3d照片的生成方法与装置、终端及可读存储介质
技术领域
1.本技术涉及图像处理技术领域,特别涉及一种3d照片的生成方法、3d照片的生成装置、终端及非易失性计算机可读存储介质。
背景技术:
2.自由视点渲染是一种通过对目标场景进行几何建模或者若干视角的影像合成一个新的视角的方法。这种技术可以用来合成3d照片。传统的基于几何建模的方法涉及大量的手工操作,基于图像的方法则通常需要拍摄多个视角的图像,且难以应对被前景遮挡的背景区域。神经渲染方案能生成高质量渲染结果,但是需要多张输入图像、耗费大量训练时间且对不同场景需要训练不同的模型。如何快捷地建立三维模型生成3d照片成为本领域亟待解决的问题。
技术实现要素:
3.本技术实施方式提供了一种3d照片的生成方法、3d照片的生成装置、终端及非易失性计算机可读存储介质。
4.本技术实施方式的种3d照片的生成方法包括:分割二维的待处理图像的前景和背景以获取分割图像;获取所述待处理图像中所述前景的色彩信息和所述背景的色彩信息;获取所述待处理图像中所述前景的深度信息和所述背景的深度信息;处理所述分割图像以获取前景轮廓图及背景轮廓图,所述前景轮廓图包含所述前景的轮廓,所述背景轮廓图包含所述背景的轮廓;根据所述前景轮廓图、所述前景的色彩信息、所述前景的深度信息、所述背景轮廓图、所述背景的色彩信息、及所述背景的深度信息获取三维模型;及渲染所述三维模型以获取3d照片。
5.本技术实施方式的3d照片的生成装置包括获取模块及渲染模块。所述获取模块用于分割二维的待处理图像的前景和背景以获取分割图像;获取所述待处理图像中所述前景的色彩信息和所述背景的色彩信息;获取所述待处理图像中所述前景的深度信息和所述背景的深度信息;处理所述分割图像以获取前景轮廓图及背景轮廓图,所述前景轮廓图包含所述前景的轮廓,所述背景轮廓图包含所述背景的轮廓;根据所述前景轮廓图、所述前景的色彩信息、所述前景的深度信息、所述背景轮廓图、所述背景的色彩信息、及所述背景的深度信息获取三维模型。所述渲染模块用于渲染所述三维模型以获取3d照片。
6.本技术实施方式的终端包括一个或多个处理器、存储器和一个或多个程序。其中,所述一个或多个程序被存储在所述存储器中,并且被所述一个或多个处理器执行,所述程序包括用于执行本技术实施方式所述的3d照片的生成方法的指令。3d照片的生成方法包括:分割二维的待处理图像的前景和背景以获取分割图像;获取所述待处理图像中所述前景的色彩信息和所述背景的色彩信息;获取所述待处理图像中所述前景的深度信息和所述背景的深度信息;处理所述分割图像以获取前景轮廓图及背景轮廓图,所述前景轮廓图包含所述前景的轮廓,所述背景轮廓图包含所述背景的轮廓;根据所述前景轮廓图、所述前景
的色彩信息、所述前景的深度信息、所述背景轮廓图、所述背景的色彩信息、及所述背景的深度信息获取三维模型;及渲染所述三维模型以获取3d照片。
7.本技术实施方式的一种包含计算机程序的非易失性计算机可读存储介质,当所述计算机程序被一个或多个处理器执行时,使得所述处理器实现本技术实施方式所述的3d照片的生成方法。3d照片的生成方法包括:分割二维的待处理图像的前景和背景以获取分割图像;获取所述待处理图像中所述前景的色彩信息和所述背景的色彩信息;获取所述待处理图像中所述前景的深度信息和所述背景的深度信息;处理所述分割图像以获取前景轮廓图及背景轮廓图,所述前景轮廓图包含所述前景的轮廓,所述背景轮廓图包含所述背景的轮廓;根据所述前景轮廓图、所述前景的色彩信息、所述前景的深度信息、所述背景轮廓图、所述背景的色彩信息、及所述背景的深度信息获取三维模型;及渲染所述三维模型以获取3d照片。
8.本技术实施方式的3d照片的生成方法、3d照片的生成装置、终端和非易失性计算机可读存储介质中,仅需根据一张待处理图像即可建立三维模型并生成3d照片;利用前景轮廓图及背景轮廓图能够高效率地区分前景和背景并快速构建三维模型,利用前景/背景的轮廓图、色彩信息、和深度信息构建三维模型,数据处理量小,处理复杂度低,能够减少生成3d照片的过程中的报错;且最终生成3d照片的效率较高,3d照片的文件大小较小,能够便于用户实时地预览、分享、应用3d照片。
9.本技术实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
10.本技术的上述和/或附加的方面和优点可以从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
11.图1是本技术某些实施方式的3d照片的生成方法的流程示意图;
12.图2是本技术某些实施方式的终端的结构示意图;
13.图3是本技术某些实施方式的3d照片的生成装置的结构示意图;
14.图4是本技术某些实施方式的3d照片的生成方法的流程示意图;;
15.图5是本技术某些实施方式的确定待处理图像的场景示意图;
16.图6是本技术某些实施方式的识别人体关节点的场景示意图;
17.图7是本技术某些实施方式的3d照片的生成方法的流程示意图;
18.图8是本技术某些实施方式的获取前景的色彩信息的场景示意图;
19.图9是本技术某些实施方式的3d照片的生成方法的流程示意图;
20.图10是本技术某些实施方式的获取前景的深度信息的场景示意图;
21.图11是本技术某些实施方式的3d照片的生成方法的流程示意图;
22.图12是本技术某些实施方式的背景色彩补全的场景示意图;
23.图13是本技术某些实施方式的3d照片的生成方法的流程示意图;
24.图14是本技术某些实施方式的背景深度补全的场景示意图;
25.图15是本技术某些实施方式的获取背景的色彩信息和深度信息示意图;
26.图16是本技术某些实施方式的3d照片的生成方法的流程示意图;
27.图17是本技术某些实施方式的3d照片的生成方法的流程示意图;
28.图18是本技术某些实施方式的异常像素的示意图;
29.图19是本技术某些实施方式的异常像素的示意图;
30.图20是本技术某些实施方式的异常像素的示意图;
31.图21是本技术某些实施方式的轮廓点的示意图;
32.图22是本技术某些实施方式前景轮廓的示意图;
33.图23是本技术某些实施方式的3d照片的生成方法的流程示意图;
34.图24是本技术某些实施方式的3d照片的生成方法的流程示意图;
35.图25是本技术某些实施方式的3d照片的生成方法的流程示意图;
36.图26是本技术某些实施方式的获取原始掩膜的场景示意图;
37.图27是本技术某些实施方式的3d照片的生成方法的流程示意图;
38.图28是本技术某些实施方式的3d照片的生成方法的流程示意图;
39.图29是本技术某些实施方式的3d照片的生成方法的流程示意图;
40.图30是本技术某些实施方式的3d照片的生成方法的流程示意图;
41.图31是本技术某些实施方式的3d照片的生成方法的流程示意图;
42.图32是本技术某些实施方式前景轮廓的示意图;
43.图33是本技术某些实施方式的获取三角网格的场景示意图;
44.图34是本技术某些实施方式的获取三维网格的场景示意图;
45.图35是本技术某些实施方式的3d照片的生成方法的流程示意图;
46.图36是本技术某些实施方式的获取三维模型的场景示意图;
47.图37是本技术某些实施方式的获取渲染图像的场景示意图;
48.图38是本技术某些实施方式的计算机可读存储介质与处理器的连接关系示意图。
具体实施方式
49.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中,相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术的实施方式,而不能理解为对本技术的实施方式的限制。
50.3d照片是一种可以从多个视角观察被拍摄场景的照片,例如在手机上观看3d照片时,3d照片的视角随手机的不同倾斜程度而改变,从而用户能够从不同视角观察到3d照片中的场景。3d照片也可看做是不同视角的多帧图像合成的一张照片或一个视频。
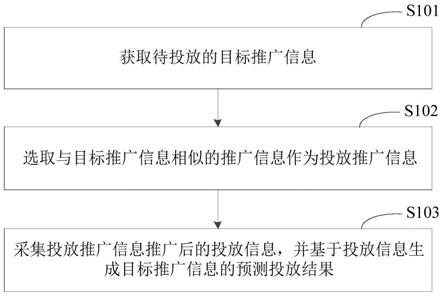
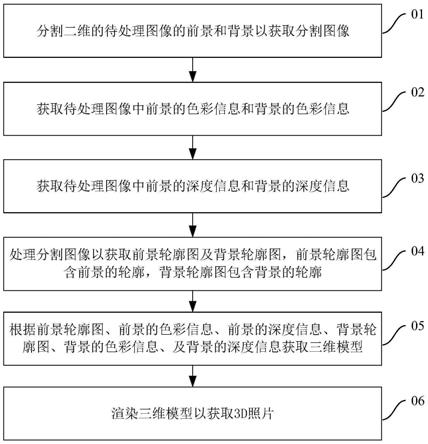
51.本技术实施方式提供一种3d照片的生成方法。请参阅图1,本技术实施方式的3d照片的生成方法包括以下步骤:
52.01:分割二维的待处理图像的前景和背景以获取分割图像;
53.02:获取待处理图像中前景的色彩信息和背景的色彩信息;
54.03:获取待处理图像中前景的深度信息和背景的深度信息;
55.04:处理分割图像以获取前景轮廓图及背景轮廓图,前景轮廓图包含前景的轮廓,背景轮廓图包含背景的轮廓;
56.05:根据前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩
信息、及背景的深度信息获取三维模型;及
57.06:渲染三维模型以获取3d照片。
