1.本发明涉及自动检票机的技术领域,具体为基于计算机视觉技术的自动检票机。
背景技术:
2.城市轨道交通自动售检票系统自动检票机,可分为三杆式自动检票机、剪式门自动检票机、摆式门自动检票机等。三杆式自动门检票机无通行逻辑,传统的剪式门、摆式门自动检票机是采用基于16~24对对射型红外传感器与闸机通行逻辑的组合的乘客通行检测技术,传感器布局见图1,沿着乘客通行的长度方向划为5个区域,包括:区域1的检测区、区域2的监测区、区域3的安全区、区域4的监测区、区域5的退出区,其中区域4与区域5区联合为检票机算法的退出区。
3.其中区域1为用于乘客以及行李箱进入闸机通道内的探测;区域2的检测区用于识别乘客、行李以及小孩等;区域3的安全区用于保证乘客在通道内的安全通行以及实现一卡一人的正常通行;区域4的监测区用于乘客离开检票机的位置判定;区域5为退出区,用于判定乘客是否完成整个检票机的通行过程。
4.由于受到传感器布局的影响,自动检票机传统乘客通行检测技术存在以下不足:
5.(1)通行效率低:自动检票机机身长度无法缩短,约为1900mm~2000mm左右,导致通道过长,降低乘客通行效率,易造成通道拥堵;
6.(2)防尾随能力差:当2名乘客间距≤200mm时,会被判断成为1名乘客,导致产生乘客逃票行为,造成运营经济损失;
7.(3)大件行李检测不准确:当乘客携带大件行李时,行李会被判断成乘客,导致乘客进入区域4之后,扇门关闭,行李无法通过,造成通行异常;
8.(4)小童身高检测不准确:由于小童检测采用的为反射型传感器(传感器检测可靠度低,对黑色物体不敏感),且小童通行行为具有不确定性,导致无法精确识别小童,造成小童无法通行或者被夹。
技术实现要素:
9.针对上述问题,本发明提供了基于计算机视觉技术的自动检票机,其通过摄像头拍摄到的图像,经过图像识别算法的运算处理,结合检票机通行逻辑判断,从而检测乘客的通行,使得通行效率高、防尾随能力好、且检测准确人和物。
10.基于计算机视觉技术的自动检票机,其特征在于,其包括:
11.检票机本体,其内置有通行逻辑控制单元;
12.双目摄像头;
13.计算机视觉处理器;
14.所述检票机本体包括票务系统、阻挡机构;
15.所述双目摄像头位于所述检票机本体所对应的通道区域的正上方区域布置,所述双目摄像头的镜头朝向通道区域布置;
16.所述通道区域沿着乘客的通行方向划分为第一检测区、第二监测区、第三安全区、第四监测区、第五退出区;
17.所述双目摄像头将通道区域内拍摄到的图像传输到所述计算机视觉处理器,所述计算机视觉处理器数据连接至所述通行逻辑控制单元。
18.其进一步特征在于:
19.所述双目摄像头具体为rgb红外双目摄像头;
20.所述计算机视觉处理器运用三角形的测量原理,通过顶置的rgb红外双目摄像头拍摄的灰度图,再经过计算机处理器滤除所有不必要的信息,仅将计算得到的三维模型中的深度信息以不同的颜色来表示,经过深度图像计算和识别从而获得如下信息和数据:被识别物体的轮廓数据、被识别物体的三维尺寸数据、被识别物体的类别、被识别物体的运动趋势、多个被识别物体。
21.其更进一步特征在于:第一检测区用于乘客以及行李箱进入闸机通道内的探测;所述第二监测区用于识别乘客、行李以及小孩;所述第三安全区用于保证乘客在通道内的安全通行以及实现一卡一人的正常通行;所述第四监测区用于乘客离开检票机的位置判定;所述第五退出区用于判定乘客是否完成整个检票机的通行过程;
22.所述检票机本体设置有阻挡机构,所述通道区域为双目摄像头的覆盖区域、为虚拟区域,其对闸机长度无实际要求,闸机长度仅需满足轨道交通售检票系统运营功能;
23.计算机视觉处理器通过对乘客轮廓分析以及三位尺寸测量,可精确识别、定位乘客,两个乘客同时进入摄像头视域时,精确定位刷卡乘客,防止乘客尾随闯闸行为;
24.计算机视觉处理器通过对乘客轮廓分析以及三位尺寸测量、训练,识别被检测目标是人或物,通过计算机视觉处理器的视觉处理技术,乘客携带行李均被识别到,确保乘客、行李安全通过自动检票机;
25.计算机视觉处理器通过对乘客轮廓分析以及三位尺寸测量、训练,识别被检测目标是成人还是小童,小童的行为具有不确定性,小童被识别出来后,确保小童安全、顺利的通过自动检票机。
26.采用上述技术方案后,无需沿着闸机机身的长度方向排布若干红外传感器,通过在检票机本体所对应的通道区域的正上方区域布置双目摄像头,切实的双目摄像头的镜头朝向通道区域布置即可,在正常工作时,双目摄像头将拍摄到的通道区域的图像传输到计算机视觉处理器内,计算机视觉处理器运用三角形的测量原理,经过深度图像计算和识别从而获得在通道区域内通行的人或物的对应信息,进而将获取的信息反馈到通行逻辑控制单元,通信逻辑控制单元驱动数据操作票务系统和阻挡机构,是通过摄像头拍摄到的图像,经过图像识别算法的运算处理,结合检票机通行逻辑判断,从而检测乘客的通行,使得通行效率高、防尾随能力好、且检测准确人和物。
