1.本发明涉及一种用于确定电机驱动隔膜泵的隔膜或驱动活塞的位置的方法,特别是检测这种隔膜泵的隔膜运动过程中上、下反转点的方法。
背景技术:
2.在现有技术中用于输送液体或气体的隔膜泵通常是已知的。
3.在现有技术中可获得各种设计的隔膜泵。所有隔膜泵设计基本上都涉及用于输送液体或气体的机器,其对输送材料中的长期应力和污染特别不敏感。隔膜泵的工作原理是已知活塞泵的改进,但待输送的介质通过隔膜与驱动器分开。这种泵的优点是,通过分离隔膜保护驱动器免受来自诸如污泥或杂质的输送介质的有害影响。特别地,这意味着隔膜泵在持续应力中低磨损并且不敏感,这使得这种机器非常适合具有长的操作时间和待机时间的输送任务,例如工业或机动车辆环境中发生的任务。
4.传统的隔膜泵有由隔膜封闭并通过阀门保障入口侧和出口侧的输送腔室。当隔膜被按压或拉动时,所述输送腔室容积发生变化,由此根据阀门设计发生抽吸或压缩过程并因此发生流体的输送。隔膜以液压、气动、机械或电磁方式执行偏离。
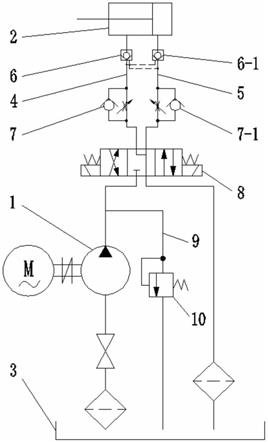
5.本发明涉及一种电机驱动、即由电机机械驱动的隔膜泵。这种电机驱动的隔膜泵在大多数情况下由电机通过连杆、即驱动活塞和偏心轮驱动。
6.相对于挺杆或连杆沿偏心驱动装置的运动,一般类型的隔膜泵沿偏心轮的一个旋转方向具有高扭矩波动。从出版物de 102016125578 a中已知一种由电机通过偏心装置进行操作的隔膜泵,所述隔膜泵使用往复偏心驱动的特殊驱动概念。
7.对于隔膜泵来说,其目的是掌握隔膜的机械位置,从而掌握偏心轮上的驱动活塞的机械位置,以便能够通过电机驱动实现高效的泵运行。此外,为了调整阀门,必须检测隔膜从输送量增加的吸入阶段到输送量减少的加压阶段的反转点,因为过早或过迟的阀门致动会导致低效操作。此外,对于基本的泵控制,需要检测隔膜层的位置,特别是隔膜的相应的上死点和下死点的时间。
技术实现要素:
8.本发明的目的是提出一种装置和方法,其允许以简单且低成本的方式可靠地检测电机驱动隔膜泵的隔膜的位置。
9.所述目的通过根据权利要求1的特征组合来实现。
10.根据本发明,提供一种用于确定电机驱动隔膜泵的隔膜或驱动活塞的位置的位置检测装置,特别是检测通过偏心装置以电机操作的隔膜泵的隔膜运动过程中的上、下反转点,其中由驱动连杆致动的隔膜以在最小容积和最大容积之间容积可变的方式关闭在入口侧和出口侧设有阀门装置的输送腔室,由于偏心装置的作用将具有转子的电机的旋转运动转换为所述驱动连杆的致动运动,其中所述位置检测装置具有用于检测在隔膜的运动过程中所述隔膜泵的负载曲线的检测装置以及用于从所述负载曲线确定至少所述隔膜的上反
转点和下反转点的位置的评估装置。
11.在本发明的范围内,上、下反转点应理解为隔膜的这些位置:在所述位置所述隔膜的相应的运动方向在其上下移动时沿相反方向改变,因此在这些点处的输送量交替地再次缩小或增大。
12.在本发明的一个特别有利的实施例中规定,所述检测装置被设计成在隔膜的完全的上下运动期间,更优选地在隔膜泵的整个运动期间,特别地检测隔膜泵的扭矩曲线,从而保证隔膜在其反转点的连续的位置检测。
13.还有利地规定,设置测量装置以检测电动机的转子的位置,其中转子位置的检测有利地通过多个位置传感器、且更优选地通过用于检测当前旋转角度的角度钟来进行。