58.请参阅图2,本技术实施方式还提供一种终端100,本技术实施方式的3d照片的生成方法可应用于终端100。终端100包括一个或多个处理器20、存储器30、和一个或多个程序。其中一个或多个程序被存储在存储器30中,并且被一个或多个处理器20执行,程序包括用于执行本技术实施方式的3d照片的生成方法的指令。即,处理器20执行程序时,处理器20可以实现步骤01、02、03、04、05、及06中的方法。即,处理器20可以用于:分割二维的待处理图像的前景和背景以获取分割图像;获取待处理图像中前景的色彩信息和背景的色彩信息;获取待处理图像中前景的深度信息和背景的深度信息;处理分割图像以获取前景轮廓图及背景轮廓图,前景轮廓图包含前景的轮廓,背景轮廓图包含前景的轮廓;根据前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩信息、及背景的深度信息获取三维模型;及渲染三维模型以获取3d照片。
59.具体地,终端100可以是手机、平板电脑、显示设备、笔记本电脑、柜员机、闸机、智能手表、头显设备、游戏机、可移动平台等终端100设备,在此不一一列举。如图2所示,本技术实施方式以终端100是手机为例进行说明,可以理解,终端100的具体形式并不限于手机。
60.请参阅图2及图3,本技术实施方式的3d照片的生成装置10可应用于终端100。3d照片的生成装置10包括获取模块12及渲染模块14。获取模块12可用于实现步骤01、02、03、04、及05中的方法,渲染模块14可用于实现步骤06中的方法。即,获取模块12可用于:分割二维的待处理图像的前景和背景以获取分割图像;获取待处理图像中前景的色彩信息和背景的色彩信息;获取待处理图像中前景的深度信息和背景的深度信息;处理分割图像以获取前景轮廓图及背景轮廓图,前景轮廓图包含前景的轮廓,背景轮廓图包含前景的轮廓;根据前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩信息、及背景的深度信息获取三维模型。渲染模块14可用于渲染三维模型以获取3d照片。
61.本技术实施方式的3d照片的生成方法、3d照片的生成装置10和终端100中,分别对待处理图像的前景获取前景轮廓图、前景的色彩信息、前景的深度信息,及对待处理图像的背景获取背景轮廓图、背景的色彩信息、及背景的深度信息,以构建包含有前景和后景的三维模型,通过三维模型获取3d照片,仅需输入一张待处理图像即可快速输出一张3d照片。
62.下面结合附图做进一步说明。
63.请参阅图1,步骤01:分割二维的待处理图像的前景和背景以获取分割图像,中,二维的待处理图像可以是由终端100的摄像头直接采集的一帧图像,也可以是存储在终端100的存储器30中的一帧图像,例如终端100从云端下载后存储在存储器30中的图像、终端100通过蓝牙从其他终端100获取的图像等,在此不做限制。
64.请参阅图1及图4,在某些实施方式中,在步骤01之前,即在分割二维的待处理图像的前景和背景以获取分割图像之前,本技术的3d照片的生成方法还可包括确定二维图像是否为待处理图像的步骤。具体地,3d照片的生成方法还可包括:
65.07:检测二维图像中的人像和人像的数量;
66.08:当人像的数量为一个时,获取人像的人体关键点,及获取人像在二维图像中的姿态;
67.09:根据人体关键点检测人像是否为半身人像;及
68.010:在人像为半身人像,且姿态满足预设条件时,确定二维图像为待处理图像。
69.请结合图2,在某些实施方式中,处理器20还可以用于实现步骤07、08、09、及010中的方法。即,处理器20还可以用于:检测二维图像中的人像和人像的数量;当人像的数量为一个时,获取人像的人体关键点,及获取人像在二维图像中的姿态;根据人体关键点检测人像是否为半身人像;在人像为半身人像,且姿态满足预设条件时,确定二维图像为待处理图像。
70.请结合图3,在某些实施方式中,3d照片的生成装置10还可包括确定模块16。确定模块16可以用于实现步骤07、08、09、及010中的方法。即,确定模块16可以用于:检测二维图像中的人像和人像的数量;当人像的数量为一个时,获取人像的人体关键点,及获取人像在二维图像中的姿态;根据人体关键点检测人像是否为半身人像;在人像为半身人像,且姿态满足预设条件时,确定二维图像为待处理图像。
71.具体地,3d照片能够带给用户“3d”的观感,在于用户在终端100观看3d照片时,能够通过倾斜终端100观察到3d照片中的不同视点的背景,而3d照片中的前景的视点往往是固定的。当用户想要将带有人像的二维图像生成3d照片时,人像往往是3d照片的前景部分。如果二维图像中包括多个人像,则难以确定将哪一个人像作为3d照片中视点固定的前景,且人像数量过多时,背景被遮挡的区域也较大,最终获取的3d照片中可观察的视角的角度也较小,可能导致“3d”的观感不明显。在本技术的实施例中,可通过实例分隔算法检测二维图像是否存在人像,及检测人像的数量,以确定二维图像是否能够作为待处理图像。在一个实施例中,当人像的数量为一个时,确定二维图像为待处理图像。
72.需要说明的是,本技术的实施方式不局限于将人像的数量为一个的二维图像确定为待处理图像。二维图像也可以是以物体、动物、植物等作为前景的图像。在某些实施方式中,可通过实例分隔算法检测二维图像中的前景部分,前景部分可包括一个或多个对象,前景部分的对象可以是人像、物体、动物、植物等等,在此不一一列举。在一个实施例中,可检查二维图像的焦点,根据二维图像的焦点位置确定二维图像中前景部分的目标对象,根据二维图像生成的3d照片中,目标对象的视点不改变。在另一个实施例中,终端100显示实例分隔算法检测到的各个前景部分的对象,用户可选取其中一个对象作为目标对象,根据二维图像生成的3d照片中,目标对象的视点不改变。
73.进一步地,本技术的实施方式不局限于将目标对象的数量为一个的二维图像确定为待处理图像。当二维图像中目标对象的数量为多个时,依然可以根据步骤01、02、03、04、05、及06中的方法将待处理图像生成3d照片。
74.请参阅图5,在某些实施方式中,当二维图像中人像的数量为一个时,为了确保根据二维图像生成的3d照片具有较佳的“3d”观感,可以获取人像的人体关键点、根据人体关键点检测人像是否为半身人像、及获取人像在二维图像中的姿态、检测姿态是否满足预设条件,以在人像为半身人像,且姿态满足预设条件时,确定二维图像为待处理图像。
75.具体地,当人像不为半身人像时,人像的下半身尤其是膝盖部分以下的部分在二维图像中的深度与周围地面的深度非常接近,可能存在难以分割二维图像的前景和背景的问题;且最终获取的3d照片中,人像的下半身部分周边的背景可变动的视点范围较小,“3d”观感不明显,因此可选取人像为半身人像的二维图像作为待处理图像。类似地,人像在二维图像中的姿态如果倾斜程度较高,例如呈图5中的图5.8示意的姿态,则同样存在难以分割
二维图像的前景和背景的问题、及人像周边的背景可变动的视点范围较小,“3d”观感不明显的问题,因此可选取人像的姿态满足预设条件的二维图像作为待处理图像。在一个实施例中,需要同时满足人像为半身人像,且姿态满足预设条件时,才确定二维图像为待处理图像。
76.请结合图6,具体地,可通过人体姿态估计算法识别拍摄图像中的每个人的人体关键点。其中,人体姿态估计算法可以包括但不限于pifpaf(part intensity field
‑
part association fields,pifpaf)、视觉定位模型算法(posenet)、或者yolov4(you only look once version four,yolov4)等算法,在此不一一列举。人体关键点可包括与肢体对应的关键点,例如肩部关键点、肘部关键点、手部关键点、手臂关键点、膝盖关键点、脚部关键点等等。
77.请结合图5及图6,在确定人像是否为半身人像时,首先检测人体关键点是否被遮挡。在一个实施例中,若人体关键点不完整,且人像与二维图像的边界不相邻,则认为人体关键点被遮挡,如图5中的图5.5所示。若人像与二维图像的边界相邻,则即便人体关键点不完整,也认为人体关键点没有被遮挡,例如图5中的图5.1、图5.2、图5.3、图5.6、及图5.7所示。若体人关键点完整,则无论人像是否与二维图像的边界相邻,均认为人体关键点没有被遮挡,例如图5中的图5.4及图5.8所示。在人体关键点没有被遮挡的基础上,检测人体关键点中的膝盖关键点j1和脚部关键点j2,若能检测到膝盖关键点j1和脚部关键点j2中任意一个,则确定人像不为半身人像,例如图5中的图5.4、图5.6、图5.7、及图5.8所示。若在人体关键点没有被遮挡的基础上,不能检测到膝盖关键点j1和脚部关键点j2,则确定人像为半身人像,例如图5中的图5.1、图5.2、及图5.3所示。
78.请参阅图5,满足预设条件的姿态包括人像相对二维图像的高度方向y的倾斜角度小于或等于20
°
的姿态。在一个实施例中,可根据人体关键点获取人像的中心轴,当人像的中心轴与二维图像的高度方向y之间的夹角小于或等于20
°
