1.本发明涉及无人机应用领域,特别是一种基于无人机的森林防火灭火方法及其无人机。
背景技术:
2.随着无人机的不断发展,无人机的运用领域越发的广泛,其中作为灾前预防和灾后救援工具都具有重要意义,无人机不仅动作迅速,而且保证了救援工作的安全,能为合理分配救援力量、确定救灾重点区域、选择安全救援路线以及灾后重建提供有价值的参考,但是还缺乏系统的管理方法。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种基于无人机的森林防火灭火方法及其无人机,
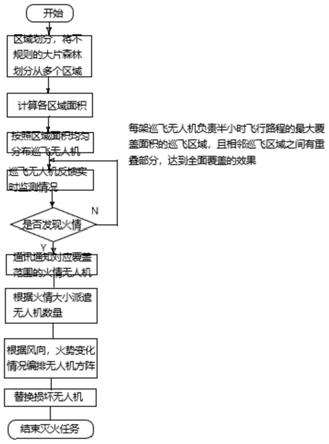
4.技术方案:为实现上述目的,本发明的一种基于无人机的森林防火灭火方法及其无人机,任务区域覆盖规划包括以下步骤:
5.第一步骤,派遣巡飞无人机绕森林边界飞行一周,记录飞行轨迹和飞行行程;
6.第二步骤,通过巡飞无人机飞行轨迹自动生成森林轮廓图,通过飞行行程计算森林面积;
7.第三步骤,通过将生成的森林轮廓图放置于网格坐标中,自动将森林分为面积相近的若干区域,相邻所述区域之间存在重叠的部分。
8.进一步地,各个所述区域内派遣巡飞无人机巡查火情,且各个区域内对应配备无人机派遣点和火情无人机编队,区域火情巡查包括以下步骤:
9.第一步骤,巡飞无人机按区域形状规划飞行轨迹,并按所述轨迹进行循环往复飞行巡查;
10.第二步骤,巡飞无人机通过摄像机环绕监视以机身为圆心的圆形范围内的火情,若发现火情,则进行下一步骤,否则待低电量提醒后启动返航程序;
11.第三步骤,巡飞无人机通过gps系统确定火情位置并记录位置信息,通过摄像机记录火势大小,并记录火势范围信息;
12.第四步骤,巡飞无人机通过通讯将所述火情位置信息和火势范围信息发往对应区域无人机派遣点,并通知派遣火情无人机编队;
13.第五步骤,巡飞无人机在火情点周围盘旋,并向对应区域无人机派遣点发送实时火情信息。
14.进一步地,所述无人机派遣点派遣火情无人机编队进行防火灭火,包括以下步骤:
15.第一步骤,接收所述火情位置信息和火势范围信息;
16.第二步骤,根据所述火情位置信息和火势范围信息派遣火情无人机的种类和数量,组成火情无人机编队;
17.第三步骤,所述火情无人机编队飞至火情点,通过摄像机记录火势,并通过主机对火情无人机编队进行组合式方阵编排;
18.第四步骤,以组合式方阵进行防火灭火;
19.第五步骤,通过摄像机实时记录火势,主机根据火势变化改变方阵编排;
20.所述火情无人机环绕所述火情点形成包围式方阵,所述火情无人机包括喷水无人机和干粉无人机,所述喷水无人机和所述干粉无人机间隔排列设置,相邻所述喷水无人机和所述干粉无人机的喷射范围交叉重叠;所述包围式方阵根据火势衰减情况向中心聚拢;
21.如果火势有向一侧蔓延趋势,所述火势蔓延反方向一侧的火情无人机迅速从火情点两侧飞至火势蔓延一侧,并穿插进火势蔓延一侧的火情无人机的方阵中,重新排列形成长条式方阵;如果火势有火焰尖端从空中向外席卷蔓延的趋势,部分所述喷水无人机上升至一定高度排列成围合式方阵,并以倾斜角度朝向火焰尖端喷射水雾,下方所述火情无人机重新调整间距并维持包围式方阵,且以倾斜角度朝向火焰根部同时喷射水雾和干粉,整体形成上下双层包围式方阵。
22.进一步地,到较大险情,火情无人机派遣包括以下步骤:
23.第一步骤,接收所述火情位置信息和火势范围信息,确定为较大险情;
24.第二步骤,派遣该区域所有火情无人机,同时通过通讯通知其他区域无人机派遣点派遣火情无人机增援;
25.第三步骤,不同区域的火情无人机之间通过通讯系统相互联系,根据火势重新调整方阵的编排;
26.各区域火情无人机单独形成小队,以长条式方阵沿火势边界线设置,不同区域的火情无人机小队位于不同方向的火势边界线上,整体形成包围式方阵;或不同区域的火情无人机小队分布于竖直方向上的不同高度处,最低端的火情无人机小队围绕火势边界线成围合式方阵,其他区域的火情无人机小队向上依次向火情中心点聚拢成围合式方阵,整体形成立体空间上的锥形围合式方阵,且最顶端的一组火情无人机小队采用投掷水弹的方法。
27.进一步地,所述火情无人机编队中的无人机都配备有对应的替补无人机,所述替补无人机通过编写与所述火情无人机编队中对应无人机相同的算法程序,当所述火情无人机编队中有无人机损坏时,所述替补无人机立刻启动相应算法程序,填补空位。
