1.本发明涉及风洞试验技术领域,具体涉及一种全动平尾直升机多部件气动干扰特性试验模拟方法。
背景技术:
2.直升机由于其气动布局的复杂性,存在包括旋翼、机身及垂平尾等多个气动部件。直升机在悬停、爬升、前飞、下降等状态下,由于飞行姿态和速度的变化,各气动部件存在不同程度的气动干扰,对直升机的飞行性能、飞行特性及飞行品质均会产生较大影响。其中,作为调整直升机飞行姿态的重要部件之一,平尾对直升机气动特性及操纵稳定性均有重要影响。尤其对于面积较大的全动平尾而言,其在悬停和小速度前飞时,受旋翼尾流影响较大,升力系数出现突变,导致机身俯仰力矩突增,严重降低了直升机的操纵稳定性及安全性。因此,必须准确获取旋翼、机身、平尾各部件之间的气动干扰规律,为各气动部件的设计及优化提供参考依据,进而改善直升机的纵向静稳定性。
3.直升机风洞试验是开展直升机气动特性研究的重要手段之一。通过对直升机各独立气动部件及组合后的试验模型在不同来流下的气动力测量,可以获得各气动部件之间的气动干扰特性,其中包括悬停和低速前飞时旋翼尾流引起的机身增重、机身对旋翼性能及旋翼尾流对全动平尾气动性能的影响。
技术实现要素:
4.一种全动平尾直升机多部件气动干扰特性试验模拟方法,可以准确获取旋翼、机身及全动平尾三者之间的气动干扰规律,为直升机的气动部件设计、布局优化及飞行操纵规律设计提供强有力的风洞试验数据支撑。
5.本发明通过下述技术方案实现:一种全动平尾直升机多部件气动干扰特性试验模拟方法,基于旋翼与机身组合模型风洞试验台实现,所述旋翼与机身组合模型风洞试验台包括:用于测量旋翼气动载荷的旋翼天平和扭矩天平,用于测量机身气动载荷的机身天平,和用于测量全动平尾载荷的平尾天平;s1、基于旋翼与机身组合模型风洞试验台试验获得直升机在同轴系下的旋翼气动载荷试验数据,和直升机在同轴系下的机身气动载荷试验数据及全动平尾气动载荷试验数据,具体步骤为:步骤1,基于旋翼与机身组合模型风洞试验台开展单独旋翼模型悬停试验,获得悬停时旋翼气动载荷r1;步骤2,基于旋翼与机身组合模型风洞试验台开展旋翼与机身组合模型悬停试验,获得悬停时旋翼与机身组合模型中旋翼气动载荷r2、悬停时机身气动载荷f1和悬停时全动平尾气动载荷h1;步骤3,基于旋翼与机身组合模型风洞试验台开展单独机身模型前飞试验,获得前
飞时机身气动载荷f2和前飞时全动平尾气动载荷h2;步骤4,基于旋翼与机身组合模型风洞试验台开展单独旋翼模型前飞试验,获得前飞时旋翼气动载荷r3;步骤5,基于旋翼与机身组合模型风洞试验台开展旋翼与机身组合模型前飞试验,获得前飞时旋翼气动载荷r4、前飞时机身气动载荷f3和前飞时全动平尾气动载荷h3;s2、根据旋翼气动载荷试验数据、机身气动载荷试验数据及全动平尾气动载荷试验数据使用干扰特性模型进行气动干扰特性分析得到直升机各部件之间的气动干扰特性。
6.所述单独旋翼模型悬停试验:在悬停试验间开展,用于测量悬停状态下单独旋翼的气动特性,操纵变量包括旋翼转速、旋翼总距,主要用于获取单独旋翼悬停时的气动载荷。
7.所述旋翼与机身组合模型悬停试验:在悬停试验间开展,用于测量悬停状态下旋翼与机身的气动特性,操纵变量包括旋翼转速、旋翼总距,主要用于获取旋翼机身组合状态下旋翼悬停时、机身及平尾的气动载荷。
8.所述单独机身模型前飞试验:在风洞中开展,用于测量单独机身在前飞状态下的气动特性,操纵变量包括来流风速、机身迎角、机身侧滑角、平尾安装角,主要用于测量单独机身在前飞状态下机身及平尾的气动载荷。
9.所述单独旋翼模型前飞试验:在风洞中开展,用于测量单独旋翼在前飞状态下的气动特性,操纵变量包括来流风速、旋翼轴倾角、旋翼转速、旋翼总距、周期变距角,主要用于测量单独旋翼在前飞状态下的气动载荷。