14.在本发明的一个特别有利的实施例中规定,位置检测装置具有评估装置,所述评估装置被设计成至少从负载曲线和其中包含的相对扭矩最大值和/或扭矩最小值以及与其平行检测的转子的位置累积地确定隔膜的位置,特别是确定所述隔膜的上、下反转点。
15.本发明的另一方面涉及一种设计具有如上所述的位置检测装置的隔膜泵。
16.本发明的另一个发明方面涉及一种用于确定电机驱动隔膜泵的隔膜或驱动活塞的位置的方法,特别是检测由偏心装置以电机操作的隔膜泵的隔膜在运动过程中的上、下反转点,其中由驱动连杆致动的隔膜以在最小容积和最大容积之间的容积可变的方式关闭在入口侧和出口侧设有阀门装置的输送腔室,由于偏心装置的作用将具有转子的电机的旋转运动转换为驱动连杆的致动运动,其中所述位置通过所述负载曲线和其中所包含的所述相对扭矩最大值和/或扭矩最小值的检测中确定。
17.有利地规定,所述方法通过如上所述的位置检测装置来执行。
18.还有利地,通过评估装置根据所述负载曲线的数据记录连同所述转子的位置累积地确定所述隔膜的位置、优选地所述隔膜的所述上反转点和所述下反转点的位置。
19.所述驱动电机是换流器供电的直流电机,并且所述负载曲线是从所述电机的基点电流测量值间接确定的,其中总电流的测量值优选地在所述换流器的换流器桥的基点或供电点处测量。
附图说明
20.本发明的其它有利改进方案在从属权利要求中表征或在下面连同参考附图的本发明的优选实施例的描述一起更详细地示出。
21.其中示出:
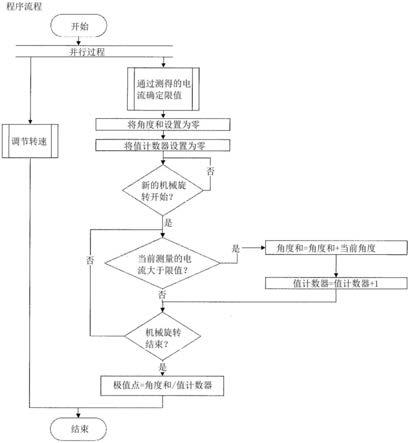
22.图1显示确定本发明极值点的步骤的流程图。
具体实施方式
23.下面根据参考图1的示例性实施例更详细地描述本发明。
24.图1示出了两个并行运行进程的流程图。在确定极值点的整个过程中,调节驱动隔膜泵的电机的转速。流程图的右侧部分显示如何进行上、下反转点(极值点)的检测。
25.由于隔膜反转点的位置检测通过位置传感器和角度钟以及电机电流(负载曲线)从转子位置中得出,因此还需要相应电机电流的限值,因此每次旋转周期地变化达到最大值。
26.通过测量电流确定极限值后,首先将角度的和的存储值和值计数器设置为零,然后可以开始新的机械旋转或检查新的机械旋转是否已开始。如果是这种情况,评估装置检查当前检测到的电流是否大于限值。如果是这种情况,则通过每次将当前确定的角度加到角度和的存储值并且每次将值计数器增加1,而确定所述角度和。与之进行比较的限值优选地是经过严格过滤的电机电流。然后将所述电机电流与该限值进行比较,一旦所述电机电流小于或等于该限值,就会达到极值点。原则上,角度钟是一种存储器,其以每个时间间隔(例如100ps)增加所述转子由于其当前速度而覆盖的量。原则上,在此处角度段(winkelst
ü
cke)总是相加,这些角度段以“度”为单位。
27.进行所述过程直到迭代查询检测到机械旋转已经结束。然后可以从角度和以及值计数器确定极值点。
28.本发明的实施不限于上述优选实施例。相反,即使在根本不同设计的情况下,也可以想到使用所示解决方案的多种变型。
技术特征:
1.一种用于确定电机驱动隔膜泵的隔膜或驱动活塞的位置的位置检测装置,特别是检测通过偏心装置以电机操作的隔膜泵的隔膜的运动过程中的上反转点和下反转点,其中由驱动连杆致动的隔膜以在最小容积和最大容积之间容积可变的方式关闭在入口侧和出口侧设有阀门装置的输送腔室,由于所述偏心装置的作用将具有转子的电机的旋转运动转换为所述驱动连杆的致动运动,其中所述位置检测装置具有用于检测在隔膜的运动过程中所述隔膜泵的负载曲线的检测装置以及用于从所述负载曲线确定至少所述隔膜的上反转点和下反转点的位置的评估装置。2.根据权利要求1所述的位置检测装置,其特征在于,所述检测装置设计成在所述隔膜的完全上下运动期间,就特别地检测所述隔膜泵的扭矩曲线。3.根据权利要求1所述的位置检测装置,其特征在于,还设置测量装置,以检测所述电机的所述转子的位置。4.根据权利要求3所述的位置检测装置,其特征在于,用于检测所述转子位置的所述测量装置通过多个位置传感器,特别是通过霍尔传感器进行,还优选地通过用于检测当前旋转角度的角度钟进行。5.根据权利要求3或4所述的位置检测装置,其特征在于,其具有评估装置,所述评估装置设计成根据至少所述负载曲线和其中所包含的相对扭矩最大值和/或扭矩最小值以及所述转子的位置累积地确定所述隔膜的位置,特别是所述隔膜的所述上反转点和所述下反转点。6.一种隔膜泵,其构造成具有根据前述权利要求1至5中任一项所述的位置检测装置。7.一种用于确定电机驱动隔膜泵的隔膜或驱动活塞的位置的方法,特别是检测由偏心装置以电机操作的隔膜泵的隔膜在运动过程中的上和/或下反转点,其中由驱动连杆致动的隔膜在最小容积和最大容积之间容积可变地关闭在入口侧和出口侧设有阀门装置的输送腔室,通过所述偏心装置的作用将具有转子的电机的旋转运动转换为所述驱动连杆的致动运动,其中所述位置通过所述负载曲线和其中所包含的所述相对扭矩最大值和/或扭矩最小值的检测中确定。8.根据权利要求7所述的方法,其通过根据前述权利要求1至5中任一项所述的位置检测装置执行。9.根据权利要求7或8所述的方法,其特征在于,通过评估装置根据所述负载曲线的数据记录连同所述转子的位置累积地确定所述隔膜的位置、优选地所述隔膜的所述上反转点和所述下反转点的位置。10.根据权利要求7至9中任一项所述的方法,其特征在于,所述驱动电机是换流器供电的直流电机,并且所述负载曲线是从所述电机的基点电流测量值间接确定的,其中总电流的测量值优选地在所述换流器的换流器桥的基点或供电点处测量。
技术总结
本发明涉及一种用于确定电机驱动隔膜泵的隔膜或驱动活塞的位置的位置检测装置,特别是检测经由偏心装置以电机操作的隔膜泵的隔膜的运动过程中的上、下反转点(Po、Pu),其中由驱动连杆致动的隔膜以在最小容积和最大容积之间容积可变的方式关闭在入口侧和出口侧设有阀门装置的输送腔室,由于偏心装置的作用将具有转子的电机的旋转运动转换为所述驱动连杆的致动运动,其中所述位置检测装置具有用于检测在隔膜的运动过程中隔膜泵的负载曲线的检测装置以及用于根据所述负载曲线确定至少所述隔膜的上反转点和下反转点的位置的评估装置。装置。装置。
技术研发人员:大卫
受保护的技术使用者:依必安-派特圣乔根有限责任两合公司
技术研发日:2020.04.29
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。