28.进一步地,包括无人机本体,所述无人机本体的机腹设置有摄像机、环境检测传感器装置和伸缩式喷水管,所述无人机本体的机顶设置有电动水箱和风机;
29.所述摄像机外部罩设有透明罩,与所述风机对接的导风管穿过电动水箱连通所述透明罩。
30.进一步地,所述导风管及水管均设置于无人机本体的内部。
31.进一步地,所述伸缩式喷水管由至少两节管道依次轴向套接构成,位于最上端的管道通过金属软管对接所述水管,位于最上端的管道上还设置有通过连接杆连接无人机本体的机腹的上连板,位于最下端的管道上设置有下连板,所述上连板与下连板之间连接有电动推杆,所述电动推杆通过无人机本体的飞行控制系统控制。
32.进一步地,所述无人机本体的机顶设置有隔热罩,所述电动水箱及所述风机均位于隔热罩内,所述隔热罩的顶部密布进风孔;
33.所述摄像机为与无人机本体的飞行控制系统数据传输连接的热成像摄像机。
34.进一步地,所述环境检测传感器装置包括温度传感器、烟雾传感器和空气湿度传感器,所述温度传感器、所述烟雾传感器和所述空气湿度传感器分别与无人机本体的飞行控制系统信号传输连接,所述无人机本体还具有gps定位装置,无人机本体的飞行控制系统及gps定位装置均连接地面控制中心;
35.所述无人机本体、电动推杆、温度传感器、烟雾传感器及空气湿度传感器的表面均涂覆有热反射涂层,提高抗热能力。
36.有益效果:本发明的一种基于无人机的森林防火灭火方法及其无人机,采用系统的区域化分工排查,各区域既独立又相互联系,能够更好更快的应付突发火情,避免火势的蔓延,通过变化不同方阵来应对不同的火势变化和火情大小,且采用的无人机抗高温能力强,提高其从空中侦查火灾区的能力。
附图说明
37.附图1为一种基于无人机的森林防火灭火方法框图;
38.附图2为火势一侧蔓延趋势无人机方阵变化图;
39.附图3为火焰尖端从空中向外席卷蔓延趋势的无人机方阵布局图;
40.附图4为多区域小队组合式方阵布局图;
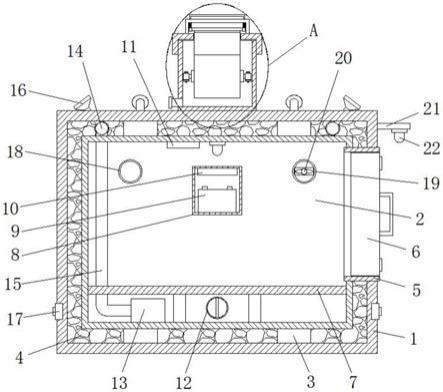
41.附图5为一种基于无人机的森林防火灭火方法的无人机结构图;
42.附图6为喷水装置的结构示意图。
具体实施方式
43.下面结合附图对本发明作更进一步的说明。
44.如附图1
‑
6所述的一种基于无人机的森林防火灭火方法及其无人机
45.任务区域覆盖规划包括以下步骤:
46.第一步骤,派遣巡飞无人机绕森林边界飞行一周,记录飞行轨迹和飞行行程;
47.第二步骤,通过巡飞无人机飞行轨迹自动生成森林轮廓图,通过飞行行程计算森林面积;
48.第三步骤,通过将生成的森林轮廓图放置于网格坐标中,自动将森林分为面积相近的若干区域,相邻所述区域之间存在重叠的部分。
49.各个所述区域内派遣巡飞无人机巡查火情,且各个区域内对应配备无人机派遣点和火情无人机编队,区域火情巡查包括以下步骤:
50.第一步骤,巡飞无人机按区域形状规划飞行轨迹,并按所述轨迹进行循环往复飞行巡查;
51.第二步骤,巡飞无人机通过摄像机环绕监视以机身为圆心的圆形范围内的火情,若发现火情,则进行下一步骤,否则待低电量提醒后启动返航程序;
52.第三步骤,巡飞无人机通过gps系统确定火情位置并记录位置信息,通过摄像机记录火势大小,并记录火势范围信息;
53.第四步骤,巡飞无人机通过通讯将所述火情位置信息和火势范围信息发往对应区域无人机派遣点,并通知派遣火情无人机编队;
54.第五步骤,巡飞无人机在火情点周围盘旋,并向对应区域无人机派遣点发送实时火情信息。
55.所述无人机派遣点派遣火情无人机编队进行防火灭火,包括以下步骤:
56.第一步骤,接收所述火情位置信息和火势范围信息;
57.第二步骤,根据所述火情位置信息和火势范围信息派遣火情无人机的种类和数量,组成火情无人机编队;
58.第三步骤,所述火情无人机编队飞至火情点,通过摄像机记录火势,并通过主机对火情无人机编队进行组合式方阵编排;
59.第四步骤,以组合式方阵进行防火灭火;
60.第五步骤,通过摄像机实时记录火势,主机根据火势变化改变方阵编排;
