1.本发明涉及一种无人机技术,特别涉及一种无人机自主着陆移动平台的方法及系统。
背景技术:
2.在过去10年中,无人机的发展日趋成熟,因为无人机的快速迁移部署、灵活远程控制及可个性化定制,为连续飞行和特定任务的执行提供了有利的解决方案。无人机也成为工业、军事等领域的一种重要的辅助手段。然而在大多数情况下,无人机的飞行都是由“飞手”进行远程遥控辅助飞行,完成特定任务之后再手动控制返航或者通过一键自动返航等功能使得无人机返航到指定停放区域。由于无人机设计的个性化,不同的无人机有不同的飞行时长限制,无人机需要进行高频率的返航,由“飞手”手动更换电池继续完成特定任务。在这个无人机返航下降的过程中,都是由“飞手”进行辅助着陆,往往使得“飞手”的大多数时间花费在无人机的安全下降和跟换电池上。采用自动返航的功能进行无人机返航,常常由于gps和天气的变化导致无人机无法精准着地,导致无人机异常情况发生。
技术实现要素:
3.为了进一步提高无人机的利用率,提出了一种无人机自主着陆移动平台的方法及系统,降低管理和操作成本,同时实现无人机任务执行的自动化及其安全,将人工智能引入到无人机的自动化精准着陆上,在原有的gps的基础上,帮助无人机在移动的平台上进行快速精准着陆,通过无线充电的方式对无人机进行自动快速充电,实现无人机一机多用、快速迁移停放和能量补充,降低人力投入成本,无人机实现在移动平台安全、自主、精准的着陆。
4.本发明的技术方案为:一种无人机自主着陆移动平台的方法,无人机摄像头跟踪与之匹配的移动平台,实时获得移动平台与无人机的相对坐标信息,无人机根据相对坐标信息对自身飞行轨迹和速度进行自主调整,以此保持与移动平台为同一相对速度,在稳定的相对速度情况下,无人机进行移动平台上目标位置的自主着陆。
5.一种无人机自主着陆移动平台的系统,包括无人及跟踪单元、发送接收单元、远程监控单元和无人机移动停放单元;
6.无人机跟踪单元,用于对移动平台进行实时跟踪;
7.无人机移动停放单元,用于协助无人机安全停靠在移动平台上;
8.发送接收单元,用于将无人机实时状态信息发送给远程监控单元,同时接收远程监控单元的处理结论以及处理方案;
9.远程监控单元中的数据处理模块,用于对无人机的飞行数据分析和路径预测;无人机的飞行轨迹、gps导航路径、日志信息、工作任务信息数据,保存至远程存储模块上,数据处理模块进行集群处理,对无人机飞行数据进行分析,对无人机和移动平台路径进行预测;
10.远程监控单元中的数据存储模块,用于将无人机的飞行数据分析和路径预测的结
果进行存放。
11.优选的,所述无人机跟踪单元包括:移动目标跟踪模块、无人机自主变速模块、无人机高度获取模块、相对坐标计算模块、飞行轨迹预测模块和数据共享模块;
12.移动目标跟踪模块:通过计算机视觉信息处理技术,利用目标检测和目标跟踪技术,完成无人机高空飞行中的移动平台进行实时跟踪锁定;
13.无人机自主变速模块:通过获取目标移动平台的变化速度,调整自身速度和姿态,使得目标移动平台保持在无人机摄像头抓拍图像的中心,完成对移动平台的跟踪;
14.无人机高度获取模块:用于获取相对地面的高度,高空时利用气压传感器获取相对高度,低空时利用高精度的激光测距仪获取精准的低空飞行高度;
15.相对坐标计算模块:利用无人机的激光雷达技术,获取以无人机中心为原点、行驶移动平台在地面平面的相对距离和无人机的飞行高度构建的直角三角形,计算出移动平台和无人机两个世界坐标系的相对信息,用以无人机精准靠近移动平台;
16.飞行轨迹预测模块:利用无人机自身传感器、摄像头的视角图像、激光雷达和激光测距的获取的数据进行融合,预测出无人机飞行轨迹;