附图说明
27.图1为现有的自动检票机的分区设置示意图;
28.图2为本发明的结构示意框图;
29.图3为本发明自动检票机的分区布置示意图。
具体实施方式
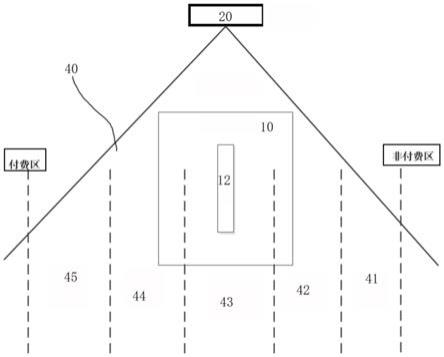
30.基于计算机视觉技术的自动检票机,见图2、图3,其包括检票机本体10、双目摄像头20、计算机视觉处理器30,检票机本体10内置有通行逻辑控制单元11;检票机本体10包括票务系统、阻挡机构12;
31.双目摄像头20位于检票机本体10所对应的通道区域40的正上方区域布置,双目摄像头20的镜头朝向通道区域40布置;
32.双目摄像头20将通道区域40内拍摄到的图像传输到计算机视觉处理器30,计算机视觉处理器30数据连接至通行逻辑控制单元11,通行逻辑控制单元11根据票务系统的反馈驱动阻挡机构12动作。
33.具体实施时,双目摄像头20具体为rgb红外双目摄像头;计算机视觉处理器30通过以太网连接通行逻辑控制单元11,
34.计算机视觉处理器30运用三角形的测量原理,通过顶置的rgb红外双目摄像头拍摄的灰度图,再经计算机处理器滤除所有不必要的信息,仅将计算得到的三维模型中的深度信息以不同的颜色来表示,经过深度图像计算和识别从而获得如下信息和数据:被识别物体的轮廓数据、被识别物体的三维尺寸数据、被识别物体的类别、被识别物体的运动趋势、多个被识别物体;
35.通道区域40沿着乘客的通行方向划分为第一检测区41、第二监测区42、第三安全区43、第四监测区44、第五退出区45;
36.第一检测区41用于乘客以及行李箱进入闸机通道内的探测;第二监测区42用于识别乘客、行李以及小孩;第三安全区43用于保证乘客在通道内的安全通行以及实现一卡一人的正常通行;第四监测区44用于乘客离开检票机的位置判定;第五退出区45用于判定乘客是否完成整个检票机的通行过程;
37.检票机本体10设置有阻挡机构,通道区域40为双目摄像头20的覆盖区域、为虚拟区域,其对闸机长度无实际要求,闸机长度仅需满足轨道交通售检票系统运营功能;
38.计算机视觉处理器30通过对乘客轮廓分析以及三位尺寸测量,可精确识别、定位乘客,两个乘客同时进入摄像头视域时,精确定位刷卡乘客,防止乘客尾随闯闸行为;
39.计算机视觉处理器30通过对乘客轮廓分析以及三位尺寸测量、训练,识别被检测目标是人或物,通过计算机视觉处理器的视觉处理技术,乘客携带行李均被识别到,确保乘客、行李安全通过自动检票机;
40.计算机视觉处理器30通过对乘客轮廓分析以及三位尺寸测量、训练,识别被检测目标是成人还是小童,小童的行为具有不确定性,小童被识别出来后,确保小童安全、顺利的通过自动检票机。
41.具体实施时:针对剪式门自动检票机,检票机长度可以做到小于等于1400mm;针对摆式门自动检票机,检票机长度可以做到小于等于1600mm;通常车票读写器识别车票时平均时间为0.2s,乘客步行平均速度为1.5m/s,根据速度公式t=s/v,以摆式自动检票机为例,我们可以计算得到:
42.t(传统通行监测技术)=0.2 2/1.5=1.53s.
43.t(计算机视觉技术的乘客通行检测技术)=0.2 1.6/1.5=1.27s.
44.由此我们可以获知,使用基于计算机视觉技术的乘客通行检测技术来检测乘客通
行,我们理论上至少可以提升(1
‑
1.27/1.53)*100%=17%的通行效率;
45.当两个乘客同时进入摄像头视域时,精确定位刷卡乘客,有效防止乘客尾随闯闸行为。通过原型机的实际试验数据,乘客尾随监测距离小于等于100mm,通过计算机视觉技术的自我学习以及训练,可将乘客尾随监测距离变得更小;
46.通过使用基于计算机视觉技术的乘客通行检测技术,最优方案为将检票机所对应的通行通道做成虚拟化的通道,实现无感通行。
47.其工作原理如下:无需沿着闸机机身的长度方向排布若干红外传感器,通过在检票机本体所对应的通道区域的正上方区域布置双目摄像头,切实的双目摄像头的镜头朝向通道区域布置即可,在正常工作时,双目摄像头将拍摄到的通道区域的图像传输到计算机视觉处理器内,计算机视觉处理器运用三角形的测量原理,经过深度图像计算和识别从而获得在通道区域内通行的人或物的对应信息,进而将获取的信息反馈到通行逻辑控制单元,通信逻辑控制单元驱动数据操作票务系统和阻挡机构,是通过摄像头拍摄到的图像,经过图像识别算法的运算处理,结合检票机通行逻辑判断,从而检测乘客的通行,使得通行效率高、防尾随能力好、且检测准确人和物。
48.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
49.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。