1.本发明涉及液压机故障诊断技术领域,尤其涉及一种基于智能系统的液压机故障诊断装置及方法。
背景技术:
2.贴面液压机广泛使用在人造板的生产中,是一种使用非常广泛的液压装置,其工作性能直接决定着产品质量,所以对液压机的维修与故障诊断有着非常重要的意义。对于液压机故障诊断,今年来采用采用智能化诊断技术可以减少液压故障的诊断时间,如基于emd包络谱分析的方法、采用petri网实现液压马达故障的诊断、基于故障树的专家系统推理机等。
3.专家系统可以将专家的维修思想用智能化语言实现,诊断时候,只需要查询专家系统,便可以得到比较满意的结果,专家系统可以不断的再学习和完善。目前已经有较多的专家系统得到成功应用。
4.因液压机液压故障复杂、类型多,存在较多的不确定性经验知识,知识库的规则不能完全表达和预先构建,限制了一些诊断方法的应用。
5.例如,一种在中国专利文献上公开的“液压机异地故障分析诊断系统”,其公告号:cn1548286a,其申请日:2004年11月24日,由信号采集、通讯网络、微处理器组成,液压机信号采集由信号传感器和控制器组成,通讯网络由通讯接口和公共通讯网络组成,微处理器安装有液压机远程故障分析诊断程序,液压机的信号传感器能将液压机的状态信号传递给控制器,控制器能将控制程序运行状况和液压机状态信号通过通讯接口经公共通讯网络传递给微处理器,微处理器运行故障分析诊断程序可进行异地液压机故障分析诊断。该申请的液压机故障分析系统没有对如何进行故障分析进行说明,无法达到液压机故障分析的目的。且现有技术的专家系统在推理机固定后无法增加知识模型,可扩展性较差,成本高且推理结果准确性低。
技术实现要素:
6.本发明主要解决现有的技术中液压机故障诊断系统可扩展性差且推理结果准确性低的问题;提供一种基于智能系统的液压机故障诊断装置及方法,在不改变推理机的前提下可随时增加知识模型,可扩展性强,节约成本,提高推理结果的准确性。
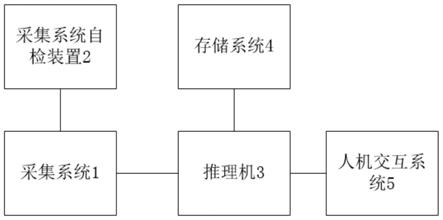
7.本发明的上述技术问题主要是通过下述技术方案得以解决的:一种基于智能系统的液压机故障诊断装置,包括采集系统、采集系统自检装置、专家系统和人机交互系统,所述专家系统包括推理机和存储系统,所述采集系统安装在液压机上,用于采集液压机的工作信号,所述采集系统与采集系统自检装置连接,所述采集系统自检装置与推理机连接,所述存储系统和人机交互系统均与推理机连接,所述存储系统存储有若干个知识模型,所述推理机结合采集的工作信号和存储系统的知识模型对液压系统进行故障分析,并通过人机交互系统将故障结果进行显示。通过采集系统对液压机的基础工作数据进行采集,通过采
集系统自检装置在某个传感器没有传递信息时判断是传感器故障还是液压机故障,增加推理结果的准确性,设置推理机和存储系统,在存储系统内存储知识模型,推理机通过调取存储系统内的知识模型进行液压机故障推理,使得推理机在固定的前提下还可以进行知识模型的变化和增加,大大增强了系统的可扩展性,有效节约成本。
8.作为优选,所述的采集系统自检装置包括第一电流信号采样探头k1、第二电流信号采样探头k2、与门逻辑电路and、三极管vt1、供电模块vcc和发光二极管led,所述第一电流信号采样探头k1采样传感器的电源端电流信号,所述第一电流信号采样探头k1和与门逻辑电路and的第一输入端连接,所述第二电流信号采样探头k2采样传感器输出端的电流信号,所述第二电流信号采样探头k2和与门逻辑电路and的第二输入端连接,所述与门逻辑电路and的输出端与三极管vt1的基极连接,所述三极管vt1的集电极与供电模块vcc连接,所述三极管vt1的发射极与发光二极管led的阳极连接,所述发光二极管led的阴极接地。当采集系统的传感器正常工作时,第一电流信号采样探头k1和第二电流信号采样探头k2均能采集到电流信号,三极管导通,发光二极管发亮,当传感器出现故障时,发光二极管不亮,通过直观的观察发光二极管的亮度可判断传感器的工作状态。
9.作为优选,所述的存储系统还存储有液压机模拟图形系统和知识库。液压机模拟图形系统通过节点和有向弧组成,可直观显示液压机各部位及其对应因子,有效减轻工作人员的工作负担,提高工作效率。
