性摩擦的效果,且此各向异性摩擦结构的摩擦力为可控制的,更加便于机器人移动。
42.一些实施例,本技术的静电驱动装置还包括:润滑层,润滑层设置在运动部定子110与运动部动子120的接触面上。通过设置润滑层,可以减小运动部动子120和运动部定子110之间的摩擦力。
43.一些实施例,润滑层包括微米级的玻璃微球。示例,润滑层可以仅设置为微米级别的均匀玻璃微球,或者仅设置为绝缘的润滑液等具有润滑作用的结构或材料。在一些其他实施例中,也可以通过在玻璃微球中添加润滑液以达到更好的润滑效果。
44.一些实施例,第一供电总线111设置在第一绝缘层112中,第二供电总线121设置在第二绝缘层122中。第一绝缘层112包裹第一供电总线111,第二绝缘层122包裹第二供电总线121,此种设置在隔离驱动电路的情况下,也可以保护驱动电路,防止驱动电路暴露在环境中,提高驱动电路的使用寿命。在一些其他实施例中,只具有两层驱动电路的情况下,也可以仅在驱动电路之间的接触面上设置绝缘层。
45.一些实施例,第一供电总线111和第二供电总线121均包括三组驱动线路,交变电压为三相交流电。参照图5,为供能模块150与驱动电路连接的示意图,可以通过蚀刻电路或者引线直连的方式进行连接,供能模块150向驱动电路输入三相交变电压,通过改变不同驱动线路中交变电压的相位,使种静电驱动装置产生移动。参照图6,为一实施例中三组驱动线路的布局图,图中的虚线仅为区别不同驱动线路,通过多相交替的分布结构,即可驱动静电驱动装置移动。在一些其他实施例中,也可以通过接入二相、四相等多相交流电的方式驱动静电驱动装置。
46.一些实施例,第一绝缘层112和第二绝缘层122的材料均为聚酰亚胺。聚酰亚胺为有机高分子材料,通过此种材料的设计,可以使运动部定子110和运动部动子120以柔性的方式移动,以适于复杂环境条件下的使用。在一些其他实施例中,也可以使用硬质的绝缘材料作为绝缘层,以提高静电驱动装置的结构强度。
47.一些实施例,本技术还提出一种静电薄膜机器人,包括上述实施例中的静电驱动装置,静电薄膜机器人在运动部动子120、运动部定子110和牵引部130的共同作用下移动。本技术的静电薄膜机器人使用静电驱动装置作为动力源,通过在静电驱动装置上附加其他功能模块,以达到具有不同功能静电薄膜机器人的效果。示例,可以在静电驱动装置上设置微型机械臂、切割刀、摄像头等,使静电薄膜机器人可以完成多种任务。
48.本技术的描述中,参考术语“一些实施例”、“示意性实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
49.上面结合附图对本技术实施例作了详细说明,但是本技术不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本技术宗旨的前提下做出各种变化。此外,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。