1.本发明涉及一种利用摄像头区域监控与图论路径规划清扫垃圾的方法,尤其是一种无人清扫车的任务调度系统及方法。
背景技术:
2.近年来,随着人们生活水平的不断提高,人们在精神需求方面的追求也在随之增强。因此,人们茶余饭后经常到广场运动、休息,比如跳广场舞或者聚集玩耍。这就不免在广场类的较为空旷的公共场合产生垃圾,而公共场合的垃圾处理目前多依靠人工清除,耗时耗力,因此,如何有效省力地清除公共场所的垃圾成为一项难题。
3.虽然现在有清扫车的出现,但是现有的清扫车需要人工驾驶,耗费人力资源多;而且目前的无人清扫车不能实时监测某个区域,还需人力的检测与控制。
4.针对上述问题,为减少人力资源的消耗,本发明利用深度学习摄像头检测和利用图论实现路径规划,提出一种在广场等空旷公共区域的无人清扫车异物检测和调用方法。
技术实现要素:
5.本发明的目的是针对现有方法的不足,提供一种无人清扫车的任务调度系统及方法。
6.为实现上述目的,本发明提供如下技术方案:
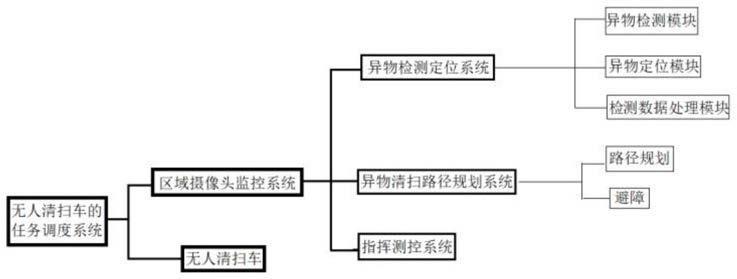
7.一种无人清扫车的任务调度系统,包括区域摄像头检测系统和无人清扫车;区域摄像头检测系统包括异物检测定位系统、异物清扫路径规划系统和指挥测控系统;
8.所述的异物检测定位系统包括异物检测模块、异物定位模块和检测数据处理模块;异物检测定位系统通过视觉检测识别垃圾与其他障碍物,并将定位所识别垃圾坐标传输到清扫路径规划模块,实现垃圾的检测与定位;其中异物检测模块用于检测并定位广场上的异物;异物定位模块用于定位所识别垃圾坐标;检测数据处理模块用于发送异物坐标信息给清扫路径规划系统。具体每个模块的实现如下:
9.异物检测模块通过深度学习收集足够的信息进行计算图的构建,通过训练与测试不断提高识别正确率用于识别和分类垃圾和其他物品;异物定位模块利用千寻位置技术实现毫米级精准定位;检测数据处理模块通过对广场建立坐标系,结合异物定位模块对垃圾的物理的定位,计算出在新建立的广场坐标下的垃圾坐标数据,发送给清扫路径规划系统。
10.所述的异物清扫路径规划系统包括路径规划模块和避障模块;异物清扫路径规划系统接收垃圾坐标数据后系统利用路径规划模块进行全局规划,并将规划路径信息发送到指挥测控系统;当行进过程中规划路径出现其他障碍物时,避障模块根据障碍物的坐标数据进行局部规划,实现实时避障。路径规划模块通过图论进行实现。
11.所述的指挥测控系统用于实现发布清扫任务给无人清扫车,待清扫完毕后回收无人清扫车。指挥测控系统将规划路径和工作指令发送给无人清扫车并监控无人清扫车行进路线,当无人清扫车完成清扫任务后,指挥测控系统下达指令回收无人清扫车到指定存放
位置;并在垃圾出现高低峰发布不同的清扫任务,高峰期小车活动频次高,低峰期小车活动频次低,待广场上垃圾到设定阈值量后再发布任务清扫。
12.具体包括如下步骤:
13.步骤1、通过异物检测模块的深度学习能力发现垃圾;
14.步骤2、利用异物定位模块通过区域固定的摄像头得到所监控地面的坐标;当发现垃圾时,利用异物定位模块找到垃圾物理中心,然后与地面坐标相匹配,得出垃圾的坐标,并把垃圾的坐标信息传送到检测数据处理模块;
15.所述的异物定位模块通过千寻位置来实现。
16.步骤3、通过检测数据处理模块的分析,将数据传输到异物清扫路径规划系统;
17.步骤4、异物清扫路径规划系统利用图论进行路径规划,并将最优规划路径信息发送到指挥测控系统;若在清扫途中出现新的垃圾,则对出现新垃圾区域通过避障模块进行局部路径规划,并将局部路径信息发送到指挥测控系统。
18.步骤5、指挥测控系统下达命令控制小车按照路径清扫垃圾;若有动态障碍物,则通过路径规划系统中的避障模块进行局部规划,实现实时避障,直到垃圾清扫完毕;
19.所述的实时避障具体实现如下:
20.图论路径规划可根据监控区域内所有的垃圾坐标点进行全局规划生成整体的清扫路线;也可在全局规划后,在实施任务途中,路线上出现障碍物,通过异物检测模块生成障碍物存在告知信息,再通过避障模块对局部重新进行路径规划,绕过障碍物并继续进行原来全局规划路线的清扫任务;若在小车周围一定范围内出现动态障碍物,则通过异物检测模块生成障碍物存在告知信息和停车告知信息,待动态障碍物移动出小车活动范围外再下达命令继续清扫垃圾。
21.步骤6、指挥测控系统下达命令,小车回收,等待下一次任务发布。
22.本发明有益效果如下::
23.1)利用千寻位置定位和图论规划路径结合,发明了一种新的清扫垃圾方法,通过区域摄像头的实时监测,可以及时收集信息,在高低峰发布不同的清扫任务,提高小车的利用率;