10.一种基于智能系统的液压机故障诊断方法,包括以下步骤:步骤s1:通过采集系统实时采集液压机工作信号;步骤s2:采集系统自检装置对采集系统故障和液压系统故障进行区别;步骤s3:推理机通过采集系统采集的信号和存储系统存储的知识模型进行故障推理;步骤s4:人机交互系统将推理机的推理结果进行显示。工作人员通过人机交互系统可方便的了解到液压机的故障问题以及故障所处的位置,使得后续的维修能更加顺利的进行。
11.作为优选,所述的存储系统存储的知识模型包括第一知识模型,所述第一知识模型的建立方法为:if{satusn
i
,satusflag,satusd
i
,{sf
ij
,sv
ij
,fd
ij
}}then{(satusn
i
,satusflagfin,{daqf
ij
,daqtheoryv
ij
,daqd
ij
})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,satusni表示第i个状态的编号,状态分为正常状态和故障状态,satusflag是一个标识,是专家系统识别这组数据的标识,也是这个模型的标识。satusdi为状态信息描述,包括状态的名称。sfij表示第i个状态的第j个特征名称,svij表示第i个状态的第j个特征的特征值,这里的值只有1或者0。fd为特征的文字描述,便于知识库的维护,satusflagfin是一个标识,是专家系统识别这组数据的标识。daqfij表示第i个状态的第j个采集数据的特征名称。daqtheoryvij表示第i个状态的第j个采集数据特征的特征理论值。实现了根据电磁阀动作逻辑,确定了当前的液压机的状态,并推导出了在这个状态下各个采集压力、流量等特征的理论特征值。
12.作为优选,所述的存储系统存储的知识模型还包括第二知识模型,所述第二知识模型的建立方法为:if{(satusn
i
,enablequflag)then{(satusn
i
,qucflagfin,{daqf
ij
,daqv
ij
,daqd
ij
})i=1,2,3,
…
,n;j=1,2,3
…
m};
其中,satusni表示第i个状态的编号,状态分为正常状态和故障状态,enablequflag是一个标识,是专家系统识别这组数据的标识,也是允许数据采集的标志。qucflagfin是采集结束到位后的标识。daqfij表示第i个状态的第j个采集数据的特征名称。daqvij表示第i个状态的第j个采集数据特征的特征实际值。实现了数据的采集。
13.作为优选,所述的存储系统存储的知识模型还包括第三知识模型,所述第三知识模型的建立方法为:if{satusn
i
,qucflagfin,satusflagfin}then{(satusn
i
,op_flagfin,{daqf
ij
,outv
ij
={(daqtheoryv
ij
,daqv
ij
),( ,-,*,/)})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,op_flagfin是标识。实现采样值与理论值的比较运算,并将运算结果存放到outv中。
14.作为优选,所述的存储系统存储的知识模型还包括第四知识模型,所述第四知识模型的建立方法为:if{satusn
i
,op_flagfin,satusflagfin}then{(satusn
i
,co_flagfin,{daqf
ij
,outresultv[k]
ij
=(outv
ij
,conferv
ij
),dff
ij
})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,co_flagfin是标识,通过该模型的运算后,凡是与标准误差的差值超过dffij的要求后,这些特征被记录到outresultv[k]ij中,其中,k表示层次,也就是说每采集一次数据就会计算一次。
[0015]
作为优选,所述的存储系统存储的知识模型还包括第五知识模型,所述第五知识模型的建立方法为:if{satusn
i
,co_flagfin,(daqf
ij
,outresultv[k]
ij
)}then{(satusn
i
,g_flagfin,daqf
ij
,outgv{k}
ij
)i=1,2,3,
…
,n;j=1,2,3
…
