一种北斗/gps同步闪航标灯装置的微差闪烁控制方法
技术领域
1.本发明涉及一种水运助航设施——航标灯,特别是一种北斗/gps同步闪航标灯装置的微差闪烁控制方法。
背景技术:
2.航标灯是保障船舶夜航安全的重要设施之一,通常沿航道部署,在夜晚按设定灯质(灯质,亮/灭闪烁的周期编码)闪烁,为来往船舶指示航道状况。无线电导航与授时技术发展,促进形成了同步闪航标灯,即毗邻的航标灯以相同灯质在同一时刻同时亮或灭,可以使桥区航道界限分明,提高助导航效果。
3.所谓航标灯微差闪烁(differential flashing),或称为航标灯微差闪,是一种对毗邻的同步闪航标灯进行延时时间间隔为几毫秒到几百毫秒的控制方法。对毗邻的同步闪航标灯进行微差闪烁控制,可以实现同步闪航标灯的次第闪烁;对一批毗邻的同步闪航标灯进行微差闪烁控制,就会形成类似于“多米诺骨牌效应”的闪烁效果,有助于提高视觉航标在夜间指示航道的整体效能,特别适合于受限航道如桥区以及重要设施如海上风电场等应用场景。
4.文献cn108877247a公开了一种道路诱导灯控制方法及控制系统,能够以动态差异化的灯态闪烁,在较低能见度以及路况较差情况下为驾驶员提供立体化的道路路型引导,有效防止交通事故的发生。对航标灯开展微差闪烁控制,首先需要解决两个问题:精确授时和灯质同步,其次是如何协调微差。文献cn105281859b发明的高精度授时方案,在不需增加其他辅助设备前提下,在每分钟零秒时刻实现rtc时钟和gps utc时钟同步,达到较精确的授时效果;文献cn106163026b发明了一种灯器的同步闪快速控制实现方法,可每分钟实现同步闪烁的检查与控制,达到较精确的同步闪效果;文献cn106163030b发明了一种同步闪灯器的低功耗实现方法,在维持同步闪功能时,进一步促进降低整机功耗。
5.如果在北斗/gps航标灯硬件组成基础上,使用较少资源控制同步闪航标灯实现微差闪烁,可进一步创新拓展视觉航标的功能,为受限航道、重要设施等具体应用场景提供一种新型的航标灯器。
技术实现要素:
6.本发明的目的是为北斗/gps同步闪航标灯装置提供的一种微差闪烁控制方法,可以为受限航道如桥区以及重要设施如海上风电场等应用场景提供更加清晰的视觉助导航服务。
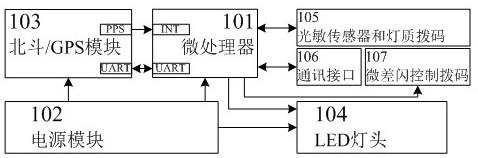
7.为达到上述目的,本发明的技术方案是:一种北斗/gps同步闪航标灯装置,由微处理器101、电源模块102、北斗/gps模块103、led灯头104、光敏传感器和灯质拨码105、通讯接口106、微差闪控制拨码107组成;电源模块102分别和微处理器101、北斗/gps模块103、led灯头104相连;微处理器101和北斗/gps模块103、led灯头104、光敏传感器和灯质拨码105、通讯接口106、微差闪控制拨码107相连,其中
微处理器101具有中断功能的int引脚和北斗/gps模块103的pps信号引脚相连,微处理器101的uart引脚和北斗/gps模块103的uart引脚相连,微处理器101的一个io引脚和led灯头104相连。
8.所述微处理器101,通过灯质拨码修改灯质,或通过通讯接口106接收外部指令来修改灯质;光敏传感器测量获得光照度,决定是否需要亮灯操作。
9.所述的通讯接口106,可以是ttl串口,可以是rs232,可以是rs485。
10.所述的微差闪控制拨码107,可以是一组n位拨码阵列,其中n为4-16,也可以是旋转拨码开关。
11.所述微处理器101,内部设置有一个时间定时器t1,用来控制灯器的亮/灭时长,t1周期(t
t1
)的单位为毫秒,通常取值范围:5~100,通常取50。
12.所述微处理器101,内部有一个灯器的灯质控制结构寄存器,由【灯质的数据编码数组】、【灯质的数据编码数组序号】单元、【当前编码数据】单元、【灯质同步时刻】(单位:分)和【时间同步时刻】(单位:秒)组成。
13.所述微处理器101,【灯质的数据编码数组】中,偶数序号的数据编码为亮的时长编码,奇数序号的数据编码为灭的时长编码。