时,认为人像的姿态满足预设条件。当人像的中心轴o1与二维图像的高度方向y之间的夹角大于20
°
时,认为人像的姿态不满足预设条件,如图5中的图5.8所示。
79.综上,在本技术的实施方式中,在人像为半身人像,且姿态满足预设条件时,确定二维图像为待处理图像,以确保根据待处理图像获取的3d照片具有较佳的“3d”观感。需要说明的是,本技术的实施方式不局限于将半身人像的待处理图像生成3d照片。请结合图1,只要二维图像能够在步骤01中分割出前景和背景,即可将二维图像确定为待处理图像,并根据步骤01、02、03、04、05、及06中的方法将待处理图像生成3d照片。
80.请参阅图1,在某些实施方式中,01:分割二维的待处理图像的前景和背景以获取分割图像,具体地,请结合图8,图8中p0是待处理图像,p1是分割图像。分割图像p1是一帧二值图像,二值分别对应前景和背景,例如是由黑色和白色构成的二值图像,黑色对应背景,白色对应前景。在一个实施例中,可通过抠图算法分隔出待处理图像的前景和背景。抠图算法可包括bisenet算法、pointrend算法、deep image matting算法等等,在此不一一列举。在又一个实施例中,可建立抠图模型,对训练好的模型输入一帧待处理图像,通过抠图模型分隔待处理图像以输出分割图像。具体地,作为实施例的一种,抠图模型可基于如下关系式:i=αf (1
‑
α)b。其中,i为待处理图像,f为图像的前景,b为图像的背景,α为蒙版。根据此关系式可计算待处理图像中每个像素属于前景或属于背景的概率,由此,将多帧待处理图
像输入抠图模型进行充分训练后,可通过训练好的抠图模型分隔待处理图像以输出分割图像。
81.请参阅图7,在某些实施方式中,02:获取待处理图像中前景的色彩信息,包括:
82.021:根据分割图像与待处理图像获取前景图,前景图包括前景的色彩信息。
83.请结合图2,在某些实施方式中,处理器20还可用于实现步骤021。即,处理器20还可以用于:根据分割图像与待处理图像获取前景图,前景图包括前景的色彩信息。
84.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤021。即,获取模块12还可以用于:根据分割图像与待处理图像获取前景图,前景图包括前景的色彩信息。
85.请结合图8,具体地,图8中的p0是待处理图像的示例,p1是根据待处理图像p0获取的分割图像。用分割图像p1作为蒙版截取待处理图像p0,可以获取前景图p2,前景图p2仅包括前景的色彩信息,即前景图p2中与待处理图像p0的背景对应的部分不包括背景的色彩信息。
86.请参阅图9,在某些实施方式中,03:获取待处理图像中前景的深度信息,包括:
87.031:以待处理图像及分割图像作为输入,采用前景预测算法,获取前景的深度信息。
88.请结合图2,在某些实施方式中,处理器20还可用于实现步骤031。即,处理器20还可以用于:以待处理图像及分割图像作为输入,采用前景预测算法,获取前景的深度信息。
89.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤031。即,获取模块12还可以用于:以待处理图像及分割图像作为输入,采用前景预测算法,获取前景的深度信息。
90.请结合图10,p1是根据待处理图像获取的分割图像,p3是根据分割图像p1获取的前景深度图,前景深度图p3仅包括前景的深度信息,即前景深度图p3中与待处理图像的背景对应的部分不包括背景的深度信息。
91.在一个实施例中,可基于前景预测算法构建前景预测模型。以前景为人像为例,预先将包含人像的二维rgb图像输入前景预测模型进行训练,前景预测模型根据前景预测算法对二维rgb图像中的人像部分的深度进行估算。示例性地,前景预测算法根据pifu(pixel
‑
aligned implicit function,pifu)函数关系:f(f(x),z(x))=s,确定二维rgb图像中的人像部分的二维像素点在三维空间的位置。其中s∈r。x=π(x)表示3d点x在二维图像上的投影位置。z(x)表示x在此二维图像中对应的相机坐标系下的深度值。f(x)=g(i(x))表示二维图像在x处的深度学习的特征向量,g(
·
)是由一个全卷积网络组成。前景预测模型训练完成后,以待处理图及分割图像作为输入,即可获取前景的深度信息。
92.在某些实施方式中,03:获取待处理图像中前景的深度信息,还可包括在拍摄二维图像时,通过终端100的测距装置获取二维图像的深度信息,即待处理图像的深度信息,根据待处理图像的深度信息和分割图像获取待处理图像中前景的深度信息。其中,测距装置可包括tof模组、结构光模组、或激光雷达等,在此不做限制。根据分割图像可截取待处理图像中的前景部分,待处理图像中的前景部分对应的深度信息即为待处理图像中前景的深度信息。
93.请参阅图11,在某些实施方式中,02:获取待处理图像中背景的色彩信息,还包括:
94.022:根据分割图像与待处理图像获取背景图,背景图中包含被前景遮挡的遮挡区
域及除遮挡区域以外的非遮挡区域;
95.023:利用遮挡区域周围的色彩信息获取靠近遮挡区域预定范围内的非遮挡区域的色彩信息以作为补全色彩;及
96.024:根据补全色彩,采用图像补全算法对背景图中预定范围内的非遮挡区域的色彩进行补全,以获取背景的色彩信息。
97.请结合图2,在某些实施方式中,处理器20还可用于实现步骤022、023、及024。即,处理器20还可以用于:根据分割图像与待处理图像获取背景图,背景图中包含被前景遮挡的遮挡区域及除遮挡区域以外的非遮挡区域;利用遮挡区域周围的色彩信息获取靠近遮挡区域预定范围内的非遮挡区域的色彩信息以作为补全色彩;及根据补全色彩,采用图像补全算法对背景图中预定范围内的非遮挡区域的色彩进行补全,以获取背景的色彩信息。
98.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤022、023、及024。即,获取模块12还可以用于:根据分割图像与待处理图像获取背景图,背景图中包含被前景遮挡的遮挡区域及除遮挡区域以外的非遮挡区域;利用遮挡区域周围的色彩信息获取靠近遮挡区域预定范围内的非遮挡区域的色彩信息以作为补全色彩;及根据补全色彩,采用图像补全算法对背景图中预定范围内的非遮挡区域的色彩进行补全,以获取背景的色彩信息。
99.请结合图12,如图12中左图所示,背景图p4中的非遮挡区域s1包含有背景的色彩,而遮挡区域s2(白色人形区域)是色彩信息缺失的区域。利用图像补全算法可以通过靠近遮挡区域s2预定范围内的非遮挡区域s1的色彩对遮挡区域s2缺失的色彩进行补全。
100.其中,预定范围内可以是预定个数的像素范围内,例如预定范围内指距离遮挡区域s2和非遮挡区域s1的边界为1个、2个、3个、4个、或更多个像素的范围内。
101.在一个实施例中,可基于图像补全算法构建图像补全模型。图像补全模型对遮挡区域s2的色彩补全处理包括两个步骤。一个步骤是识别遮挡区域s2预定范围内的非遮挡区域s1的语义。其中,语义指邻近遮挡区域s2的非遮挡区域s1是什么东西,例如人物、动物、植物、景物等。例如,非遮挡区域s1包括一块草地,草地的一部分被遮挡区域s2遮挡。通过对邻近遮挡区域s2的非遮挡区域s1的语义识别,能够识别出非遮挡区域s1包括一块草地,且草地在非遮挡区域s1与遮挡区域s2的交界处中断,那么图像补全模型能够推测出遮挡区域s2大概率遮挡了一块草地,在对遮挡区域s2缺失的色彩进行补全时会还原草地的质感。另一个步骤是根据非遮挡区域s1的色彩信息对遮挡区域s2进行色彩填充。其中,色彩填充是一个迭代的过程,通过多次色彩填充的迭代将部分遮挡区域s2的色彩补全,成为非遮挡区域s1的一部分,如图12中右图所示。经过色彩补全后的背景图p4’(图12中右图)中,非遮挡区域s1’向原遮挡区域s2的内部扩张,遮挡区域s2’(白色类人形区域)相对原遮挡区域s2向内部收缩。非遮挡区域s1’的色彩信息即为最终获取的色彩信息。
102.对比图12中经过色彩补全前后的背景图p4与p4’,可见色彩补全后的背景图p4’补全了原先被前景(即遮挡区域)遮挡的部分背景,即补全了待处理图像中被遮挡的部分背景。如此,根据色彩补全后的背景的色彩信息获取的3d照片中能够具有不同于待处理图像的视点,使用户能够在3d照片中看到待处理图像中被遮挡的部分背景,给用户以“3d”的观感。
103.请参阅图13,在某些实施方式中,03:获取待处理图像中背景的深度信息,还包括:
104.032:采用单目深度预测算法对待处理图进行处理以获取深度图像;
105.033:根据分割图像及深度图像获取初始深度图,初始深度图中包含被前景遮盖的遮盖区域及除遮盖区域以外的非遮盖区域;
106.034:利用遮盖区域周围的深度信息获取靠近遮盖区域预定范围内的非遮盖区域的深度信息以作为补全深度;及
107.035:根据补全深度,采用图像补全算法对初始深度图中预定范围内的非遮盖区域的深度进行补全,以获取背景的深度信息。