61.所述火情无人机环绕所述火情点形成包围式方阵,所述火情无人机包括喷水无人机和干粉无人机,所述喷水无人机和所述干粉无人机间隔排列设置,相邻所述喷水无人机和所述干粉无人机的喷射范围交叉重叠;所述包围式方阵根据火势衰减情况向中心聚拢;
62.如果火势有向一侧蔓延趋势,所述火势蔓延反方向一侧的火情无人机a迅速从火情点两侧飞至火势蔓延一侧,并穿插进火势蔓延一侧的火情无人机b的方阵中,重新排列形成长条式方阵;如果火势有火焰尖端从空中向外席卷蔓延的趋势,部分所述喷水无人机上升至一定高度排列成围合式方阵,并以倾斜角度朝向火焰尖端喷射水雾,下方所述火情无人机重新调整间距并维持包围式方阵,且以倾斜角度朝向火焰根部同时喷射水雾和干粉,整体形成上下双层包围式方阵。
63.遇到较大险情,火情无人机派遣包括以下步骤:
64.第一步骤,接收所述火情位置信息和火势范围信息,确定为较大险情;
65.第二步骤,派遣该区域所有火情无人机,同时通过通讯通知其他区域无人机派遣点派遣火情无人机增援;
66.第三步骤,不同区域的火情无人机之间通过通讯系统相互联系,根据火势重新调整方阵的编排;
67.各区域火情无人机单独形成小队,以长条式方阵沿火势边界线设置,不同区域的火情无人机小队位于不同方向的火势边界线上,整体形成包围式方阵;或不同区域的火情无人机小队分布于竖直方向上的不同高度处,最低端的火情无人机小队c围绕火势边界线成围合式方阵,其他区域的火情无人机小队f向上依次向火情中心点聚拢成围合式方阵,整体形成立体空间上的锥形围合式方阵,且最顶端的一组火情无人机小队d采用投掷水弹的方法。
68.所述火情无人机编队中的无人机都配备有对应的替补无人机,所述替补无人机通过编写与所述火情无人机编队中对应无人机相同的算法程序,当所述火情无人机编队中有无人机损坏时,所述替补无人机立刻启动相应算法程序,填补空位。
69.包括无人机本体1,所述无人机本体1的机腹设置有摄像机2、环境检测传感器装置3和伸缩式喷水管4,所述无人机本体1的机顶设置有电动水箱5和风机6;
70.所述摄像机2外部罩设有透明罩7,与所述风机6对接的导风管8穿过电动水箱5连通所述透明罩7,风经电动水箱5与水进行换热形成冷风对摄像机2进行高效化的风冷散热,抗高温能力强,提高其从空中侦查火灾区的能力,且电动水箱5配套的水管9对接所述伸缩
式喷水管4,从伸缩式喷水管4喷水能够对起火点进行喷水灭火,消除小伙点的火灾隐患。
71.所述导风管8及水管9均设置于无人机本体1的内部,减少管道外露,防火风或水的温度被火烤而上升。
72.所述伸缩式喷水管4由至少两节管道依次轴向套接构成,位于最上端的管道通过金属软管12对接所述水管9,位于最上端的管道上还设置有通过连接杆13连接无人机本体1的机腹的上连板14,位于最下端的管道上设置有下连板15,所述上连板14与下连板15之间连接有电动推杆12,所述电动推杆12通过无人机本体1的飞行控制系统控制,通过电动推杆12能够控制伸缩式喷水管4的伸缩长度,从而便于调整喷水距离进行灭火。
73.所述无人机本体1的机顶设置有隔热罩16,所述电动水箱5及所述风机6均位于隔热罩16内,所述隔热罩16的顶部密布进风孔160,通过隔热罩16保护电动水箱5和风机6;所述导风管8连通透明罩7的侧面,所述透明罩7的其余侧面部分或全部密布出风孔70,便于出风;
74.所述摄像机2为与无人机本体1的飞行控制系统数据传输连接的热成像摄像机,提高消防视觉侦查能力。
75.所述环境检测传感器装置3包括温度传感器31、烟雾传感器32和空气湿度传感器33,所述温度传感器31、所述烟雾传感器32和所述空气湿度传感器33分别与无人机本体1的飞行控制系统信号传输连接,所述无人机本体1还具有gps定位装置10,无人机本体1的飞行控制系统及gps定位装置10均连接地面控制中心,不仅依靠摄像机2进行视觉侦查,还参考温度检测、烟雾检测、空气湿度检测等了解火灾情况,地面控制中心获取各项侦查数据及时了解火灾地区情况;
76.所述无人机本体1、电动推杆11、温度传感器31、烟雾传感器32及空气湿度传感器33的表面均涂覆有热反射涂层,提高抗热能力。
77.以上描述是本发明的优选实施例,对于本领域普通技术人员而言,不脱离本发明的方法还可以根据实际灾情做出若干调整,这些调整还视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。