14.所述微处理器101,其flash保存了255种符合国标的灯质及其编码,当拨码或指令修改灯质时,从flash中读取对应灯质的数据编码到灯质控制结构寄存器的【灯质的数据编码数组】中,然后计算获得灯质同步时刻(单位:分),并保存在灯质控制结构寄存器的【灯质同步时刻】中。
15.所述灯质的数据编码,其算法是:用灯质中的各亮、灭时长(单位:秒)乘以1000后再除以t1周期(t
t1
),结果必须为整数(即t
t1
的取值必须满足此条件),该结果保存到【灯质的数据编码数组】中,如果不为整数,需重新调整t
t1
,以满足灯质中各亮、灭的数据编码均为整数。
16.所述的灯质同步时刻,是在灯质确定后计算获得的,计算方法是:n=m
×
sum
dz
×
t
t1
/(1000
×
60)其中,sum
dz
为设定灯质的数据编码累积和;t
t1
为定时器t1的周期,单位:毫秒;m为实现n为整数的最小整数值;n为整数,表示同步时刻,单位:分,通常取值范围:1~59。
17.n的数值保存【灯质同步时刻】中。
18.所述微处理器101,当时间定时器t1中断发生时,首先检查【当前编码数据】单元的数据是否为0,如果不为0,则【当前编码数据】单元的数据进行减一操作即可,否则如果为0,则将【灯质的数据编码数组序号】单元的数据加一,即后移,然后据此从【灯质的数据编码数组】读取对应的数据编码到【当前编码数据】单元。
19.所述微处理器101,当开始北斗/gps报文数据解析,获得报文中的utc分和utc秒时刻,通过计算公式:60-utc秒时间,获得时间同步时刻并保存在【时间同步时刻】。
20.所述微处理器101,区别于通常的北斗/gps同步闪航标灯装置的是内部有一个微差闪控制结构寄存器,由【时长单元】(单位:毫秒)、【时间步长单元】(单位:毫秒)和【定时中断计数单元】组成。所述微差闪控制结构寄存器,其【时长单元】和【时间步长单元】,均可以
通过通讯接口106以协议指令方式进行修改。所述微差闪控制结构寄存器,其【时长单元】还可以通过微差闪控制拨码107修改调整,此时,【时长单元】=【时间步长单元】
×
微差闪控制拨码107的编码值。
21.所述微处理器101,其flash保存了微差闪控制结构寄存器的数据,在开机时从flash中读取这个微差闪控制结构寄存器数据;当通过微差闪控制拨码、或通过通讯接口106接收外部指令来修改设置这个微差闪控制结构寄存器时,会将微差闪控制结构寄存器的数据保存到flash对应地址中。
22.所述微处理器101,当进入到由北斗/gps模块103的pps信号引起的int中断服务时,首先检查【时间同步时刻】的数据是否为0,当为0时,就退出int中断服务程序,当不为0时,进行后续步骤操作,将【时间同步时刻】保存的数据进行减一操作,再判断【时间同步时刻】是否为0,如果【时间同步时刻】为0,则意味着当前时刻为x分0秒(x在0~59之间),此时需进行微差闪烁控制操作,即微差闪烁控制操作是在由pps信号引起的int中断服务中完成的,否则【时间同步时刻】不为0,退出int中断服务。
23.所述的灯质同步控制操作,将【灯质的数据编码数组序号】单元的数据修改为0,即指向【灯质的数据编码数组】首地址,读取【灯质的数据编码数组】中序号0的数据编码到【当前编码数据】单元。
24.所述微处理器101,内部设定有一个定时器t
df
,单位为毫秒。
25.所述的微差闪烁控制操作,用utc时时间乘以60后和utc分时间的累加值除以【灯质同步时刻】保存的数值,即求余运算,如果余数不为0,就退出本模块,否则为0,再根据微差闪控制结构寄存器中的【时长单元】数值是否为0决定下一步操作,如果微差闪控制结构寄存器中的【时长单元】为0,则执行灯质同步控制操作,否则不为0,就设置定时器t
df
的周期时长=微差闪控制结构寄存器的【时长单元】,开启定时器t
df
。
26.所述微处理器101,当定时器t
df
中断服务程序开始后,执行灯质同步控制操作,并关闭定时器t
df
。
