一种基于can总线可扩展的通讯系统
技术领域
1.本发明属于通讯定位技术领域,尤其涉及一种用于群控水下设备的基于can总线可扩展的通讯系统。
背景技术:
2.随着海洋科学研究的加深,水下滑翔机、水下自主潜航器(auv)、argo浮标等在内的水下设备平台技术得到了快速的发展,其续航能力强、航程远、隐蔽性强的特点使得其非常适合海洋生、化、物等参数的测量工作,是最常用的水下移动观测平台之一。
3.水下设备如水下滑翔机、水下自主潜航器(auv)、argo浮标往往会不定时的出水后将定位信息以及其他传感器信息通过卫星发到岸边监控站,岸边监控站的计算机通过通讯单元下发控制命令给水下设备进行下潜等指令。目前,每个通讯单元控制一台水下设备,多个水下设备之间无信息交互,难以实现多个水下设备快速协同部署。多个水下设备协同通讯控制需要根据工作场景配备相适配的成套通讯系统,配置工作复杂效率低。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种解决目前无可根据水下设备数量快速改变相适配的通讯方案的问题的基于can总线可扩展的通讯系统。
5.本发明是这样实现的,一种基于can总线可扩展的通讯系统,其特征在于:包括计算机、通讯背板和至少一通讯单元;所述计算机与通讯单元之一通过以太网络通讯连接;所述计算机用于接收所述通讯单元发送的水下设备的工作状态信息、水下设备搭载的传感器信息,并向所述通讯单元发送指令信息;所述通讯单元用于接收水下设备的工作状态信息、水下设备搭载的传感器信息、且可将所述计算机的指令信息发送至水下设备;所述通讯单元与所述通讯背板连接,所述通讯背板具有至少两个用于连接通讯单元的单元接口,不同通讯单元通过通讯背板进行信息通讯。
6.在上述技术方案中,优选的,所述通讯单元包括铱星模块、gps模块、状态显示灯、以太网模块、供电模块、can通讯模块、调试接口、mcu控制器以及欧式插座;所述铱星模块用于与水下设备的铱星模块进行通讯,传递所述计算机与水下设备的通讯信息;所述的gps模块用于定位通讯系统的位置;所述的状态显示灯用于显示铱星模块的信号的强度、拨号连接状态、数据传输状态、定位状态;所述的以太网模块用于计算机与mcu控制器之间进行数据交互;所述的供电模块用于连接电源并为通讯单元供电,保证通讯单元可以单独使用;所述的can通讯模块用于各个通讯单元之间通讯连接;所述的调试接口用于对mcu控制器的程序更新;所述的欧式插座用于通讯单元与通讯底板进行信息交互以及供电。
7.在上述技术方案中,优选的,所述通讯单元包括三个铱星模块。
8.在上述技术方案中,优选的,所述通讯背板包括供电模块和用于安装所述通讯单元的卡槽。
9.本发明的优点和技术效果是:
10.1、本发明所提出的通讯系统,可实现水下设备的集群控制,是一种集成度高、能够快速部署的通讯系统,便于实现多个水下设备快速协同部署;
11.2、本发明所提出的通讯系统,可以根据水下设备的数量配置对应数量的通讯单元,适配性强,快速适用不同的使用场景;
12.3、本发明所提出的通讯系统中所有配置的通讯单元可通过任意一个通讯单元的以太网输出,配置灵活、布线简单;
13.4、本发明所提出的通讯系统,通讯单元与水下设备一一匹配,通讯单元可单独使用,具有单个水下设备的独立控制功能。
附图说明
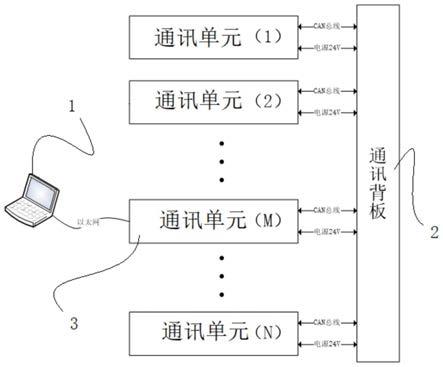
14.图1是本发明的统总体示意图;
15.图2是本发明的通讯单元的示意图;
16.图3为本发明的通讯背板示意图。
17.图中、1、计算机;2、通讯背板;2
‑
1、供电模块;2
‑
2、卡槽;3、通讯单元;3
‑
1、铱星模块;3
‑
2、gps模块;3
‑
3、状态显示灯;3
‑
4、以太网模块;3
‑
5、供电模块;3
‑
6、can通讯模块;3
‑
7、调试接口;3
‑
8、mcu控制器;3
‑
9、欧式插座。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
19.为解决目前无可根据水下设备数量快速改变相适配的通讯方案的问题,本发明特提供一种基于can总线可扩展的通讯系统,本系统集成度高、能够快速部署,适配性强,可快速适用于不同的使用场景。为了进一步说明本发明的结构,结合附图详细说明书如下:
20.请参阅图1,一种基于can总线可扩展的通讯系统,包括计算机1、通讯背板2和至少一通讯单元3。
21.计算机1为上位机,其装载有甲板控制软件。计算机1与通讯单元3之一通过以太网络通讯连接。计算机1通过以太网络接收通讯单元3发送的水下设备的工作状态信息、水下设备搭载的传感器信息,计算机1通过以太网络向通讯单元3发送指令信息。