24.2)加入避障功能,利用ros中的move_base包,能够在进行清扫任务时避免碰撞到行人及其他障碍物,可以根据障碍物的位置及时进行新的局部路径规划;
25.3)检测功能可进一步延伸,可用于检测丢垃圾等不文明行为,提高人群文明素养。
26.本发明所提供的方案可以更加高效地利用小车,不仅实现低人力资源消耗,还可有多种延伸功能,保障公共场所地面清洁的同时为我们提供一个更加良好的休闲空间。
附图说明
27.图1为本发明结构示意图;
28.图2为本发明流程图;
29.图3为本发明一次任务实现过程示意图。
具体实施方式
30.下面结合附图和实施例对本发明作进一步说明。
31.如图1、图2和图3所示,一种无人清扫车的任务调度系统,包括区域摄像头检测系统和无人清扫车;区域摄像头检测系统包括异物检测定位系统、异物清扫路径规划系统和指挥测控系统;
32.如图1所示,所述的异物检测定位系统包括异物检测模块、异物定位模块和检测数据处理模块;异物检测定位系统通过视觉检测识别垃圾与其他障碍物,并将定位所识别垃圾坐标传输到清扫路径规划模块,实现垃圾的检测与定位;其中异物检测模块用于检测并定位广场上的异物;异物定位模块用于定位所识别垃圾坐标;检测数据处理模块用于发送异物坐标信息给清扫路径规划系统。具体每个模块的实现如下:
33.异物检测模块通过深度学习收集足够的信息进行计算图的构建,通过训练与测试不断提高识别正确率用于识别和分类垃圾和其他物品;异物定位模块利用千寻位置技术实现毫米级精准定位;检测数据处理模块通过对广场建立坐标系,结合异物定位模块对垃圾的物理的定位,计算出在新建立的广场坐标下的垃圾坐标数据,发送给清扫路径规划系统。
34.所述的异物清扫路径规划系统包括路径规划模块和避障模块;异物清扫路径规划系统接收垃圾坐标数据后系统利用路径规划模块进行全局规划,并将规划路径信息发送到指挥测控系统;当行进过程中规划路径出现其他障碍物时,避障模块根据障碍物的坐标数据进行局部规划,实现实时避障。路径规划模块通过图论进行实现。
35.所述的指挥测控系统用于实现发布清扫任务给无人清扫车,待清扫完毕后回收无人清扫车。指挥测控系统将规划路径和工作指令发送给无人清扫车并监控无人清扫车行进路线,当无人清扫车完成清扫任务后,指挥测控系统下达指令回收无人清扫车到指定存放位置;并在垃圾出现高低峰发布不同的清扫任务,高峰期小车活动频次高,低峰期小车活动频次低,待广场上垃圾到设定阈值量后再发布任务清扫。
36.如图2和图3所示,本发明具体包括如下步骤:
37.步骤1、通过异物检测模块的深度学习能力发现垃圾;
38.步骤2、利用异物定位模块通过区域固定的摄像头得到所监控地面的坐标;当发现垃圾时,利用异物定位模块找到垃圾物理中心,然后与地面坐标相匹配,得出垃圾的坐标,并把垃圾的坐标信息传送到检测数据处理模块,如图3五个坐标;
39.所述的异物定位模块通过千寻位置来实现。
40.步骤3、通过检测数据处理模块的分析,将数据传输到异物清扫路径规划系统;
41.步骤4、异物清扫路径规划系统利用图论进行路径规划,如图3从坐标1到坐标5的曲线,并将最优规划路径信息发送到指挥测控系统;若在清扫途中出现新的垃圾,如图3紫色标(x3’
,y3’
),则对出现新垃圾区域通过避障模块进行局部路径规划,并将局部路径信息发送到指挥测控系统,如图3实现为实际路线,虚线部分为新垃圾出现前所规划的路径。
42.步骤5、指挥测控系统下达命令控制小车按照路径清扫垃圾;若有动态障碍物,则通过路径规划系统中的避障模块进行局部规划,实现实时避障,直到垃圾清扫完毕;
43.所述的实时避障具体实现如下:
44.图论路径规划可根据监控区域内所有的垃圾坐标点进行全局规划生成整体的清扫路线;也可在全局规划后,在实施任务途中,路线上出现障碍物,通过异物检测模块生成障碍物存在告知信息,再通过避障模块对局部重新进行路径规划,绕过障碍物并继续进行原来全局规划路线的清扫任务;若在小车周围一定范围内出现动态障碍物,则通过异物检
测模块生成障碍物存在告知信息和停车告知信息,待动态障碍物移动出小车活动范围外再下达命令继续清扫垃圾。
45.步骤6、指挥测控系统下达命令,小车回收,等待下一次任务发布。
46.本发明所提供的方案可以更加高效地利用小车,不仅实现低人力资源消耗,还可有多种延伸功能,保障公共场所地面清洁的同时为我们提供一个更加良好的休闲空间。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