27.与现有技术相比,本发明的有益效果是:在北斗/gps同步闪航标灯装置硬件基础上,可实现同步闪航标灯装置的微差闪烁控制,应用本方法对一批北斗/gps同步闪航标灯进行微差闪烁控制,会形成类似于“多米诺骨牌效应”的闪烁效果,提高视觉航标在夜间指示航道的整体效能。
28.本发明的目的、特征及优点将通过实施例并结合附图进行详细说明。
附图说明
29.图1是本发明的航标灯结构框图。
30.图2是本发明的北斗/gps报文数据解析流程图。
31.图3是本发明的pps信号int中断服务流程图。
32.图4是本发明的微差闪控制操作流程图。
33.图5是本发明的定时器t
df
中断服务流程图。
34.图6是本发明的灯质同步控制流程图。
具体实施方式
35.图1中,101是微处理器,102是电源模块,103是北斗/gps模块,104是led灯头,105是光敏传感器和灯质拨码,106是通讯接口,107是微差闪控制拨码;103的pps引脚、uart引脚分别与101的int、uart引脚连接,101的一个引脚与104连接,102分别与101、103和104连接,101分别和105、106、107相连。
36.为了更详细的描述本发明,下面结合图2、图3和图4作进一步说明。
37.步骤201:北斗/gps报文数据解析开始,执行步骤202;步骤202:判断报文中是否有utc时间,如果没有,则执行步骤205,如果有,则执行步骤203;步骤203:解析获得utc时分秒数据,执行步骤204;步骤204:将utc秒数据代入转换公式,计算获得时间同步时刻,转换公式为:60-utc秒时间,然后执行步骤205;步骤205:北斗/gps报文数据解析结束。
38.步骤301:pps信号int中断服务开始,执行步骤302;步骤302:判断【时间同步时刻】的数据是否为0,为0,则执行步骤306,否则不为0,执行步骤303;步骤303:【时间同步时刻】的数据进行减一操作,执行步骤304;步骤304:判断【时间同步时刻】的数据是否为0,不为0则执行步骤306,否则为0,执行步骤305;步骤305:执行微差闪烁控制操作,执行步骤306;步骤306:pps信号中断服务结束。
39.步骤401:微差闪烁控制操作开始,执行步骤402;步骤402:计算当前分,计算公式为:utc时间的时
×
60 utc时间的分,然后执行步骤403;步骤403:用计算获得的当前分对【灯质同步时刻】进行求余运算,例如:x=当前分%【灯质同步时刻】;(%符号为c语言中求余运算符),然后执行步骤404;步骤404:对步骤403中获得的余数x进行判断,如果为0,则执行步骤405,否则不为0,执行步骤408;步骤405:检查微差闪控制结构寄存器【时长单元】是否为0,如果为0,执行步骤407,否则不为0,执行步骤406;步骤406:设置定时器t
df
的周期时长=微差闪控制结构寄存器的【时长单元】,开启定时器t
df
,然后执行步骤408;步骤407:执行灯质同步控制操作,然后执行步骤408;步骤408:微差闪烁控制操作结束。
40.步骤501:定时器t
df
中断服务开始,执行步骤502;步骤502:关闭定时器t
df
,进行灯质同步控制操作,执行步骤503;步骤503:定时器t
df
中断服务结束。
41.步骤601:灯质同步控制操作开始,执行步骤602;步骤602:【灯质的数据编码数组序号】单元=0,【当前编码数据】单元=【灯质的数据编码
数组】序号0的数据,即【灯质的数据编码数组序号】单元指向【灯质的数据编码数组】首地址,读取【灯质的数据编码数组】首地址的数据到【当前编码数据】单元,然后执行步骤603;步骤603:灯质同步控制操作结束。
42.虽然以上描述了本发明的具体实施方式,但是熟悉本技术领域的技术人员应该理解,我们所描述的具体实施例只是说明性的,而不是用于对本发明范围的限定,任何受本发明技术路线启发所作的等效修饰以及变化,都应当涵盖在本发明权利要求所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。