1.本实用新型涉及海产品捕捉领域,特别是一种蛏子采捕机械手。
背景技术:
2.蛏子,学名缢蛏,属软体动物,是双壳纲帘蛤目贝类动物,生活在海洋之中,为常见的海鲜食材。其贝壳脆而薄呈长扁方型,生活在泥沙之中。传统的采捕蛏子的方法比较原始,较为常见的方法有三种。第一种是用手扒开退潮后的沙滩,这种方法虽然比较方便但是费力费时;第二种是用铁丝插入洞中钓蛏子,但是这种方法成功率很低,采捕效率低下;第三种是在洞孔撒入细盐,蛏子会自动露出洞口,然后用手将蛏子拽出,这种方法虽然方便,但是蛏子会扒住洞穴内壁,同时蛏子的外表存在黏液,人手把持的时候容易打滑,因此如果没有经验的话很难将其从洞穴中拽出。因此现在需要一种能够解决上述问题的方法或装置。
技术实现要素:
3.本实用新型是为了解决现有技术所存在的上述不足,提出一种结构简单,设计巧妙,布局合理,能够方便、快速、可靠地对蛏子进行采捕的机械手。
4.本实用新型的技术解决方案是:一种蛏子采捕机械手,其特征在于:所述的机械手包括缸筒1,所述缸筒1的一端连接有把手组件2,所述把手组件2内铰接有第一把手3和第二把手4,所述缸筒1内设置有存储筒5,所述存储筒5远离把手组件2的一端铰接有翻板6,并且翻板6的铰接轴上还设置有扭簧,所述第二把手4位于把手组件1内部的一端连接有第二拉线7,所述第二拉线7与翻板6相连,所述第一把手3上连接有第一拉线8,所述第一拉线8的另一端与滑动连接在缸筒1内部的活塞体9的一端相连,而活塞体9的另一端则穿过支撑板10上的过孔后,与机械手指11通过转轴相铰接,所述活塞体9上还套接有弹簧13,且所述弹簧13位于缸筒1和设置在活塞体9上的限位环之间,在所述支撑板10上设置有三个在圆周方向上均匀分布的安装座12,所述机械手指11的底边通过转轴转动连接在安装座12上,
5.所述存储筒5与活塞体9同轴,所述活塞体9为两端通透的筒状。
6.本实用新型同现有技术相比,具有如下优点:
7.本种结构形式蛏子采捕机械手,其结构简单,设计巧妙,布局合理,它针对传统的蛏子采捕方式所存在的问题,设计出一种特殊的机械手结构。它内部设置有存储筒,使用者可以将食盐至于存储筒内,并通过对于第二把手的操作将其洒在目标地点,待蛏子在盐的吸引下从洞穴中探出时,使用者又可以通过对于第一把手的操作,驱动三个机械手指做抓取的动作,从而将蛏子从洞穴中拉拽出来,从而实现对蛏子的高效、快捷的采捕。并且这种机械手的制作工艺简单,制造成本低廉,因此可以说它具备了多种优点,特别适合于在本领域中推广应用,其市场前景十分广阔。
附图说明
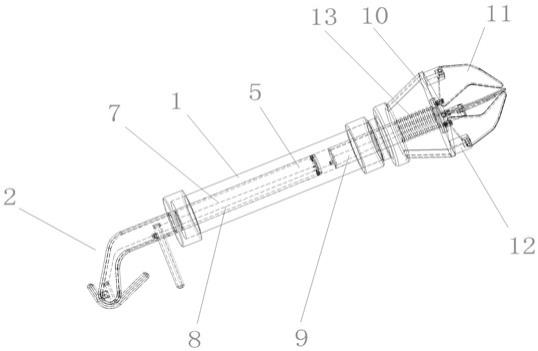
8.图1是本实用新型实施例的整体结构示意图。
9.图2是本实用新型实施例中存储筒部分的结构示意图。
10.图3是本实用新型实施例中把手组件部分的结构示意图。
具体实施方式
11.下面将结合附图说明本实用新型的具体实施方式。如图1、图2、图3所示:一种蛏子采捕机械手,它包括一个作为基础的缸筒1,在缸筒1的一端连接有把手组件2,所述把手组件2内铰接有第一把手3和第二把手4,所述缸筒1内设置有存储筒5,所述存储筒5远离把手组件2的一端铰接有翻板6,并且翻板6的铰接轴上还设置有扭簧,所述第二把手4位于把手组件1内部的一端连接有第二拉线7,所述第二拉线7与翻板6相连,所述第一把手3上连接有第一拉线8,所述第一拉线8的另一端与滑动连接在缸筒1内部的活塞体9的一端相连,而活塞体9的另一端则穿过支撑板10上的过孔后,与机械手指11通过转轴相铰接,所述活塞体9上还套接有弹簧13,且所述弹簧13位于缸筒1和设置在活塞体9上的限位环之间,在所述支撑板10上设置有三个在圆周方向上均匀分布的安装座12,所述机械手指11的底边通过转轴转动连接在安装座12上,所述存储筒5与活塞体9同轴,所述活塞体9为两端通透的筒状。