108.请结合图2,在某些实施方式中,处理器20还可用于实现步骤032、033、034、及035。即,处理器20还可以用于:采用单目深度预测算法对待处理图进行处理以获取深度图像;根据分割图像及深度图像获取初始深度图,初始深度图中包含被前景遮盖的遮盖区域及除遮盖区域以外的非遮盖区域;利用遮盖区域周围的深度信息获取靠近遮盖区域预定范围内的非遮盖区域的深度信息以作为补全深度;及根据补全深度,采用图像补全算法对初始深度图中预定范围内的非遮盖区域的深度进行补全,以获取背景的深度信息。
109.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤032、033、034、及035。即,获取模块12还可以用于:采用单目深度预测算法对待处理图进行处理以获取深度图像;根据分割图像及深度图像获取初始深度图,初始深度图中包含被前景遮盖的遮盖区域及除遮盖区域以外的非遮盖区域;利用遮盖区域周围的深度信息获取靠近遮盖区域预定范围内的非遮盖区域的深度信息以作为补全深度;及根据补全深度,采用图像补全算法对初始深度图中预定范围内的非遮盖区域的深度进行补全,以获取背景的深度信息。
110.请结合图14,深度图像p4是以色阶反映待处理图像p0中的像素点在三维空间中的深度值的图像。例如色阶为灰阶,深度图中像素点对应的灰度值越高,表示该像素点的深度值越高。在一个实施例中,可以以分割图像p1作为蒙版截取深度图像p5中的背景部分以获取初始深度图p6。初始深度图p6是仅包含背景深度信息的深度图像。具体地,初始深度图p6中的非遮盖区域s1包含有背景的深度,而遮盖区域s2(白色人形区域)是深度信息缺失的区域。
111.请结合图12及图14,在某些实施方式中,与图像补全算法对背景图中预定范围内的非遮挡区域的色彩进行补全的方法类似,可根据初始深度图p6中的非遮盖区域s1的深度值(可表现为深度值对应的色阶,下同)对部分遮盖区域s2的深度值进行补全,以获取补全后的背景深度图p6’,即获取背景的深度信息。
112.在一个实施例中,根据初始深度图p6中的与遮盖区域s2邻近的部分非遮盖区域s1的深度值的数值对与非遮盖区域s1邻近的部分遮盖区域s2的深度值的数值进行补全。例如初始深度图p6中白色人形区域s2的“耳朵”附近的非遮盖区域s1的深度值为100mm,则以100mm作为白色人形区域s2的“耳朵”区域的深度值,获取深度值的“耳朵”区域成为背景深度图p6’中新的非遮盖区域。
113.在另一个实施例中,根据初始深度图p6中的与遮盖区域s2邻近的部分非遮盖区域s1的深度值在初始深度图p6中的灰阶值对与非遮盖区域s1邻近的部分遮盖区域s2在初始深度图p6中的灰阶值进行补全。例如初始深度图p6中白色人形区域s2的“耳朵”附近的非遮盖区域s1的灰阶值为149,则以149作为白色人形区域s2的“耳朵”区域的灰阶值,获取灰阶值的“耳朵”区域成为背景深度图p6’中新的非遮盖区域,将背景深度图p6’中非遮盖区域的
灰阶值换算成对应的深度值即可获取背景的深度信息。
114.请参阅图15,在某些实施方式中,可基于图像补全算法构建图像补全模型。对图像补全模型输入根据同一帧待处理图像p0获取的背景图p4和深度图像p5,即可由图像补全模型输出背景的色彩信息和背景的深度信息。其中,背景图p4中的遮挡区域s2不仅是色彩信息缺失的区域,同时也是深度信息缺失的区域。同理,深度图像p5中的遮盖区域s2不仅是深度信息缺失的区域,同时也是色彩信息缺失的区域。对于根据同一帧待处理图像p0获取的背景图p4和深度图像p5,遮挡背景的前景是相同的,因此在背景图p4中色彩信息缺失的区域与深度图像p5中色彩信息缺失的区域相同,且在背景图p4中深度信息缺失的区域与深度图像p5中深度信息缺失的区域也相同。在一个实施例中,图像补全模型综合考虑背景图p4中非遮挡区域s1的色彩和深度图像p5中非遮盖区域s1的深度进行语义识别,并结合语义识别的结果、非遮挡区域s1的色彩、和非遮盖区域s1的深度同时进行色彩和深度的补全,以获取背景的色彩信息和深度信息。
115.在某些实施方式中,03:获取待处理图像中背景的深度信息,还可包括在拍摄二维图像时,通过终端100的测距装置获取二维图像的深度信息,即待处理图像的深度信息,根据待处理图像的深度信息和分割图像获取待处理图像中背景的深度信息。其中,测距装置可包括tof模组、结构光模组、或激光雷达等,在此不做限制。根据分割图像可截取待处理图像中的背景部分,待处理图像中的背景部分对应的深度信息即为待处理图像中背景的深度信息。
116.请参阅图16,在某些实施方式中,04:处理分割图像以获取前景轮廓图,包括:
117.041:对分割图像的前景和/或背景进行形态学面积运算以获取前景掩膜;
118.042:获取前景掩膜中的所有轮廓点;
119.043:从所有轮廓点中找出前景掩膜中前景部分的有效前景轮廓点;
120.044:根据每个有效前景轮廓点与其他有效前景轮廓点之间的距离及预设的访问方向获取前景轮廓边界;及
121.045:根据前景轮廓边界形成前景轮廓图。
122.请结合图2,在某些实施方式中,处理器20还可用于实现步骤041、042、043、044、及045。即,处理器20还可以用于:对分割图像的前景和/或背景进行形态学面积运算以获取前景掩膜;获取前景掩膜中的所有轮廓点;从所有轮廓点中找出前景掩膜中前景部分的有效前景轮廓点;及根据每个有效前景轮廓点与其他有效前景轮廓点之间的距离及预设的访问方向获取前景轮廓边界;及根据前景轮廓边界形成前景轮廓图。
123.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤041、042、043、044、及045。即,获取模块12还可以用于:对分割图像的前景和/或背景进行形态学面积运算以获取前景掩膜;获取前景掩膜中的所有轮廓点;从所有轮廓点中找出前景掩膜中前景部分的有效前景轮廓点;及根据每个有效前景轮廓点与其他有效前景轮廓点之间的距离及预设的访问方向获取前景轮廓边界;及根据前景轮廓边界形成前景轮廓图。
124.分割图像中可能存在“孤岛”、“空洞”、“狭长区域”等问题区域,导致根据分割图像生成轮廓时出错。例如步骤044:获取前景轮廓边界,会在“孤岛”、“空洞”、“狭长区域”等问题区域反复循环导致前景轮廓边界获取失败。步骤041:对分割图像的前景和/或背景进行形态学面积运算以获取前景掩膜,通过对分割图像的前景和/或背景进行形态学面积运算,
消除分割图像中可能存在的“孤岛”、“空洞”、“狭长区域”等问题区域,使后续获取前景轮廓边界的步骤能够顺利进行。
125.其中,“狭长区域”是指狭长的前景像素或背景像素形成的区域。在一个实施例中,“孤岛”可以是前景像素被背景像素包围形成的前景像素孤岛;“空洞”可以是背景像素被前景像素包围形成的背景像素空洞。在另一个实施例中,“孤岛”可以是背景像素被前景像素包围形成的背景像素孤岛;“空洞”可以是前景像素被背景像素包围形成的前景像素空洞。在此不作限制。
126.具体地,请参阅图17,041:对分割图像的前景和/或背景进行形态学面积运算以获取前景掩膜,包括:
127.411:对分割图像执行背景面积开运算以获取第一前景去空洞掩膜;
128.412:对第一前景去空洞掩膜执行前景面积开运算以获取第一前景去孤岛掩膜;
129.413:对第一前景去孤岛掩膜执行前景面积闭运算以获取去背景狭长区域掩膜;
130.414:对去背景狭长区域掩膜执行背景面积开运算以获取第二前景去空洞掩膜;
131.415:对第二前景去空洞掩膜执行背景面积闭运算以获取去前景狭长区域掩膜;
132.416:对去前景狭长区域掩膜执行背景面积闭运算以获取第二前景去孤岛掩膜;
133.417:在第二前景去孤岛掩膜中像素不存在异常时,将第二前景去孤岛掩膜作为前景掩膜;及
134.418:在第二前景去孤岛掩膜中像素存在异常时,循环执行前述获取第一前景去空洞掩膜至获取第二前景去孤岛掩膜的步骤,直至第二前景去孤岛掩膜中像素不存在异常,并将当前的第二前景去孤岛掩膜作为前景掩膜。
135.请结合图2,在某些实施方式中,处理器20还可用于实现步骤411、412、413、414、415、416、417、及418。即,处理器20还可以用于:对分割图像执行背景面积开运算以获取第一前景去空洞掩膜;对第一前景去空洞掩膜执行前景面积开运算以获取第一前景去孤岛掩膜;对第一前景去孤岛掩膜执行前景面积闭运算以获取去背景狭长区域掩膜;对去背景狭长区域掩膜执行背景面积开运算以获取第二前景去空洞掩膜;对第二前景去空洞掩膜执行背景面积闭运算以获取去前景狭长区域掩膜;对去前景狭长区域掩膜执行背景面积闭运算以获取第二前景去孤岛掩膜;在第二前景去孤岛掩膜中像素不存在异常时,将第二前景去孤岛掩膜作为前景掩膜;在第二前景去孤岛掩膜中像素存在异常时,循环执行前述获取第一前景去空洞掩膜至获取第二前景去孤岛掩膜的步骤,直至第二前景去孤岛掩膜中像素不存在异常,并将当前的第二前景去孤岛掩膜作为前景掩膜。
