1.本发明属于管廊巡检机器人领域,具体涉及一种适应管廊复杂环境的挂轨式巡检机器人走行轨道。
背景技术:
2.综合管廊是指可以容纳电力、通信、供水、燃气等多种市政管线的地下隧道。为了确保城市“生命线”的安全,需要对综合管廊进行大量巡检。由于环境中存在有毒、窒息、爆炸、触电等安全风险,尤其是发生短时强降雨导致管线水淹、地震等瞬发自然灾害情况,人工巡检极易发生重大安全事故;而且机器人可以工作在恶劣的环境中,并且能够提供客观的检查,因此,目前使用机器人技术对综合管廊进行巡检,以降低人员劳动强度和安全风险,提升巡检质量。
3.由于管廊内容纳电力、通信、供水、燃气等多种市政管线,管廊地面存在积水,掉落的元器件和灰尘垃圾,因此管廊巡检机器人一般采用挂轨式巡检机器人,机器人运行在管廊顶部,沿着轨道进行管廊的综合检测。
4.虽然挂轨式巡检机器人沿着管廊顶部运行,避开了管廊地面的积水等各种障碍,但是管廊顶部设置有检修孔、进料口/卸料口等位置,会对挂轨式巡检机器人的走形轨发生干涉,需要设计一种适应管廊复杂环境的挂轨式巡检机器人走行轨道。
技术实现要素:
5.针对现有技术以上缺陷或改进需求中的至少一种,本发明提供了一种适应管廊复杂环境的挂轨式巡检机器人走行轨道,在管廊顶部开口及其盖板的下方将固定段轨道断开,设置翻转轨道安装在管廊的侧壁,盖板关闭的常态下,中间的翻转轨道翻转至衔接状态,管廊挂轨式巡检机器人可以沿翻转轨道正常通行巡检,进一步设置多道保险确保走向安全性;当盖板打开、上方需要有物体通过时,中间的翻转轨道翻转到中断收拢状态,提供管廊顶部开口下方的作业空间,避免了走形轨道与其他物体的干涉。
6.为实现上述目的,按照本发明的一个方面,提供了一种适应管廊复杂环境的挂轨式巡检机器人走行轨道,其特征在于:包括固定段轨道和翻转轨道;
7.所述翻转轨道位于管廊顶部开口及其盖板的下方,所述翻转轨道安装在管廊的侧壁;
8.所述固定段轨道在管廊顶部开口范围内断开,中间的所述翻转轨道翻转至衔接状态时,允许管廊挂轨式巡检机器人沿翻转轨道正常通过,翻转到中断收拢状态时,提供管廊顶部开口下方的作业空间。
9.进一步优选地,所述挂轨式巡检机器人走行轨道还包括翻转梁、翻转梁固定件;
10.所述翻转梁固定件固定在管廊的侧壁,所述翻转梁的一端铰接于所述翻转梁固定件、另一端安装所述翻转轨道。
11.进一步优选地,所述挂轨式巡检机器人走行轨道还包括定位锁;
12.所述定位锁设置在所述翻转梁与翻转梁固定件之间,将所述翻转轨道翻转到位后锁定在衔接状态。
13.进一步优选地,所述挂轨式巡检机器人走行轨道还包括电动旋转装置;
14.所述电动旋转装置一端连接所述翻转梁、另一端连接所述翻转梁固定件,是所述翻转轨道的翻转和收拢的致动部件。
15.进一步优选地,所述挂轨式巡检机器人走行轨道还包括电磁锁定装置;
16.所述电磁锁定装置的一部分固定于所述固定段轨道,另一部分朝向所述翻转轨道悬置,在所述翻转轨道翻转到位的衔接状态下,处于通电状态电磁吸附固定衔接接头。
17.进一步优选地,所述挂轨式巡检机器人走行轨道还包括限位装置;
18.所述限位装置安装在两段所述固定段轨道的断开端部,其具有开启状态和关闭状态;
19.在开启状态下,所述限位装置侵入管廊挂轨式巡检机器人的限界,阻挡管廊挂轨式巡检机器人向断开处继续运动;
20.在关闭状态下,所述限位装置不侵入管廊挂轨式巡检机器人的限界,允许管廊挂轨式巡检机器人向所述翻转轨道继续运动。
21.进一步优选地,所述限位装置具有固定部和移动部;
22.所述固定部的一端被固定,另一端与所述移动部铰接;
23.所述固定部始终不侵入管廊挂轨式机器人的限界,所述移动部在侵入和不侵入管廊挂轨式机器人的限界之间转换。
24.进一步优选地,所述限位装置还具有缓冲部;
25.所述缓冲部设置在所述固定部与移动部之间,形成两者之间的张力,该张力具有将所述移动部转到侵入管廊挂轨式机器人的限界的趋势,并作为阻挡管廊挂轨式机器人继续向断开处运动的限位阻力。
26.进一步优选地,所述管廊顶部开口为管廊检修孔。
27.进一步优选地,所述管廊顶部开口为管廊进料口或卸料口。
28.上述优选技术特征只要彼此之间未构成冲突就可以相互组合。
29.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
30.1、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,在管廊顶部开口及其盖板的下方将固定段轨道断开,设置翻转轨道安装在管廊的侧壁,盖板关闭的常态下,中间的翻转轨道翻转至衔接状态,管廊挂轨式巡检机器人可以沿翻转轨道正常通行巡检,进一步设置多道保险确保走向安全性;当盖板打开、上方需要有物体通过时,中间的翻转轨道翻转到中断收拢状态,提供管廊顶部开口下方的作业空间,避免了走形轨道与其他物体的干涉。