m};其中,g_flagfin表示图形推理完成的标识,通过该模型,也就是在co_flagfin运算结束后,根据运算结果outresultv[k]ij的情况,搜索知识库,就可以搜索出图形知识outgv{k}ij,outgv{k}ij是一个元组数据,由故障异常节点、有向线段、故障原因组成的知识事实。outgv{k}ij的表示方法为:outgv{k}={(errornode(n),line[],w(n),p(n)),(errornode(n),line[],w(n),p(n))
…
,(errornode(n),line[],w(n),p(n)),rensonroot}其中,errornode(n)表示第n个异常节点,line[ll]表示有向线段,用ll记录当前节点连接的下面一个节点的编号,w(n)表示当前节点与下面一个节点的连接权值,p(n)表示当前节点到下面一个节点发生概率,也就是当前节点发生后,导致下面一个节点发生的概率,rensonroot表示原因节点,也就是当前各节点发生异常后,最有可能产生故障的原因节点。
[0016]
作为优选,所述的推理机进行故障推理时,包括以下步骤:步骤s31:根据第三知识模型,将采集到的压力实际值与理论值进行比较;步骤s32:根据第四知识模型,将采集到的压力实际值与标准值进行误差运算,确定异常节点;步骤s33:根据异常节点数据,将异常节点通过液压机模拟图形系统进行图形显示,根据节点连接关系,在图形系统上显示有向线段,同时根据节点连接权值及概率进行计算,并对计算的概率进行排序,数值最大者即可确定故障原因,同时将故障节点与故障原因进行连接。通过几种模型进行推理,减少了测量点
的设计,有效节约成本,经过推理机的推理运算,将故障节点和故障原因通过液压机模拟图形系统进行直观显示,简单明了。
[0017]
本发明的有益效果是:(1)设置存储系统,在不改变推理机的基础下,可随时增加知识模型,可扩展性强;(2)设置液压机模拟图形系统,将推理机的推理结果进行直观明了的显示,提高工作人员的工作效率;(3)采取几种知识模型进行推理,减少了测量点的设计,节约成本。
附图说明
[0018]
图1是实施例一的故障诊断装置的连接框图。
[0019]
图2是实施例一的采集系统自检装置的电路原理图。
[0020]
图3是实施例一的故障诊断方法的流程框图。
[0021]
图4是实施例一的推理机推理过程的流程框图。
[0022]
图中1.采集系统,2.采集系统自检装置,3.推理机,4.存储系统,5.人机交互系统。
具体实施方式
[0023]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0024]
实施例一:一种基于智能系统的液压机故障诊断装置,如图1所示,包括采集系统1、采集系统自检装置2、推理机3、存储系统4和人机交互系统5,采集系统1安装在液压机上,用于采集液压机的工作信号,采集系统1与采集系统自检装置2连接,采集系统自检装置2与推理机3连接,存储系统4和人机交互系统5均与推理机3连接,存储系统4存储有若干个知识模型、液压机模拟图形系统和知识库,推理机3结合采集的工作信号和存储系统4的知识模型对液压系统进行故障分析,并通过人机交互系统5将故障结果进行显示。
[0025]
如图2所示,采集系统自检装置2包括第一电流信号采样探头k1、第二电流信号采样探头k2、与门逻辑电路and、三极管vt1、供电模块vcc和发光二极管led,第一电流信号采样探头k1采样传感器的电源端电流信号,第一电流信号采样探头k1和与门逻辑电路and的第一输入端连接,第二电流信号采样探头k2采样传感器输出端的电流信号,第二电流信号采样探头k2和与门逻辑电路and的第二输入端连接,与门逻辑电路and的输出端与三极管vt1的基极连接,三极管vt1的集电极与供电模块vcc连接,三极管vt1的发射极与发光二极管led的阳极连接,发光二极管led的阴极接地。
[0026]
在具体应用中,采集系统1包括温度传感器、流量传感器、加速度传感器、压力传感器、开关量检测单元、电流采集单元、电压采集单元和振动传感器,温度传感器和振动传感器安装在液压机的高压柱塞泵处,用于对高压柱塞泵的振动信号和温度信号的采集,压力传感器和流量传感器安装在液压机的先导式溢流阀处,用于采集先导式溢流阀的压力信号和流量信号,加速度传感器、开关量检测单元、电流采集单元和电压采集单元安装在液压机的液压回路元件处,用于采集液压回路元件的加速度参数、开关量状态、电流信号和电压信号,各传感器将采集到的数据信息传递给推理机3后,推理机3结合存储系统4存储数据和采集系统1采集的数据进行液压机故障推理,将结果通过液压机模拟图形系统和人机交互系统5进行直观显示。