136.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤411、412、413、414、415、416、417、及418。即,获取模块12还可以用于:对分割图像执行背景面积开运算以获取第一前景去空洞掩膜;对第一前景去空洞掩膜执行前景面积开运算以获取第一前景去孤岛掩膜;对第一前景去孤岛掩膜执行前景面积闭运算以获取去背景狭长区域掩膜;对去背景狭长区域掩膜执行背景面积开运算以获取第二前景去空洞掩膜;对第二前景去空洞掩膜执行背景面积闭运算以获取去前景狭长区域掩膜;对去前景狭长区域掩膜执行背景面积闭运算以获取第二前景去孤岛掩膜;在第二前景去孤岛掩膜中像素不存在异常时,将第二前景去孤岛掩膜作为前景掩膜;在第二前景去孤岛掩膜中像素存在异常时,循环执行前述获取第一前景去空洞掩膜至获取第二前景去孤岛掩膜的步骤,直至第二前景去孤岛掩膜中像素
不存在异常,并将当前的第二前景去孤岛掩膜作为前景掩膜。
137.对分割图像执行背景面积开运算,即先对背景面积进行腐蚀运算,使分割图像的背景面积的邻域缩减,即与背景面积相邻的前景面积缩减;再对背景面积进行膨胀运算,使分割图像的背景面积的邻域扩张,即与背景面积相邻的前景面积扩张。如此,最终扩张的前景面积能够将“空洞”区域填补,以去除分割图像的“空洞”区域,获取第一前景去空洞掩膜。
138.对第一前景去空洞掩膜执行前景面积开运算,即先对前景面积进行腐蚀运算,使分割图像的前景面积的邻域缩减,即与前景面积相邻的背景面积缩减;再对前景面积进行膨胀运算,使分割图像的前景面积的邻域扩张,即与前景面积相邻的背景面积扩张。如此,最终扩张的背景面积能够将“孤岛”区域覆盖,以去除第一前景去空洞掩膜的“孤岛”区域,获取第一前景去孤岛掩膜。
139.对第一前景去孤岛掩膜执行前景面积闭运算,即先对前景面积进行膨胀运算,使分割图像的前景面积的邻域扩张,即与前景面积相邻的背景面积扩张;再对前景面积进行腐蚀运算,使分割图像的前景面积的邻域缩减,即与前景面积相邻的背景面积缩减。如此,最终背景区域在前景区域形成的“狭长区域”所对应的背景面积将缩减,以实现去除第一前景去孤岛掩膜中背景的“狭长区域”,获取去背景狭长区域掩膜。
140.对去背景狭长区域掩膜执行背景面积开运算,以去除在获取去背景狭长区域掩膜的过程中可能出现的“空洞”区域,获取第二前景去空洞掩膜。
141.对第二前景去空洞掩膜执行背景面积闭运算,即先对背景面积进行膨胀运算,使分割图像的背景面积的邻域扩张,即与背景面积相邻的前景面积扩张;再对背景面积进行腐蚀运算,使分割图像的背景面积的邻域缩减,即与背景面积相邻的前景面积缩减。如此,最终前景区域在背景区域形成的“狭长区域”所对应的前景面积将缩减,以实现去除第二前景去空洞掩膜中前景的“狭长区域”,获取去去前景狭长区域掩膜。
142.对去前景狭长区域掩膜执行背景面积闭运算,以去除在获取去前景狭长区域掩膜的过程中可能出现的“孤岛”区域,获取第二前景去孤岛掩膜。
143.检测第二前景去孤岛掩膜是否存在异常像素。在第二前景去孤岛掩膜中像素不存在异常时,将第二前景去孤岛掩膜作为前景掩膜;在第二前景去孤岛掩膜中像素存在异常时,循环执行前述获取第一前景去空洞掩膜至获取第二前景去孤岛掩膜的步骤,直至第二前景去孤岛掩膜中像素不存在异常,并将当前的第二前景去孤岛掩膜作为前景掩膜。其中,异常像素指导致前景轮廓边界获取异常或失败的像素。
144.具体地,请参阅图18,图18是一个“孤岛”区域存在的异常像素d1的示意图。异常像素d1是一个前景像素,异常像素d1的邻域像素均为背景像素db,使异常像素d1形成背景像素中的一个“孤岛”。获取前景轮廓边界即为获取前景像素与背景像素的边界的过程,当存在一个或多个如异常像素d1的前景像素在背景像素中形成的“孤岛”时,在获取前景轮廓边界时,会导致前景轮廓边界的识别始终在异常像素d1的周围循环,无法完成对其余区域的边界识别,从而导致前景轮廓边界获取异常或失败。
145.请参阅图19,图19是又一个“空洞”区域存在的异常像素d2的示意图。异常像素d2是一个背景像素,异常像素d2的邻域像素均为前景像素df,使异常像素d2形成前景像素中的一个“空洞”。当存在一个或多个如异常像素d2的背景像素在前景像素中形成的“空洞”时,在获取前景轮廓边界时,会导致前景轮廓边界的识别始终在异常像素d2的周围循环,无
法完成对其余区域的边界识别,从而导致前景轮廓边界获取异常或失败。
146.请参阅图20,图20是有一个“狭长区域”存在的异常像素d3的示意图。异常像素d3可以是一个前景像素或背景像素,取决于异常像素d3处在的“狭长区域”是狭长的背景区域还是狭长的前景区域。以狭长的前景区域为例,异常像素d3连接前景的区块u1和前景的区块u2。作为一个示例,在进行前景轮廓边界识别时,轮廓边界识别的路径本应该沿路径l1进行,以完成对区块u1的轮廓边界的识别,再完成对区块u2的轮廓边界的识别;或者沿图未示出的路径先完成对区块u2的轮廓边界的识别,再完成对区块u1的轮廓边界的识别。然而,由于区块u1和区块u2之间存在异常像素d3,因此在进行前景轮廓边界识别时,轮廓边界识别的路径可能沿路径l2进行,导致区块u1在图中的下半部的轮廓点不会被识别到,从而导致前景轮廓边界获取异常或失败。
147.请结合图16至图20,在一个实施例中,当获取第二前景去孤岛掩膜后,检测第二前景去孤岛掩膜中是否存在异常像素,例如图18至图20示意的异常像素d1、异常像素d2、或异常像素d3。在第二前景去孤岛掩膜中像素存在异常时,即检测到异常像素时,重复执行411、412、413、414、415、416、417、及418,以获取新的第二前景去孤岛掩膜,直至新获取的第二前景去孤岛掩膜中像素不存在异常时,则将新获取的第二前景去孤岛掩膜作为前景掩膜。
148.需要说明的是,步骤041:对分割图像的前景和/或背景进行形态学面积运算以获取前景掩膜,具体的进行形态学面积运算不局限于依序执行步骤411、412、413、414、415、416、417、及418,还可以根据分割图像中异常像素的具体位置和数量按预定的执行顺序执行:背景面积开运算、背景面积闭运算、前景面积开运算、及前景面积闭运算中的一种或多种,在此不一一列举。本技术的实施例中,依序执行步骤411、412、413、414、415、416、417、及418获取前景掩膜,能够对形态学面积运算的过程中新产生的“孤岛”、“空洞”、“狭长区域”等问题区域进行处理,以较少的步骤精确地消除异常像素,能够提高获取前景掩膜的效率,还能够确保前景轮廓边界能够被准确识别。
149.请参阅图21,在某些实施方式中,前景掩膜中的轮廓点是一组2行2列的相邻像素组成的像素矩阵的交叉点,即2行2列的相邻像素的公共交点。根据轮廓点邻域内2行2列的像素矩阵中各个像素的类型,可以将轮廓点分为不同类型的轮廓点。特别地,当轮廓点位于前景掩膜的图像与图像外界的边缘时,可将图像外界实际并不存在像素的落在轮廓点的邻域内的区域看做一个“空像素d0”。例如图21中示意的轮廓点be1的邻域内包括其邻域左上角和左下角的背景像素db,及邻域右上角和右下角的空像素d0。
150.具体地,若轮廓点的邻域内(2行2列的相邻像素,下同)仅包括背景像素db,则该轮廓点为bn型轮廓点。若轮廓点的邻域内仅包括前景像素df,则该轮廓点为fn型轮廓点。若轮廓点的邻域内仅包括背景像素db和空像素d0,则该轮廓点为be型轮廓点。若轮廓点的邻域内仅包括前景像素df和空像素d0,则该轮廓点为fe型轮廓点。若轮廓点的邻域内仅包括背景像素db和前景像素df,则该轮廓点为bf型轮廓点。若轮廓点的邻域内包括背景像素db、前景像素df、和空像素d0,则该轮廓点为bfe型轮廓点。
151.其中,可能作为前景轮廓边界的轮廓点包括fe型轮廓点、bf型轮廓点、及bfe型轮廓点,这三种类型的轮廓点称为有效前景轮廓点。从所有轮廓点中找出前景掩膜中前景部分的有效前景轮廓点后,还需要根据有效前景轮廓点确定前景轮廓边界。确定前景轮廓边界,即确定每个有效前景轮廓点的相邻关系。当每个有效前景轮廓点的相邻关系确定后,依
序访问相邻的每个有效前景轮廓点即可获取前景轮廓边界。
152.具体地,在一个实施例中,首先确定前景轮廓边界的访问起点及方向。例如,如图21所示,将轮廓点fe1作为访问起点,以逆时针方向作为访问方向。之后计算一个有效前景轮廓点与其余所有有效前景轮廓点之间的欧式距离,并将访问方向上与这个有效前景轮廓点的欧氏距离最近的另一有效前景轮廓点作为这个有效前景轮廓点的相邻有效前景轮廓点。例如,如图21所示,轮廓点fe1的相邻有效前景轮廓点为轮廓点fe2,轮廓点fe2的相邻有效前景轮廓点为轮廓点bfe1,轮廓点bfe1的相邻有效前景轮廓点为轮廓点bf1,接着依序访问bf2、bf3、bf4、bf5、bf6、bf7、bf8等,在此不一一列举。请结合图21及图22,依序访问相邻的每个有效前景轮廓点获取前景轮廓边界lf后,即可获取如图22示意的前景轮廓图p22。其中,在前景轮廓边界内的区域为前景区域。