22.工作状态信息包括水下设备的潜行深度、潜行速度等状态信息,传感器信息包括如声学传感器、温度传感器等所发出的信息,指令信息主要包括用于控制水下设备潜行动作的控制指令信息。
23.通讯单元3实现计算机所装载的甲板控制软件与水下设备进行卫星通讯,将水下设备的工作状态、水下设备携带传感器的信息通过通讯单元3上传到计算机1的甲板控制软件,同时计算机中1的甲板控制软件通过通讯单元3将下发的信息发送到水下设备中。
24.请参阅图3,通讯背板2为通讯线路板,通讯单元3与通讯背板2连接,通讯背板2具有至少两个用于连接通讯单元3的单元接口,不同通讯单元3通过通讯背板2进行信息通讯。即通讯背板2用于多个通讯单元3之间的通讯,将通讯单元3之间的信息统一通过一个与计算机1以太网连接的通讯单元3发出。
25.单元接口包括can总线接口和电源接口,不同单元接口的can总线接口通过通讯背板2的线路连接。通讯背板2具有可通过电源接口与通讯单元电连接的供电模块2
‑
1,电源接口通过通讯背板2的线路连接供电模块。通讯背板具有至少两个欧式插座,欧式插座集成can总线接口和电源接口。
26.请参阅图2,通讯单元3包括铱星模块3
‑
1、gps模块3
‑
2、状态显示灯3
‑
3、以太网模块3
‑
4、供电模块3
‑
5、can通讯模块3
‑
6、调试接口3
‑
7、mcu控制器3
‑
8以及欧式插座3
‑
9。
27.铱星模块3
‑
1用于与水下设备所搭载的铱星模块进行通讯,铱星模块3
‑
1通过卫星与装载铱星模块的水下设备建立通讯连接,用于传递计算机1与水下设备之间的通讯信息。具体的,本实施例中,铱星模块3
‑
1的型号为iridium 9523。
28.mcu控制器3
‑
8为微控制单元,可以与外部设备进行数据交互,mcu控制器3
‑
8接收与之连接的各个模块的信息、处理并控制各个模块运行。
29.gps模块3
‑
2与mcu控制器3
‑
8连接,用于定位通讯系统的位置。本实施例中,具体的,gps模块3
‑
2的型号为gstar
‑
gs
‑
92m
‑
j。
30.状态显示灯3
‑
3用于显示铱星模块3
‑
1的信号的强度、拨号连接状态、数据传输状态、定位状态。
31.以太网模块3
‑
4与mcu控制器3
‑
8电连接,以太网模块3
‑
4用于计算机1与mcu控制器3
‑
8之间进行数据交互。
32.供电模块3
‑
5与mcu控制器3
‑
8电连接,且每个通讯单元3供具有独立的与供电模块3
‑
5电连接的电源插座,用于连接电源并为通讯单元3供电,保证通讯单元3可以单独使用。
33.can通讯模块3
‑
6与mcu控制器3
‑
8连接,可将信息传递给mcu控制器3
‑
8。不同通讯单元3上的can通讯模块3
‑
6可建立通讯连接。
34.调试接口3
‑
7与mcu控制器3
‑
8连接,用于对mcu控制器3
‑
8的程序更新。调试接口3
‑
7为rs232调试接口。
35.通讯单元3的欧式插座3
‑
9与通讯背板2的欧式插座具有相适配的公头和母头,用于通讯单元与通讯底板进行信息交互以及供电。本实施例中,欧式插座选用j0903 196 6921b及类似连接器。
36.通讯背板2具有至少两个用于插装通讯单元的卡槽2
‑
2,卡槽2
‑
2内设置欧式插座。卡槽2
‑
2内设置欧式插座由can总线串接,卡槽2
‑
2内设置欧式插座与供电模块2
‑
1连接。
37.通讯背板2上具有n个单元接口,单元接口的结构形式为所述的卡槽2
‑
2,通讯单元3包括三个铱星模块3
‑
1,以本通讯系统中所配置的通讯单元数量作为区分,列举以下实施例:
38.实施例一
39.通讯系统为满载控制状态:系统中所配备的铱星模块3
‑
1数量为3*n,每个铱星模块3
‑
1与一水下设备通过卫星建立通讯连接,系统可以控制3*n个水下设备。计算机1通过网线与其中的一个通讯单元3连接。计算机1所装载的甲板控制软件通过网口设置与之连接的通讯单元3为主设备通讯单元(m),其余n
‑
1个通讯单元3的信息通过通讯背板与此通讯单元(m)通讯。
40.实施例二
41.通讯系统多线控制状态:系统与建立通讯连接的水下设备数量为x(x<n),根据水
下设备数量配备系统中通讯单元3数量。计算机1通过网线与其中的一个通讯单元3连接。计算机1所装载的甲板控制软件通过网口设置与之连接的通讯单元3为主设备通讯单元(m),其余通讯单元3的信息通过通讯背板与此通讯单元(m)通讯。
42.实施例三
43.系统与建立通讯连接的水下设备数量为x(x≤3),可为独立通讯单元3,无需通讯背板2,计算机1通过网线与通讯单元3连接进行数据交互。
44.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