[0027]
一种基于智能系统的液压机故障诊断方法,包括以下步骤:步骤s1:通过采集系统
1实时采集液压机工作信号;步骤s2:采集系统自检装置2对采集系统故障和液压系统故障进行区别;步骤s3:推理机3通过采集系统采集的信号和存储系统4存储的知识模型进行故障推理;步骤s4:人机交互系统5将推理机3的推理结果进行显示。存储系统4的知识模型包括第一知识模型、第二知识模型、第三知识模型、第四知识模型和第五知识模型。
[0028]
第一知识模型的建立方法为:if{satusn
i
,satusflag,satusd
i
,{sf
ij
,sv
ij
,fd
ij
}}then{(satusn
i
,satusflagfin,{daqf
ij
,daqtheoryv
ij
,daqd
ij
})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,satusni表示第i个状态的编号,状态分为正常状态和故障状态,satusflag是一个标识,是专家系统识别这组数据的标识。satusdi为状态信息描述,包括状态的名称。sfij表示第i个状态的第j个特征名称,svij表示第i个状态的第j个特征的特征值,这里的值只有1或者0。fd为特征的文字描述,便于知识库的维护,satusflagfin是一个标识,是专家系统识别这组数据的标识。daqfij表示第i个状态的第j个采集数据的特征名称。daqtheoryvij表示第i个状态的第j个采集数据特征的特征理论值。实现了根据电磁阀动作逻辑,确定了当前的液压机的状态,并推导出了在这个状态下各个采集压力、流量等特征的理论特征值。
[0029]
第二知识模型的建立方法为:if{(satusn
i
,enablequflag)then{(satusn
i
,qucflagfin,{daqf
ij
,daqv
ij
,daqd
ij
})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,satusni表示第i个状态的编号,状态分为正常状态和故障状态,enablequflag是一个标识,是专家系统识别这组数据的标识,也是允许数据采集的标志。qucflagfin是采集结束到位后的标识。daqfij表示第i个状态的第j个采集数据的特征名称。daqvij表示第i个状态的第j个采集数据特征的特征实际值。
[0030]
第三知识模型的建立方法为:if{satusn
i
,qucflagfin,satusflagfin}then{(satusn
i
,op_flagfin,{daqf
ij
,outv
ij
={(daqtheoryv
ij
,daqv
ij
),( ,-,*,/)})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,op_flagfin是标识。实现采样值与理论值的比较运算,并将运算结果存放到outv中。
[0031]
第四知识模型的建立方法为:if{satusn
i
,op_flagfin,satusflagfin}then{(satusn
i
,co_flagfin,{daqf
ij
,outresultv[k]
ij
=(outv
ij
,conferv
ij
),dff
ij
})i=1,2,3,
…
,n;j=1,2,3
…
m};其中,co_flagfin是标识,通过该模型的运算后,凡是与标准误差的差值超过dffij的要求后,这些特征被记录到outresultv[k]ij中,其中,k表示层次,也就是说每采集一次数据就会计算一次。
[0032]
第五知识模型的建立方法为:if{satusn
i
,co_flagfin,(daqf
ij
,outresultv[k]
ij
)}then{(satusn
i
,g_flagfin,daqf
ij
,outgv{k}
ij
)i=1,2,3,
…
,n;j=1,2,3
…
m};
f10.80.2 根据概率计算公式,可以得到:pr{v9}=74.5%pr{v5}=25.5%可以看出,v9即预充阀发生故障的概率较大,与实际是相符的,说明系统的推理的有效性。
[0036]
以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