153.请参阅图23及图24,在某些实施方式中,04:处理分割图像以获取前景轮廓图,还包括:
154.046:对前景轮廓边界上的有效前景轮廓点进行降采样处理。
155.045:根据前景轮廓边界形成前景轮廓图,包括:
156.451:根据降采样处理后的前景轮廓边界形成前景轮廓图。
157.请结合图2,在某些实施方式中,处理器20还可用于实现步骤046及451。即,处理器20还可以用于:对前景轮廓边界上的有效前景轮廓点进行降采样处理;及根据降采样处理后的前景轮廓边界形成前景轮廓图。
158.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤046及451。即,获取模块12还可以用于:对前景轮廓边界上的有效前景轮廓点进行降采样处理;及根据降采样处理后的前景轮廓边界形成前景轮廓图。
159.请参阅图22,对前景轮廓边界lf上的有效前景轮廓点(图中以bf型轮廓点为例)进行降采样处理,能够减少前景轮廓边界上有效前景轮廓点的数量,以在根据前景轮廓图获取三维模型时减少数据处理量。
160.具体地,在前景轮廓边界已知的条件下,减少前景轮廓边界上的有效前景轮廓点的数量并不会改变前景轮廓边界,且能够在建立三维模型时减少数据处理量,提高建模效率。在一个实施例中,以预设的步长对前景轮廓边界上的有效前景轮廓点进行降采样处理,以使降采样处理后前景轮廓边界上的有效前景轮廓点之间的间隔均匀。例如,预设的步长为2,则每间隔2个有效前景轮廓点就去掉1个(第3个)有效前景轮廓点。预设的步长还可以是1、3、4、5、或更多,在此不一一列举。降采样的方式也不局限于按预设的步长去除有效前景轮廓点,在此不作限制。
161.请参阅图16及图25,在某些实施方式中,04:处理分割图像以获取背景轮廓图,包括:
162.047:根据分割图像及背景的色彩信息获取原始掩膜;
163.048:对原始掩膜的前景和/或背景进行形态学面积运算以获取背景掩膜;
164.049:获取背景掩膜中的所有轮廓点;
165.0410:从所有轮廓点中找出背景掩膜中背景部分的有效背景轮廓点;
166.0411:根据每个有效背景轮廓点与其他有效背景轮廓点之间的距离及预设的访问方向获取背景轮廓边界;及
167.0412:根据背景轮廓边界形成背景轮廓图。
168.请结合图2,在某些实施方式中,处理器20还可用于实现步骤047、048、049、0410、0411及0412。即,处理器20还可以用于:根据分割图像及背景的色彩信息获取原始掩膜;对原始掩膜的前景和/或背景进行形态学面积运算以获取背景掩膜;获取背景掩膜中的所有轮廓点;从所有轮廓点中找出背景掩膜中背景部分的有效背景轮廓点;根据每个有效背景轮廓点与其他有效背景轮廓点之间的距离及预设的访问方向获取背景轮廓边界;及根据背景轮廓边界形成背景轮廓图。
169.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤047、048、049、0410、0411及0412。即,获取模块12还可以用于:根据分割图像及背景的色彩信息获取原始掩膜;对原始掩膜的前景和/或背景进行形态学面积运算以获取背景掩膜;获取背景掩膜中的所有轮廓点;从所有轮廓点中找出背景掩膜中背景部分的有效背景轮廓点;根据每个有效背景轮廓点与其他有效背景轮廓点之间的距离及预设的访问方向获取背景轮廓边界;及根据背景轮廓边界形成背景轮廓图。
170.其中,处理分割图像以获取背景轮廓图的步骤048、049、0410、0411及0412与处理分割图像以获取前景轮廓图的步骤041、042、043、044及045类似。具体地,步骤048中获取背景掩膜的方法与步骤041中获取前景掩膜的方法类似。步骤049中获取背景掩膜中的所有轮廓点的方法与步骤042中获取前景中的所有轮廓点的方法类似。步骤0410中找出有效背景轮廓点的方法与步骤043中找出有效前景轮廓点的方法类似,请结合图21,其中,背景掩膜中轮廓点的类型包括bn型轮廓点、、fn型轮廓点、be型轮廓点、fe型轮廓点、bf型轮廓点及bfe型轮廓点。其中,能够作为有效背景轮廓点的类型包括be型轮廓点、bf型轮廓点、及bfe型轮廓点。步骤0411中获取背景轮廓边界的方法与步骤044中获取前景轮廓边界的方法类似。步骤0412中形成背景轮廓图的方法与步骤045中形成前景轮廓图的方法类似。上述类似的方法在此不再赘述。
171.请结合图26,步骤047:根据分割图像及背景的色彩信息获取原始掩膜,具体地,在对背景图进行色彩补全之后,色彩补全后的背景区域相对于分割图像中的背景区域有所扩张,在获取背景轮廓图时的背景区域应当以扩张后的背景区域为基准。在一个实施例中,分割图像p1为二值化图像,下面以黑色为分割图像p1中的背景,白色为分割图像p1中的前景为例进行说明。根据背景的色彩信息可以确定色彩补全之后的新背景区域s1’,根据新背景区域s1’填充分割图像p1中的黑色的区域,使分割图像p1中黑色的区域范围与新背景区域s1’相同,即可获取原始掩膜p26。
172.在某些实施方式中,因为根据背景的色彩信息对背景图进行色彩补全之后的新背景区域与根据背景的深度信息对背景图进行深度补全之后的新背景区域相同,因此还可根据分割图像及背景的深度信息获取原始掩膜,方法与步骤047的方法类似,此处不再赘述。
173.请参阅图23、图24、图27、及图28,在某些实施方式中,04:处理分割图像以获取背景轮廓图,还包括:
174.0413:对背景轮廓边界上的有效背景轮廓点进行降采样处理。
175.0412:根据背景轮廓边界形成背景轮廓图,包括:
176.4121:根据降采样处理后的背景轮廓边界形成背景轮廓图。
177.请结合图2,在某些实施方式中,处理器20还可用于实现步骤0413及4121。即,处理
器20还可以用于:对背景轮廓边界上的有效背景轮廓点进行降采样处理;及根据降采样处理后的背景轮廓边界形成背景轮廓图。
178.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤0413及4121。即,获取模块12还可以用于:对背景轮廓边界上的有效背景轮廓点进行降采样处理;及根据降采样处理后的背景轮廓边界形成背景轮廓图。
179.其中,步骤0413中的降采样处理方法与步骤046中的降采样处理方法类似。步骤4121中形成背景轮廓图的方法与步骤451中形成前景轮廓图的方法类似。类似的步骤和方法此处不再赘述。
180.请参阅图17及图29,048:对原始掩膜的前景和/或背景进行形态学面积运算以获取背景掩膜,包括:
181.481:对原始掩膜执行前景面积开运算以获取第一背景去空洞掩膜;
182.482:对第一背景去空洞掩膜执行背景面积开运算以获取第一背景去孤岛掩膜;
183.483:对第一背景去孤岛掩膜执行前景面积闭运算以获取去前景狭长区域掩膜;
184.484:对前景狭长区域掩膜执行背景面积开运算以获取第二背景去空洞掩膜;
185.485:对第二背景去空洞掩膜执行背景面积闭运算以获取去背景狭长区域掩膜;
186.486:对去背景狭长区域掩膜执行背景面积闭运算以获取第二背景去孤岛掩膜;
187.487:在第二背景去孤岛掩膜中像素不存在异常时,将第二背景去孤岛掩膜作为背景掩膜;
188.488:在第二背景去孤岛掩膜中像素存在异常时,循环执行前述获取第一背景去空洞掩膜至获取第二背景去孤岛掩膜的步骤,直至第二背景去孤岛掩膜中像素不存在异常,并将当前的第二背景去孤岛掩膜作为背景掩膜。
189.请结合图2,在某些实施方式中,处理器20还可用于实现步骤481、482、483、484、485、486、487、及488。即,处理器20还可以用于:对原始掩膜执行前景面积开运算以获取第一背景去空洞掩膜;对第一背景去空洞掩膜执行背景面积开运算以获取第一背景去孤岛掩膜;对第一背景去孤岛掩膜执行前景面积闭运算以获取去前景狭长区域掩膜;对前景狭长区域掩膜执行背景面积开运算以获取第二背景去空洞掩膜;对第二背景去空洞掩膜执行背景面积闭运算以获取去背景狭长区域掩膜;对去背景狭长区域掩膜执行背景面积闭运算以获取第二背景去孤岛掩膜;在第二背景去孤岛掩膜中像素不存在异常时,将第二背景去孤岛掩膜作为背景掩膜;在第二背景去孤岛掩膜中像素存在异常时,循环执行前述获取第一背景去空洞掩膜至获取第二背景去孤岛掩膜的步骤,直至第二背景去孤岛掩膜中像素不存在异常,并将当前的第二背景去孤岛掩膜作为背景掩膜。
190.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤481、482、483、484、485、486、487、及488。即,获取模块12还可以用于:对原始掩膜执行前景面积开运算以获取第一背景去空洞掩膜;对第一背景去空洞掩膜执行背景面积开运算以获取第一背景去孤岛掩膜;对第一背景去孤岛掩膜执行前景面积闭运算以获取去前景狭长区域掩膜;对前景狭长区域掩膜执行背景面积开运算以获取第二背景去空洞掩膜;对第二背景去空洞掩膜执行背景面积闭运算以获取去背景狭长区域掩膜;对去背景狭长区域掩膜执行背景面积闭运算以获取第二背景去孤岛掩膜;在第二背景去孤岛掩膜中像素不存在异常时,将第二背景去孤岛掩膜作为背景掩膜;在第二背景去孤岛掩膜中像素存在异常时,循环执行前述获取第