31.2、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,采用电动旋转装置致动翻转轨道的翻转和收拢动作,并且采用定位锁实现衔接的定位与物理锁定,无需电动旋转装置一直通电支撑保持衔接状态,避免电动旋转装置的故障或断电导致走行轨道出现衔接问题、昂贵的管廊挂轨式巡检机器人发生碰撞或掉落。
32.3、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,在走行轨道的衔接
接头处,采用电磁锁定装置,在翻转轨道翻转到位的衔接状态下,通电产生电磁吸附固定衔接接头,进一步保障了接头处的通过安全性。
33.4、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,在固定轨道的断开端部提前设置限位装置,具有开启状态和关闭状态;在开启状态下,限位装置侵入管廊挂轨式巡检机器人的限界,阻挡管廊挂轨式巡检机器人向断开处继续运动;在关闭状态下,限位装置不侵入管廊挂轨式巡检机器人的限界,允许管廊挂轨式巡检机器人向翻转轨道继续运动,防止在翻转轨道衔接不到位、巡检机器人接收指令失效等情况下,管廊挂轨式巡检机器人发生碰撞或掉落,进一步保障了接头处的通过安全性。
附图说明
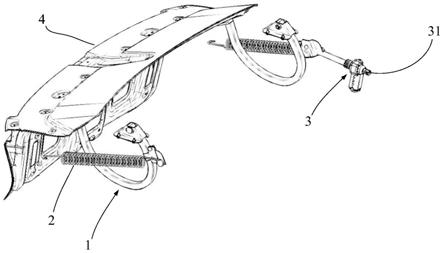
34.图1是本发明实施例的适应管廊复杂环境的挂轨式巡检机器人走行轨道在衔接状态下的正视示意图;
35.图2是本发明实施例的适应管廊复杂环境的挂轨式巡检机器人走行轨道在衔接状态下的侧视示意图;
36.图3是本发明实施例的适应管廊复杂环境的挂轨式巡检机器人走行轨道在断开收拢状态下的正视示意图;
37.图4是本发明实施例的适应管廊复杂环境的挂轨式巡检机器人走行轨道的电磁锁定装置的原理示意图;
38.图5是本发明实施例的适应管廊复杂环境的挂轨式巡检机器人走行轨道的限位装置开启状态下的示意图;
39.图6是本发明实施例的适应管廊复杂环境的挂轨式巡检机器人走行轨道的限位装置关闭状态下的示意图。
具体实施方式
40.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面结合具体实施方式对本发明进一步详细说明。
41.作为本发明的一种较佳实施方式,如图1
‑
6所示,本发明提供一种适应管廊复杂环境的挂轨式巡检机器人走行轨道,包括两侧的固定段轨道20和中间的翻转轨道2。
42.如图2所示,所述翻转轨道2位于管廊顶部开口21及其盖板22的下方,所述管廊顶部开口21为管廊检修孔,或管廊进料口或卸料口;所述翻转轨道2安装在管廊的侧壁。
43.如图2所示,所述固定段轨道20安装在管廊的顶部在管廊顶部开口21范围内断开,中间的所述翻转轨道2翻转至衔接状态时,允许管廊挂轨式巡检机器人沿翻转轨道2正常通过,翻转到中断收拢状态时,提供管廊顶部开口21下方的作业空间。
44.进一步优选地,所述挂轨式巡检机器人走行轨道还包括翻转梁1、翻转梁固定件3;所述翻转梁固定件3固定在管廊的侧壁,所述翻转梁1的一端通过固定销轴旋转轴5铰接于所述翻转梁固定件3、另一端通过翻转轨道固定件4安装例如工字形或倒t形的所述翻转轨道2。
45.如图1、3所示,进一步优选地,所述挂轨式巡检机器人走行轨道还包括定位锁6;所述定位锁6设置在所述翻转梁1与翻转梁固定件3之间,将所述翻转轨道2翻转到位后锁定在衔接状态。
46.如图1、3所示,进一步优选地,所述挂轨式巡检机器人走行轨道还包括电动旋转装置7;所述电动旋转装置7一端连接所述翻转梁1、另一端连接所述翻转梁固定件3,是所述翻转轨道2的翻转和收拢的致动部件。
47.如图2、4所示,进一步优选地,所述挂轨式巡检机器人走行轨道还包括电磁锁定装置8;所述电磁锁定装置8的一部分固定于所述固定段轨道20,另一部分朝向所述翻转轨道2悬置,在所述翻转轨道2翻转到位的衔接状态下,处于通电状态电磁吸附固定衔接接头。
48.如图2所示,进一步优选地,所述挂轨式巡检机器人走行轨道还包括限位装置9;所述限位装置9安装在两段所述固定段轨道20的断开端部,其具有开启状态和关闭状态;
49.在开启状态下,所述限位装置9侵入管廊挂轨式巡检机器人的限界,阻挡管廊挂轨式巡检机器人向断开处继续运动;
50.在关闭状态下,所述限位装置9不侵入管廊挂轨式巡检机器人的限界,允许管廊挂轨式巡检机器人向所述翻转轨道2继续运动。
51.如图5
‑
6所示,进一步优选地,所述限位装置9具有固定部91和移动部92;
52.所述固定部91的一端被固定,另一端与所述移动部92铰接;
53.所述固定部91始终不侵入管廊挂轨式机器人的限界,所述移动部92在侵入和不侵入管廊挂轨式机器人的限界之间转换。
54.进一步优选地,所述限位装置9还具有缓冲部93;