17.数据共享模块:无人机集群采集的数据、每架无人机在获取的信息和彼此距离目标平台相对位置都通过wifi进行共享,使得其他无人机共享数据经验和飞行轨迹。
18.优选的,所述无人机移动停放单元包括:停放区域图像实时获取模块、相对下降速度计算模块和成功停放信息报表发送模块;
19.停放区域图像实时获取模块:用于利用摄像头可自由调度,俯视抓拍停放区的图案,以此计算调整无人机的角度,实时纠正无人机下降轨迹;
20.相对下降速度计算模块:利用相机测距和高精度测距仪的数据综合运用,协同合作实时计算与移动平台的相对距离,使无人机平稳安全下降;
21.成功停放信息报表发送模块:将成功下降的移动平台的型号和在移动平台上的停放点相对坐标发送到远程监控单元,便于其他无人机规划此移动平台其他停放区域。
22.本发明的有益效果在于:本发明无人机自主着陆移动平台的方法及系统,通过人工智能技术辅助传统无人机安全下降,实时可视化整个无人机的状态,简化了工作人员的任务。无人机实现无定点停放功能,只跟随移动平台的移动停放,当多个无人机停发时,移动平台无需频繁停止去等待每个无人的安全降落,而是由无人机自主精准降落,赋予其无人智能决策的能力,使得无人机的任务更注重在企业的重要任务上,降低了人力维护和飞手的辅助,提高了业务工作效率和无人机飞行时长利用率。
附图说明
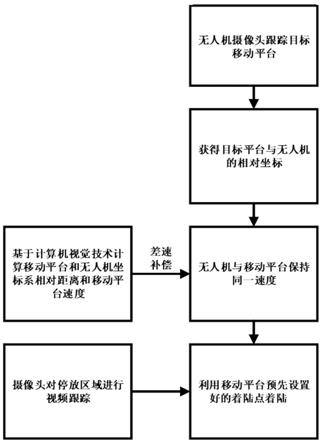
23.图1为本发明基于人工智能的无人机自主着陆移动平台的方法原理示意图;
24.图2为本发明基于人工智能的无人机自主着陆移动平台系统架构示意图。
具体实施方式
25.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
26.如图1所示基于人工智能的无人机自主着陆移动平台的方法原理示意图,旨在实现无人机平稳安全停放到指定区域。无人机摄像头跟踪与之匹配的移动平台,实时获得移动平台与无人机的相对坐标信息,无人机根据相对坐标信息对自身飞行轨迹和速度进行自主调整,以此保证与移动平台为同一相对速度,在稳定的相对速度情况下,无人机进行移动平台上目标位置的自主着陆。
27.如图2所述基于人工智能的无人机自主着陆移动平台系统架构示意图,系统包括无人及跟踪单元、发送接收单元、远程监控单元和无人机移动停放单元。
28.1、无人机跟踪单元,用于对移动平台进行实时跟踪;无人机跟踪单元多采用人工智能技术的目标跟踪、目标检测等方法,辅助飞行的无人机,获取移动平台的实时位置信息。例如,移动平台平移速度、移动平台在世界坐标系的坐标、移动平台行驶方向预测、无人机自身高度相对于移动平台的相对高度等状态信息。
29.2、无人机移动停放单元,用于协助无人机安全停靠在移动平台上。利用图像处理方法和多传感器参数融合,将无人机调整到和移动平台同步速度,并精准停放到移动平台的指定位置上,使得移动平台搭载着无人机安全行驶。
30.3、发送接收单元,用于将无人机实时状态信息发送给远程监控单元,同时接收远程监控单元的处理结论以及处理方案;发送接收单元可以为因特网网卡、gsm通信模块、5g通信模块等;无人机可以通过发送接收单元获取移动平台向监控中心实时发送和保存的行驶速度,如果移动平台行驶速度超过了无人机飞行的最大速度,无人机将向远程监控单元申请要求移动平台降速到无人机当前可跟踪范围速度进行低速行驶,使得无人机剩余的电量能满足当前无人机跟踪飞行和安全停放至移动平台的能量需要。发送接收单元还可以通过网络与用户手机通信连接,工作人员可以在手机或电脑上查看每个无人机完成任务的结果,例如当前的无人机所在的具体位置、已经采集到的数据、当前摄像头捕捉的画面和检测到图像和无人机精准停放的画面。如果单个无人机出现故障,发送接收单元将未完成任务分配给其他无人机,并向工作人员的手机发送营救短信。