一背景去空洞掩膜至获取第二背景去孤岛掩膜的步骤,直至第二背景去孤岛掩膜中像素不存在异常,并将当前的第二背景去孤岛掩膜作为背景掩膜。
191.根据原始掩膜获取背景掩膜的步骤481、482、483、484、485、486、487、及488,与根据分割图像获取前景掩膜的步骤411、412、413、414、415、416、417、及418类似,此处不再赘述。需要说明的是,在根据分割图像获取前景掩膜的步骤中,“孤岛”是前景像素相对背景像素而言,即前景像素被背景像素包围;“空洞”是背景像素相对前景像素而言,即背景像素被前景像素包围。而在根据原始掩膜获取背景掩膜的步骤中,“孤岛”是背景像素相对前景像素而言,即背景像素被前景像素包围;“空洞”是前景像素相对背景像素而言,即前景像素被背景像素包围。
192.在某些实施方式中,在根据原始掩膜获取背景掩膜时的“孤岛”和“空洞”的概念分别与根据分割图像获取前景掩膜的“孤岛”和“空洞”的概念相同,即背景掩膜和前景掩膜的“孤岛”均是指前景像素被背景像素包围,背景掩膜和前景掩膜的“空洞”均是指背景像素被前景像素包围。则可以根据步骤411、412、413、414、415、416、417、及418的方法由原始掩膜获取背景掩膜。具体地,可对原始掩膜依次执行背景面积开运算、前景面积开运算、前景面积闭运算、背景面积开运算、背景面积闭运算、及背景面积闭运算以获取第二背景去孤岛掩膜,在第二背景去孤岛掩膜中像素不存在异常时,将第二背景去孤岛掩膜作为背景掩膜;在第二背景去孤岛掩膜中像素存在异常时,循环执行前述步骤,直至第二背景去孤岛掩膜中像素不存在异常,并将当前的第二背景去孤岛掩膜作为背景掩膜。
193.获取到的前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩信息、及背景的深度信息可用于获取三维模型。在某些实施方式中,三维模型包括前景模型和背景模型。请结合图30,05:根据前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩信息、及背景的深度信息获取三维模型,包括:
194.051:根据前景轮廓图、前景的色彩信息、及前景的深度信息获取前景模型;及
195.052:根据背景轮廓图、背景的色彩信息、及背景的深度信息获取背景模型。
196.请结合图2,在某些实施方式中,处理器20还可用于实现步骤051及052。即,处理器20还可以用于:根据前景轮廓图、前景的色彩信息、前景的深度信息获取前景模型;及根据背景轮廓图、背景的色彩信息、及背景的深度信息获取背景模型。
197.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤051及052。即,获取模块12还可以用于:根据前景轮廓图、前景的色彩信息、前景的深度信息获取前景模型;及根据背景轮廓图、背景的色彩信息、及背景的深度信息获取背景模型。
198.具体地,请参阅图31,在某些实施方式中,051:根据前景轮廓图、前景的色彩信息、前景的深度信息获取前景模型,包括:
199.511:获取前景轮廓图的前景填充区;
200.512:在前景填充区添加前景点阵,合并前景点阵和前景轮廓图中的前景有效轮廓点以获取前景顶点;
201.513:对前景顶点做三角剖分处理获取前景三角网格;
202.514:根据前景三角网格及前景的深度信息获取前景三维网格;及
203.515:根据前景的色彩信息对前景三维网格着色,以获取前景模型。
204.请结合图2,在某些实施方式中,处理器20还可用于实现步骤511、512、513、514、及
515。即,处理器20还可以用于:获取前景轮廓图的前景填充区;在前景填充区添加前景点阵,合并前景点阵和前景轮廓图中的前景有效轮廓点以获取前景顶点;对前景顶点做三角剖分处理获取前景三角网格;根据前景三角网格及前景的深度信息获取前景三维网格;及根据前景的色彩信息对前景三维网格着色,以获取前景模型。
205.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤511、512、513、514、及515。即,获取模块12还可以用于:获取前景轮廓图的前景填充区;在前景填充区添加前景点阵,合并前景点阵和前景轮廓图中的前景有效轮廓点以获取前景顶点;对前景顶点做三角剖分处理获取前景三角网格;根据前景三角网格及前景的深度信息获取前景三维网格;及根据前景的色彩信息对前景三维网格着色,以获取前景模型。
206.请参阅图32,在某些实施方式中,前景轮廓图p32中的前景轮廓lf仅包括外轮廓,则前景填充区为外轮廓lf包裹的区域。请参阅图22,在某些实施方式中,前景轮廓图中的前景轮廓lf包括外轮廓lf1和内轮廓lf2,则前景填充区是外轮廓lf1包裹的区域sf1减除内轮廓lf2包裹的区域sf2后余下的区域。
207.请参阅图22及图33,在前景轮廓图p32的前景填充区(前景轮廓lf包围的区域)添加前景点阵后获取的前景点阵图p331中包括多个前景有效轮廓点(图中以bf型轮廓点为例)及多个前景点阵中的点rf,前景有效轮廓点及前景点阵中的各个点rf用于建立三角网格。具体地,三角网格是多个三角形组成的网格,即每个网格的轮廓为三角形。其中,前景点阵中的每个点rf以及前景轮廓边界上的每个前景有效轮廓点作为三角网格中三角形的顶点,即前景顶点。图33中的三角网格图p332示意了四个前景点阵中的点rf作为顶点生成的两个三角形网格tf的放大图。
208.在一个实施例中,可按照预设的三角剖分规则对每个前景顶点做三角剖分处理,以建立三角网格。其中,预设的三角剖分规则可包括基本三角剖分法、德劳内三角剖分法、正则三角剖分法、或约束三角剖分法等,在此不一一列举。
209.在某些实施方式中,在前景填充区添加的前景点阵中点的疏密程度与前景轮廓边界上的前景有效轮廓点的疏密程度一致,以使每个网格的分布均匀。
210.在某些实施方式中,由二维的前景三角网格获取前景三维网格,需要计算出三角网格中每个前景顶点在三维空间中对应的坐标。在一个实施例中,可将前景三角网格与前景的深度信息匹配,以获取每个前景顶点的深度值。可根据相机的内参矩阵把每个前景顶点的二维坐标投影到三维空间,并结合每个前景顶点的深度值获取每个前景顶点在三维空间中对应的坐标。其中,相机的内参矩阵可以是采集待处理图像相机的内参矩阵,也可以是预设的一个内参矩阵,在此不作限制。
211.请参阅图34,获取三角网格中每个前景顶点在三维空间中对应的坐标后,可将三角网格转化为三维网格,三维网格相当于一个未着色的三维模型。在一个实施例中,可将前景三角网格与前景的色彩信息匹配,以确定每个三角网格对应的色彩值。可根据每个三角网格对应的色彩值,对每个三角网格在前景三维网格中对应的网格着色,以获取前景模型。以三角网格tf1和三角网格tf2为例,构成三角网格tf1和三角网格tf2的四个顶点在三角网格图p332中的坐标分别为df1、df2、df3、及df4。顶点df1、df2、df3、及df4在三维空间中对应的坐标分别为df1’、df2’、df3’、及df4’。根据三维空间坐标df1’、df2’、df3’、及df4’可以确定三角网格tf1和三角网格tf2在三维空间中对应的三维网格tf1’和三维网格tf2’。根据三
角网格tf1对应的色彩值对三维网格tf1’着色能够获取着色后的三维网格tf1”。根据三角网格tf2对应的色彩值对三维网格tf2’着色能够获取着色后的三维网格tf2”。前景模型则是根据每个类似三维网格tf1”的三维网格生成的三维模型。
212.对三维网格着色获取着色后的三维模型的方式,无需精确到对三维模型中每个像素进行着色渲染,可以通过对每个三维网格进行纹理贴图实现三维模型的着色,能够减少生成三维模型的数据处理量,提高生成前景模型的效率。
213.请结合图33至图34,其中,前景顶点的数量越丰富,则三维网格能够还原的前景的深度信息越丰富,前景模型越接近真实的三维前景。前景顶点之间的间隔越大,则每个三角网格的面积越大,对应的三维网格面积也越大;单个三维网格面积越大,根据三维网格生成前景模型的处理速度越快,处理过程中的缓存文件越小,且生成的前景模型的文件大小也越小。
214.请参阅图35,在某些实施方式中,052:根据背景轮廓图、背景的色彩信息、及背景的深度信息获取背景模型,包括:
215.521:获取背景轮廓的背景填充区;
216.522:在背景填充区添加背景点阵,合并背景点阵和背景轮廓图中的背景有效轮廓点以获取背景顶点;
217.523:对背景顶点做三角剖分处理获取背景三角网格;
218.524:根据背景三角网格及背景的深度信息获取背景三维网格;及
219.525:根据背景的色彩信息对背景三维网格着色,以获取背景模型。