10.所述旋翼与机身组合模型前飞试验:在风洞中开展,用于测量旋翼与机身在前飞状态下的气动特性,操纵变量包括来流风速、旋翼轴倾角、旋翼转速、旋翼总距、旋翼周期变距、机身迎角、机身侧滑角、平尾安装角,主要用于测量旋翼与机身组合模型在前飞状态下旋翼、机身及平尾的气动载荷。
11.进一步优化方案为,步骤1中所述单独旋翼模型悬停试验和步骤2中所述旋翼与机身组合模型悬停试验的试验状态相同,试验时采用固定转速、改变旋翼总距的方式进行。
12.进一步优化方案为,步骤4中单独旋翼模型前飞试验和步骤5中旋翼与机身组合模型前飞试验的配平策略均采用定垂向力系数配平。
13.进一步优化方案为,单独旋翼模型前飞试验和旋翼与机身组合模型前飞试的定垂向力系数配平过程为:在给定主轴倾角、机身姿态、风速和旋翼转速下,通过操纵旋翼总距配平到所需的垂向力系数;配平过程中操纵旋翼周期变距使桨毂俯仰力矩和滚转力矩<20n
·
m,配平到指定试验值并稳定后,桨毂俯仰力矩和滚转力矩≤3n
·
m。
14.进一步优化方案为,旋翼气动载荷试验数据包括:悬停时旋翼气动载荷r1、悬停时旋翼与机身组合模型中旋翼气动载荷r2、前飞时旋翼气动载荷r3和前飞时旋翼气动载荷r4;所述旋翼气动载荷试验数据是先经过旋翼模型气动载荷系数统一换算到直升机重心,再归一化处理得到;机身气动载荷试验数据包括:悬停时机身气动载荷f1 、前飞时机身气动载荷f2和前飞时机身气动载荷f3;所述机身气动载荷试验数据是先经过机身模型气动载荷系数统一换算到直升机重心,再归一化处理得到;全动平尾气动载荷试验数据包括:悬停时全动平尾气动载荷h1、前飞时全动平尾
气动载荷h2和前飞时全动平尾气动载荷h3;所述全动平尾气动载荷试验数据是先经过全动平尾气动载荷系数统一换算到直升机重心,再归一化处理得到。
15.进一步优化方案为,所述旋翼气动载荷试验数据以桨毂风轴系给出,所述机身气动载荷试验数据以机身风轴系给出的,所述全动平尾气动载荷试验数据以机身风轴系给出的。
16.进一步优化方案为,旋翼气动载荷试验数据归一化处理以旋翼模型参考力f01和旋翼模型参考力矩m01为归一化因子,其中:式中,为大气密度、为旋翼桨尖速度、为旋翼桨盘面积、r为旋翼半径;机身气动载荷试验数据和全动平尾气动载荷试验数据归一化处理时均以机身模型参考力f02和机身模型参考力矩m02为归一化因子,其中:式中,为大气密度,为来流风速,为机身阻力面积,为机身模型长度。
17.进一步优化方案为,桨毂风轴系的原点为桨毂模型中心,其x轴沿迎来流方向为正,y轴垂直于来流向上为正,z轴按照右手法则确定;机身风轴系的原点为机身天平中心,x轴沿迎来流方向为正,y轴垂直于来流向上为正,z轴按右手法则确定。
18.进一步优化方案为,s2具体过程为:t1,通过干扰特性模型:悬停时旋翼与机身组合模型中旋翼气动载荷r2
‑
悬停时旋翼气动载荷r1,获得悬停时机身对旋翼尾流的干扰特性;t2,构造悬停时旋翼与机身组合模型中旋翼气动载荷r2与悬停时机身气动载荷f1的曲线图分析机身载荷在旋翼尾流作用下随旋翼载荷变化的关系,从而获得旋翼尾流对机身的干扰特性;构造悬停时旋翼与机身组合模型中旋翼气动载荷r2与悬停时全动平尾气动载荷h1的曲线图,分析全动平尾载荷在旋翼尾流作用下随旋翼载荷变化的关系,从而获得旋翼尾流对全动平尾的干扰特性;t3,通过干扰特性模型:前飞时机身气动载荷f3
‑
前飞时机身气动载荷f2,获得前飞状态下旋翼尾流对机身的干扰特性,通过干扰特性模型:前飞时全动平尾气动载荷h3
‑
前飞时全动平尾气动载荷h2,获得前飞状态下旋翼尾流对全动平尾的干扰特性;t4,通过干扰特性模型:前飞时旋翼气动载荷r4
‑
前飞时旋翼气动载荷r3,获得前
飞状态下机身对旋翼尾流的干扰特性。