12.本实用新型实施例的蛏子采捕机械手的工作过程如下:首先在存储筒5内装满食盐,然后将存储筒5安装到缸筒1中,旋紧连接件13,将把手组件2也连接在存储筒5的尾端,准备工作完成;
13.使用者将机械手指11的一端朝下拿持,让本机械手位于目标区域处,首先扳动第二把手4,第二把手4摆动是,会向后方拉动第二拉线7,翻板6在第二拉线7的带动下打开,在自重的作用下,存储筒5内的食盐会通过翻板6处的开口下落,并穿过两端通透的活塞体9后,落在目标区域;松开第二把手4后,在扭簧的作用下,翻板6重新将存储筒5的端部开口封闭,第二拉线7则带动第二把手4回复到初始位置;
14.泥沙中的蛏子察觉到食盐后,会自动从泥沙中钻出,其端部会露出地面一定距离;此时使用者将机械手指11至于蛏子处,并扳动第一把手3,第一把手3转动时,同样向后方拉动第一拉线8,第一拉线8带动活塞体9在缸筒1内部向后方运动,在此过程中由于限位环的存在,弹簧13在限位环和缸筒1的端面之间被压缩,而铰接在活塞体9端部的三个机械手指11则进行摆动,这样机械手指11的自由端相向运动,从三个不同的方向上夹紧蛏子,操作者只需要在该状态下向上拉拽机械手,便可以将蛏子从泥沙中拽出,实现蛏子的采捕;
15.操作结束后,松开第一把手3,在弹簧13的作用下,活塞体9重新向前方运动,第一拉线8带动第一把手3回复到初始位置,而三个机械手指11张开,将采捕上来的蛏子松开;使用者即可进行下一次采捕操作。
技术特征:
1.一种蛏子采捕机械手,其特征在于:所述的机械手包括缸筒(1),所述缸筒(1)的一端连接有把手组件(2),所述把手组件(2)内铰接有第一把手(3)和第二把手(4),所述缸筒(1)内设置有存储筒(5),所述存储筒(5)远离把手组件(2)的一端铰接有翻板(6),并且翻板(6)的铰接轴上还设置有扭簧,所述第二把手(4)位于把手组件(2)内部的一端连接有第二拉线(7),所述第二拉线(7)与翻板(6)相连,所述第一把手(3)上连接有第一拉线(8),所述第一拉线(8)的另一端与滑动连接在缸筒(1)内部的活塞体(9)的一端相连,而活塞体(9)的另一端则穿过支撑板(10)上的过孔后,与机械手指(11)通过转轴相铰接,所述活塞体(9)上还套接有弹簧(13),且所述弹簧(13)位于缸筒(1)和设置在活塞体(9)上的限位环之间,在所述支撑板(10)上设置有三个在圆周方向上均匀分布的安装座(12),所述机械手指(11)的底边通过转轴转动连接在安装座(12)上,所述存储筒(5)与活塞体(9)同轴,所述活塞体(9)为两端通透的筒状。
技术总结
本实用新型公开了一种蛏子采捕机械手,它包括缸筒(1),所述缸筒(1)的一端连接有把手组件(2),所述把手组件(2)内铰接有第一把手(3)和第二把手(4),所述缸筒(1)内设置有存储筒(5),所述存储筒(5)远离把手组件(2)的一端铰接有翻板(6),并且翻板(6)的铰接轴上还设置有扭簧,所述第二把手(4)位于把手组件(1)内部的一端连接有第二拉线(7),所述第二拉线(7)与翻板(6)相连,所述第一把手(3)上连接有第一拉线(8),所述第一拉线(8)的另一端与滑动连接在缸筒(1)内部的活塞体(9)的一端相连,而活塞体(9)的另一端则穿过支撑板(10)上的过孔后,与机械手指(11)通过转轴相铰接。机械手指(11)通过转轴相铰接。机械手指(11)通过转轴相铰接。
技术研发人员:宋研研 高国栋 许真 于涛
受保护的技术使用者:大连海洋大学
技术研发日:2020.12.24
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