55.所述缓冲部93设置在所述固定部91与移动部92之间,形成两者之间的张力,该张力具有将所述移动部92转到侵入管廊挂轨式机器人的限界的趋势,并作为阻挡管廊挂轨式机器人继续向断开处运动的限位阻力。
56.如前所述的适应管廊复杂环境的挂轨式巡检机器人走行轨道的走行方法或使用方法,包括如下步骤:
57.s1、探测管廊顶部开口21的盖板22是否开启;
58.s2、若盖板22开启,则自动控制或通过设置在盖板22外的按钮开启限位装置9、解除定位锁6和电磁锁定装置8的锁定;优选地,此后,管廊挂轨式机器人被限位装置9阻挡,或接到走行轨道或总控的指令停止通行;
59.s3、启动电动旋转装置7,致动翻转梁1带动中间的翻转轨道2向翻转梁固定件3翻转回收;优选地,此后电动旋转装置7断电后自锁;
60.s4、待管廊顶部开口21处的作业完成并关闭盖板22后,自动控制或通过设置在盖板22外的按钮启动电动旋转装置7,致动翻转梁1带动中间的翻转轨道2向固定段轨道20翻转对接;
61.s5、锁定定位锁6和电磁锁定装置8;优选地,此后电动旋转装置7断电后自锁;
62.s6、关闭限位装置9;优选地,此后,管廊挂轨式机器人可以自主通行,或接到走行轨道或总控的指令通行。
63.综上所述,与现有技术相比,本发明的方案具有如下显著优势:
64.1、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,在管廊顶部开口及
其盖板的下方将固定段轨道断开,设置翻转轨道安装在管廊的侧壁,盖板关闭的常态下,中间的翻转轨道翻转至衔接状态,管廊挂轨式巡检机器人可以沿翻转轨道正常通行巡检,进一步设置多道保险确保走向安全性;当盖板打开、上方需要有物体通过时,中间的翻转轨道翻转到中断收拢状态,提供管廊顶部开口下方的作业空间,避免了走形轨道与其他物体的干涉。
65.2、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,采用电动旋转装置致动翻转轨道的翻转和收拢动作,并且采用定位锁实现衔接的定位与物理锁定,无需电动旋转装置一直通电支撑保持衔接状态,避免电动旋转装置的故障或断电导致走行轨道出现衔接问题、昂贵的管廊挂轨式巡检机器人发生碰撞或掉落。
66.3、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,在走行轨道的衔接接头处,采用电磁锁定装置,在翻转轨道翻转到位的衔接状态下,通电产生电磁吸附固定衔接接头,进一步保障了接头处的通过安全性。
67.4、本发明的适应管廊复杂环境的挂轨式巡检机器人走行轨道,在固定轨道的断开端部提前设置限位装置,具有开启状态和关闭状态;在开启状态下,限位装置侵入管廊挂轨式巡检机器人的限界,阻挡管廊挂轨式巡检机器人向断开处继续运动;在关闭状态下,限位装置不侵入管廊挂轨式巡检机器人的限界,允许管廊挂轨式巡检机器人向翻转轨道继续运动,防止在翻转轨道衔接不到位、巡检机器人接收指令失效等情况下,管廊挂轨式巡检机器人发生碰撞或掉落,进一步保障了接头处的通过安全性。
68.可以理解的是,以上所描述的系统的实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,既可以位于一个地方,或者也可以分布到不同网络单元上。可以根据实际需要选择其中的部分或全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
69.另外,本领域内的技术人员应当理解的是,在本发明实施例的申请文件中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
70.本发明实施例的说明书中,说明了大量具体细节。然而应当理解的是,本发明实施例的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。类似地,应当理解,为了精简本发明实施例公开并帮助理解各个发明方面中的一个或多个,在上面对本发明实施例的示例性实施例的描述中,本发明实施例的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。
71.然而,并不应将该公开的方法解释成反映如下意图:即所要求保护的本发明实施例要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如权利要求书所反映的那样,发明方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明实施例的单独实施例。
72.最后应说明的是:以上实施例仅用以说明本发明实施例的技术方案,而非对其限制;尽管参照前述实施例对本发明实施例进行了详细的说明,本领域的技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。