19.本发明与现有技术相比,具有如下的优点和有益效果:1、本发明提供的一种全动平尾直升机多部件气动干扰特性试验模拟方法,可基于旋翼与机身组合模型风洞试验台进行单独旋翼模型悬停试验、旋翼与机身组合模型悬停试验、单独机身模型前飞试验、单独旋翼模型前飞试验和旋翼与机身组合模型前飞试验;获得在不同试验状态下直升机各部件气动载荷试验数据,依据干扰特性模型真实、高效地获得直升机各部件之间的气动干扰影响规律,可以准确获取旋翼、机身及全动平尾三者之间的气动干扰规律,为直升机的气动部件设计、布局优化及飞行操纵规律设计提供重要依据。
20.2、本发明提供的一种全动平尾直升机多部件气动干扰特性试验模拟方法,主要考虑前飞状态下或悬停状态下机身对旋翼尾流的干扰特性,将机身和全动平尾视为一体,此时由于全动平尾对旋翼尾流的干扰特性已经叠加至机身对旋翼尾流的干扰特性中,在保证试验真实有效的前提下减少不必要的试验过程。
附图说明
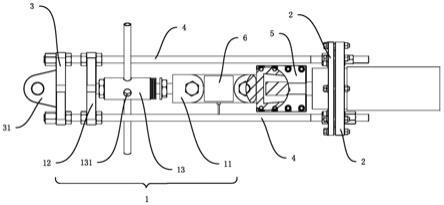
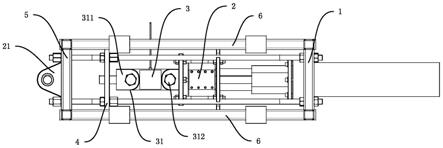
21.为了更清楚地说明本发明示例性实施方式的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。在附图中:图1为全动平尾直升机多部件气动干扰特性试验模拟方法流程示意图;图2为旋翼与机身组合模型前飞试验流程示意图;图3为实施例试验模型及装置示意图。
[0022]1‑
旋翼模型;2
‑
机身模型;3
‑
旋翼天平;4
‑
扭矩天平;5
‑
试验台;6
‑
机身天平;7
‑
全动平尾模型;8
‑
平尾天平。
具体实施方式
[0023]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0024]
实施例1本实施例提供一种全动平尾直升机多部件气动干扰特性试验模拟方法,基于一种旋翼与机身组合模型风洞试验台,旋翼与机身组合模型风洞试验台的测量系统包括为旋翼天平3、扭矩天平4、机身天平6、平尾天平8,试验内容包括单独旋翼模型试验、单独机身模型试验和旋翼与机身组合模型试验,如图1所示,具体包括以下步骤:步骤1,基于旋翼与机身组合模型风洞试验台开展单独旋翼模型悬停试验,获得悬停时旋翼气动载荷r1;步骤2,基于旋翼与机身组合模型风洞试验台开展旋翼与机身组合模型悬停试验,获得悬停时旋翼与机身组合模型中旋翼气动载荷r2、悬停时机身气动载荷f1,悬停时全动平尾气动载荷h1;步骤3,基于旋翼与机身组合模型风洞试验台开展单独机身模型前飞试验,获得前
飞时机身气动载荷f2,全动平尾气动载荷h2;步骤4,基于旋翼与机身组合模型风洞试验台开展单独旋翼模型前飞试验,获得前飞时旋翼气动载荷r3;步骤5,基于旋翼与机身组合模型风洞试验台开展旋翼与机身组合模型前飞试验,获得前飞时旋翼气动载荷r4,前飞时机身气动载荷f3,前飞时全动平尾气动载荷h3。
[0025]
根据以上步骤获得各部件气动载荷试验数据后,通过以下方法获得旋翼与机身气动干扰特性:(1)通过干扰特性模型悬停时旋翼与机身组合模型中旋翼气动载荷r2
‑
悬停时旋翼气动载荷r1,可获得悬停状态下机身对旋翼尾流的干扰特性;(2)通过构造悬停时旋翼与机身组合模型中旋翼气动载荷r2与悬停时机身气动载荷f1的曲线图,分析机身载荷在旋翼尾流作用下随旋翼载荷变化的关系,从而获得旋翼尾流对机身的干扰特性;构造悬停时旋翼与机身组合模型中旋翼气动载荷r2与悬停时全动平尾气动载荷h1的曲线图,分析全动平尾载荷在旋翼尾流作用下随旋翼载荷变化的关系,从而获得旋翼尾流对全动平尾的干扰特性;(3)通过干扰特性模型前飞时机身气动载荷f3
‑
前飞时机身气动载荷f2获得前飞状态下旋翼尾流对机身的干扰特性;通过干扰特性模型前飞时全动平尾气动载荷h3