31.4、数据处理模块,安装在远程监控单元中,用于对无人机的飞行数据分析和路径预测;无人机的飞行轨迹、gps导航路径、日志信息、工作任务信息等数据,将保存到远程存储模块上。利用数据处理模块进行集群处理,对无人机的未来路径进行预测;无人机根据移动平台跟踪轨迹对移动平台未来几秒的路径规划进行预测,选择合适的速度和姿态进行安全降落,避免在降落过程中遇见移动平台突然变向,导致飞行方向和移动平台行驶方向不一致,无人机预测数据送数据处理模块,数据处理模块将预测数据和降落方案数据结合进行分析。
32.5、数据存储模块,安装在远程监控单元,用于将无人机的飞行数据分析和预测的结果进行存放;有利于保存无人机的历史信息进行可视化显示,方便工作人员进行查看和分析无人机的工作状态,对无人机进行维护和改善,快速定位出现故障的无人机,预防风险。
33.本方案将数据处理模块和存储模块放置在远程监控单元,一方面可以实现数据共享,另一方面,设置在远程监控单元的数据处理模块和存储模块可以用于同时处理和存储多个无人机的读取的数据数据和画面,同时处理效率高,无需单独为每个无人机的一个高级的数据处理模块和存储模块,单个无人机的飞行经验可与其他无人机进行共享,服务器
集群进行计算处理,有利于提高效率,节约无人机设计成本和电量,提高可靠性。
34.实际应用中,无人机跟踪单元包括:
35.1、移动目标跟踪模块,通过计算机视觉信息处理技术,利用目标检测和目标跟踪技术,完成无人机高空飞行中的移动平台进行实时跟踪锁定。
36.2、无人机自主变速模块,通过获取目标移动平台的变化速度,调整自身速度和姿态,使得目标移动平台保持在无人机摄像头抓拍图像的中心,完成对移动平台的跟踪。
37.3、无人机高度获取模块,用于获取相对地面的高度,高空时利用气压传感器获取相对高度,低空时利用高精度的激光测距仪获取精准的低空飞行高度。
38.4、相对坐标计算模块,利用无人机的激光雷达技术,获取以无人机中心为原点、行驶移动平台在地面平面的相对距离和无人机的飞行高度构建的直角三角形,计算出移动平台和无人机两个世界坐标系的相对信息,用以无人机精准靠近移动平台。
39.5、飞行轨迹预测模块,利用无人机自身传感器、摄像头的视角图像、激光雷达和激光测距的获取的数据进行融合,预测出无人机飞行轨迹。
40.6、数据共享模块,无人机集群采集的数据、每架无人机在获取的信息和彼此距离目标平台相对位置都通过wifi进行共享,使得其他无人机共享数据经验和飞行轨迹。
41.实际应用中,无人机移动停放单元包括:
42.1、停放区域图像实时获取模块,由于无人机上的摄像头可以自由调度,当无人机飞行到移动平台上时,已经提前预测出移动平台在持续时间内无变向的行驶,此时无人机可以专心安全下降。利用摄像头俯视抓拍停放区的图案,利用图像手段计算调整无人机的角度,实时纠正无人机下降轨迹。
43.2、相对下降速度计算模块,利用相机测距和高精度测距仪的数据综合运用,协同合作实时计算与移动平台的相对距离,使无人机平稳安全下降。
44.3、成功停放信息报表发送模块,将成功下降的移动平台的型号和在移动平台上的停放点相对坐标发送到远程监控单元,方便其他无人机规划此移动平台其他停放区域。
45.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。