220.请结合图2,在某些实施方式中,处理器20还可用于实现步骤521、522、523、524、及525。即,处理器20还可以用于:获取背景轮廓的背景填充区;在背景填充区添加背景点阵,合并背景点阵和背景轮廓图中的背景有效轮廓点以获取背景顶点;对背景顶点做三角剖分处理获取背景三角网格;根据背景三角网格及背景的深度信息获取背景三维网格;及根据背景的色彩信息对背景三维网格着色,以获取背景模型。
221.请结合图3,在某些实施方式中,获取模块12还可用于实现步骤521、522、523、524、及525。即,获取模块12还可以用于:获取背景轮廓的背景填充区;在背景填充区添加背景点阵,合并背景点阵和背景轮廓图中的背景有效轮廓点以获取背景顶点;对背景顶点做三角剖分处理获取背景三角网格;根据背景三角网格及背景的深度信息获取背景三维网格;及根据背景的色彩信息对背景三维网格着色,以获取背景模型。
222.请结合图31至图34,步骤052获取背景模型的方法与步骤051获取前景模型的方法类似。步骤521获取背景填充区的方法与步骤511获取前景填充区的方法类似。步骤521获取背景顶点的方法与步骤512获取前景顶点的方法类似。步骤523获取背景三角网格的方法与步骤513获取前景三角网格的方法类似。步骤524获取背景三维网格的方法与步骤514获取前景三维网格的方法类似。步骤525获取背景模型的方法与步骤515获取前景模型的方法类似。类似的方法和步骤此处不在赘述。
223.请参阅图1,06:渲染三维模型以获取3d照片,具体地,在某些实施方式中,可根据前景深度信息确定前景模型在三维空间中的位置,及根据背景深度信息确定背景模型在三维空间中的位置,以预设的渲染视角渲染包括前景模型和背景模型的三维模型以获取一帧渲染图像。以类似的方法,改变渲染视角渲染多帧渲染图像,根据多帧渲染图像生成3d照
片,3d照片具有各帧渲染图像的视角。
224.具体地,请参阅图36及图37,在一个实施例中,待处理图像如p360所示,待处理图像p360包括前景f0和背景b0。根据处理图像p360可获取背景图p361,对背景图p361做色彩补全处理后可获取色彩补全后的背景图p362,背景图p362中包括色彩补全后的背景b0c。可见背景图p362中补全了被前景f0遮挡的数字“3”和数字“4”,但仍存在部分区域(背景图p362中的白色区域)的色彩没有补全。根据背景图p362可获取背景b0c的色彩信息。
225.三维模型k包括前景f0对应的前景模型k
f
及色彩补全后的背景b0c对应的背景模型k
b
。结合前文所述的3d照片的生成方法,在色彩补全后的背景图p362(即背景b0c的色彩信息)的基础上结合背景b0c的深度信息及背景b0c的轮廓图可以获取背景模型k
b
。根据前景f0的色彩信息、深度信息、及前景f0的轮廓图可以获取前景模型k
f
。
226.请参阅图37,在一个实施例中,在第一渲染视角q1、第二渲染视角q2、及第三渲染视角q3处渲染三维模型k,分别获取第一渲染图像p371、第二渲染图像p372、及第三渲染图像p373。其中,在第一渲染图像p371中能看见完整的数字“3”;在第二渲染图像p372中数字“3”和数字“4”均有一部分被前景f0遮挡;在第三渲染图像p373中能看见完整的数字“4”。可根据类似的方法获取第一渲染视角q1、第二渲染视角q2、及第三渲染视角q3之间的多个视角对应的多帧渲染图像,并将包括第一渲染图像p371、第二渲染图像p372、及第三渲染图像p373在内的多帧渲染图像生成一张3d照片。在一个实施例中,当用户在手机上查看这张3d照片时,在初始时刻展示第二渲染图像p372;在初始时刻,当用户自左向右滑动手机屏幕时,手机屏幕展示的图像由第二渲染图像p2逐渐过渡到第一渲染图像p1,即模拟由第二渲染视角q2沿第一方向x1逐渐过渡到第一渲染视角q1观察模型k的过程。类似地,当用户自右向左滑动手机屏幕时,手机屏幕展示渲染视角沿第二方向x2变化时对应的一帧或多帧渲染图像。从而在用户滑动手机屏幕拖动3d照片时,给用户“3d”的观感。
227.每两个相邻的渲染视角之间的角度变化越小,即相邻两帧渲染图像之间对应的视角的变化越小,则生成的3d照片在视角变化时的变化越流畅,连续性越好。渲染图像对应的渲染视角越丰富,则生成的3d照片可变化的视角越丰富。本技术的实施方式中,基于三角网格构建的三维模型的文件大小较小,生成三维模型的效率高,能够便于快速地渲染生成大量的不同视角的文件大小较小的渲染图像,能够在确保生成的3d照片在视角变化时的变化流畅、连续性好、且可变化视角丰富的前提下快速获取3d照片,以减少用户等待生成3d照片的等待时间。
228.在一个实施例中,用户可在终端100实时预览待处理图像对应的三维模型建模效果,并能够自定义三维模型的渲染视角,以使生成的3d照片的可变视角符合用户的预期。
229.综上,本技术实施方式的3d照片的生成方法、3d照片的生成装置10、及终端100仅需根据一张二维的待处理图像即可建立三维模型并生成3d照片。本技术实施方式的3d照片的生成方法中,利用前景轮廓图及背景轮廓图能够高效率地区分前景和背景并快速构建三维模型,利用前景/背景的轮廓图、色彩信息、和深度信息构建三维模型,数据处理量小,处理复杂度低,能够减少生成3d照片的过程中的报错;且最终生成3d照片的效率较高,3d照片的文件大小较小,能够便于用户实时地预览、分享、应用3d照片。
230.请参阅图38,本技术实施方式的一个或多个包含计算机程序301的非易失性计算机可读存储介质300,当计算机程序301被一个或多个处理器20执行时,使得处理器20可执
行上述任一实施方式的3d照片的生成方法,例如实现步骤01、02、03、04、05、06、07、08、09、010、021、031、022、023、024、032、033、034、035、041、042、043、044、045、441、412、413、414、415、416、417、418、046、451、047、048、049、0410、0411、0412、481、482、483、484、485、486、487、488、051、052、511、512、513、514、515、521、522、523、524及525中的一项或多项步骤。
231.例如,当计算机程序301被一个或多个处理器20执行时,使得处理器20执行以下步骤:
232.01:分割二维的待处理图像的前景和背景以获取分割图像;
233.02:获取待处理图像中前景的色彩信息和背景的色彩信息;
234.03:获取待处理图像中前景的深度信息和背景的深度信息;
235.04:处理分割图像以获取前景轮廓图及背景轮廓图,前景轮廓图包含前景的轮廓,背景轮廓图包含背景的轮廓;
236.05:根据前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩信息、及背景的深度信息获取三维模型;及
237.06:渲染三维模型以获取3d照片。
238.再例如,在计算机程序301被一个或多个处理器20执行时,使得处理器20执行以下步骤:
239.07:检测二维图像中的人像和人像的数量;
240.08:当人像的数量为一个时,获取人像的人体关键点,及获取人像在二维图像中的姿态;
241.09:根据人体关键点检测人像是否为半身人像;
242.010:在人像为半身人像,且姿态满足预设条件时,确定二维图像为待处理图像。
243.01:分割二维的待处理图像的前景和背景以获取分割图像;
244.02:获取待处理图像中前景的色彩信息和背景的色彩信息;
245.03:获取待处理图像中前景的深度信息和背景的深度信息;
246.04:处理分割图像以获取前景轮廓图及背景轮廓图,前景轮廓图包含前景的轮廓,背景轮廓图包含背景的轮廓;
247.05:根据前景轮廓图、前景的色彩信息、前景的深度信息、背景轮廓图、背景的色彩信息、及背景的深度信息获取三维模型;及
248.06:渲染三维模型以获取3d照片。
249.在本说明书的描述中,参考术语“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本邻域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
250.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本技术的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺
序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本技术的实施例所属技术邻域的技术人员所理解。
251.尽管上面已经示出和描述了本技术的实施方式,可以理解的是,上述实施方式是示例性的,不能理解为对本技术的限制,本邻域的普通技术人员在本技术的范围内可以对上述实施方式进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。