‑
前飞时全动平尾气动载荷h2,获得前飞状态下旋翼尾流对全动平尾的干扰特性;(4)通过前飞时旋翼气动载荷r4
‑
前飞时旋翼气动载荷r3,可以获得前飞状态下机身对旋翼尾流的干扰特性。
[0026]
上述单独旋翼模型悬停试验和旋翼与机身组合模型悬停试验通常采用固定转速、改变旋翼总距的方式进行试验,试验状态基本相同,试验过程中主要由旋翼天平和扭矩天平分别测量旋翼气动载荷和旋翼功率,由机身天平和平尾天平分别测量机身、全动平尾气动载荷;单独机身试验方式为在给定主轴倾角、机身姿态、风速和桨毂转速下,试验过程中主要由机身天平、平尾天平分别测量机身、全动平尾载荷;单独旋翼模型前飞试验和旋翼与机身组合模型前飞试验的试验方法为在给定主轴倾角、机身姿态、风速和旋翼转速下,通过操纵旋翼总距配平到给定的垂向力系数,配平过程中操纵旋翼周期变距使桨毂俯仰力矩和滚转力矩小于20n
·
m,配平到指定试验值并稳定后,桨毂俯仰力矩和滚转力矩不大于3n
·
m,试验过程中主要由旋翼天平和扭矩天平分别测量旋翼气动载荷和旋翼功率,由机身天平和平尾天平分别测量机身、全动平尾气动载荷。
[0027]
所测得的旋翼模型试验数据以桨毂风轴系给出,机身模型试验数据及全动平尾模型试验数据均以机身风轴系给出。如图3所示,本实施例试验模型及装置所涉及到旋翼与机身组合模型风洞试验台的旋翼模型1,机身模型2,试验台5和全动平尾模型7;桨毂风轴系的原点为桨毂模型中心,x
h
轴沿来流方向为正,y
h
轴垂直于来流向上为正,z
h
轴按照右手法则确定;所述机身风轴系机身风轴系的原点为机身天平中心,x
f
轴沿迎来流方向为正,y
f
轴垂直于来流向上为正,z
f
轴按右手法则确定,全机重心为o点,对应的坐标系为x
‑
y
‑
z。
[0028]
在计算旋翼模型、机身模型、全动平尾模型的力和力矩系数时,采用不同的归一化因子。
[0029]
计算旋翼模型参考力、旋翼模型参考力矩采用旋翼桨尖速度ωr、大气密度ρ、旋翼桨盘面积πr2计算,公式如下:
机身模型参考力、机身模型参考力矩采用来流风速v、大气密度ρ、机身阻力面积s
f
、机身模型长度l
f
计算,公式如下:旋翼模型力和力矩系数分别用f01、m01进行计算;机身模型及全动平尾模型的力和力矩系数分别用f02和m02进行计算。
[0030]
开展气动干扰特性分析前,需将旋翼模型气动载荷系数、机身模型气动载荷系数及全动平尾模型气动载荷系数统一换算到全机重心处再进行下一步分析。
[0031]
实施例2如图2所示,本实施例基于旋翼与机身组合模型风洞试验台开展旋翼与机身组合模型前飞试验,以获得前飞时旋翼气动载荷r4,前飞时机身气动载荷f3,前飞时全动平尾气动载荷h3。
[0032]
在试验开始前,先判断旋翼与机身组合模型风洞试验台能否正常工作,在系统能够正常工作的情况下,改变全动平尾的安装角到试验值,采集零读数并存盘,启动旋翼与机身组合模型风洞试验台,在总距角和周期变距角为零的状态下,将旋翼转速升到工作转速安全运行,风洞开车;(1)调节风速到给定试验值,操纵主轴倾角到给定试验值;(2)操纵旋翼总距配平到给定垂向力系数,配平过程中操纵旋翼周期变距使桨毂俯仰力矩和滚转力矩小于20n
·
m;(3)配平到指定试验值并经过稳定时间
△
t后,需将桨毂俯仰力矩和滚转力矩控制在3n
·
m以内;(4)采集数据,处理并输出结果;(5)重复上述步骤1
‑
4直至完成该平尾安装角下的所有试验点。(其中配平策略均采用定垂向力系数配平。)风洞停车;旋翼台停车,重复上述试验直至所有平尾安装角下的试验点。
[0033]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。